温度控制系统模糊自适应PID控制设计与仿真
2012-09-25吴剑威唐立新
吴剑威, 唐立新
(合肥师范学院 电子信息工程学院,安徽 合肥230061)
1 引言
传统PID(比例积分微分,Proportion Integration Differentiation)控制算法简单、运行可靠、易于实现,对大多数被控对象可以实现无差控制,目前在工业中仍被广泛应用。但在被控对象数学模型发生变化时,参数调整极其困难[1,2],具有自适应能力差,超调量大等缺点,很难取得满意的控制效果。模糊控制算法(Fuzzy)不依赖被控对象的精确数学模型,对非线性、时变性系统具有较强的适应能力及良好的鲁棒性等优点,但其本质是非线性控制,模糊规则不易确定,存在稳态误差,控制精度不高[3]。
温度控制系统具有大惯性、纯滞后等特点,参数值及精确的系统模型很难得到。单一的模糊控制器和传统的PID控制器都无法满足其高性能要求,难以获得理性的控制效果[4]。为此,设计了一种模糊自适应PID控制器。仿真结果表明,系统具有响应速度快、超调量小等优点,在温度系统控制中能取得满意的效果。
2 温度控制系统的数学模型
温度控制系统是典型的非线性时变滞后系统,可用二阶惯性纯滞后环节来描述。而二阶系统,能够通过参数辨识降为一阶系统。因而,可用一阶惯性滞后环节来描述温控系统的数学模型。其传递函数为

式(1)中:k为放大系数;T为惯性环节时间参数;τ为纯滞后时间参数。
3 模糊自适应PID控制器的设计

图1 模糊自适应PID控制原理图
模糊自适应PID控制器[5,6]原理如图1所示,其本质是通过模糊控制规则实现PID控制器参数的在线调整。由图1可知,其输入变量为误差e(e=r(t)-c(t))和误差变化率ec(ec=de/dt),输出变量为kp,ki,kd。本文中各变量的模糊子集都是{NB负大,NM 负中,NS负小,ZO零,PS正小,PM 正中,PB正大}。模糊子集均采用论域为[-6,6]的三角形隶属度函数(如图2所示)。

图2 模糊控制器的隶属度函数图
PID 控制参数的整定原理为[7,8]:
(1)比例系数kp的作用在于加快系统的响应速度,提高系统调节精度。kp越大,系统的响应速度越快,调节精度越高,但易产生超调,甚至导致系统不稳定;而kp过小,会降低调节精度,减慢响应速度,使系统性能变坏。
(2)积分系数ki的作用在于消除系统的稳态误差。ki越大,系统的稳态误差消除越快,但ki过大,在响应过程的初期会产生积分饱和现象,引起响应过程的较大超调;ki过小,难以消除系统稳态误差,影响系统的调节精度。
(3)微分系数kd的作用在于改善系统的动态特性,但kd过大,不仅会延长调节时间,而且会降低系统的抗干扰能力。
根据以上规则并结合专家知识得出模糊控制器的控制规则如表1所示。

表1 模糊控制器的控制规则表
通过if-and-then方法进行模糊推理并采用重心法进行反模糊化运算后,可得PID控制器的三个参数为:式(2)中kp0,ki0,kd0是预先设定的参数值。

4 建模与仿真
为了验证所设计控制方法的合理性,通过Matlab中的Simulink工具箱建模,并对PID控制,Fuzzy控制以及FA-PID控制进行仿真比较,仿真模型分别如图3、4、5所示。
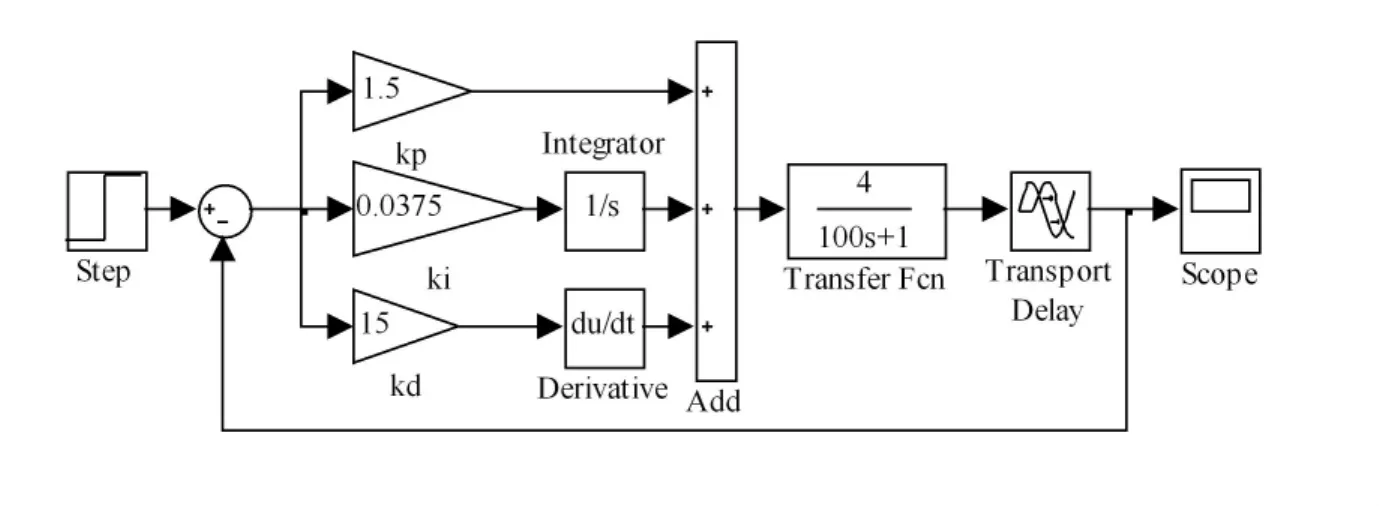
图3 PID控制仿真模型
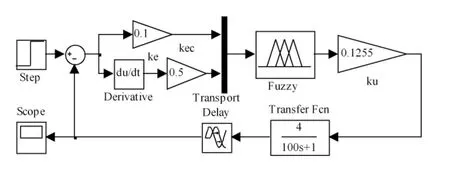
图4 Fuzzy控制仿真模型

图5 FA-PID控制仿真模型
通过参数辨识,取温度控制系统参数为:T=100,k=4,τ=20,设定值为1℃。PID控制采用ZN(Ziegler Nichols)参数整定法[9]。仿真结果如图6所示。

图6 三种控制算法仿真结果
5 结论
由图6可知,PID控制超调量为59.5%,调节时间为137秒;Fuzzy控制超调量为0,但调节时间为340秒;本文设计的FA-PID控制算法超调量仅为1.5%,调节时间仅为75秒。因而,对于滞后、非线性系统,FA-PID的控制效果明显优于其他两种算法。该算法不仅能实现PID控制和Fuzzy控制的优势互补,而且具有更好的适应性、稳定性和控制精度,对温度控制系统起到了良好的控制效果,是一种较为理想的控制方案。
[1]王海青,姬长英,刘同召等.模糊自整定PID温度控制系统的建模与仿真[J].计算机工程,2012,38(2):233-235.
[2]陈永庆.基于Z-N算法的PID炉温控制[J].大连交通大学学报,2008,29(2):50-53.
[3]陈云霞,姚舜.电子束快速成型温度自适应模糊PID控制系统[J].控制工程,2009,16(1):56-58.
[4]李颖冲,陈小强,王思明等.基于模糊自适应PID的陶瓷窑炉温度控制系统仿真[J].中国陶瓷,2009,45(7):51-54.
[5]刘经宇,尹文生,朱煜.模糊PID控制在纳米微动台系统中的应用[J].控制工程,2011,18(2):254-257.
[6]王平军,侯波.基于模糊PID的飞机防滑刹车系统动态仿真[J].计算机仿真2012,29(2):40-44.
[7]邓小龙,张建林,陆锦军等.纺织空调系统的模糊PID控制研究及应用[J].仪器仪表学报,2011,32(4):763-766.
[8]崔雅静,杜艳丽,王晓雷.自适应模糊PID控制器的设计[J].控制工程,2008,15(2):128-129.
[9]李国林.PID控制器参数整定技术研究与优化设计[D].大连:大连理工大学,2010:17-18.
