源侧电流检测的DSTATCOM控制策略
2012-09-20刘骥魏新劳徐在德赵东旭孙冰
刘骥, 魏新劳, 徐在德, 赵东旭, 孙冰
(1.哈尔滨理工大学电气与电子工程学院,黑龙江哈尔滨 150080;2.东北电网有限公司,辽宁沈阳 110006)
0 引言
随着我国国民经济的迅速发展,越来越多具有功率因数低、非线性、非对称性或冲击性等特点的工业用电设备或民用设备接入配电网中,这些负荷对电网构成了严重的无功和谐波污染,使配电网的动态电网电能质量日益下降,因此对配电网的电能质量进行有效控制和合理的无功补偿已势在必行。
配电网静止同步补偿器(distribution static synchronous compensator,DSTATCOM)可以对电网谐波电流以及无功进行补偿,实现对电网的净化,因而配电网静止同步补偿器已经成为解决电力系统电能质量问题的重要工具。
国内的配电网静止同步补偿器的电流检测算法主要是采用ip-iq法[1-2],也有些文献研究了交叉矢量法[3]、d -q 矢量变换[4]等控制策略,但都需要检测负载电流和补偿输出电流,精确计算补偿量。
近年来,国内也开始研究直接控制电源电流的控制策略,虽然给出了这种控制方法的基本原理,但都没有给出该方法的详细理论分析[5-6],尤其是在PI参数选择的方法原则以及理论依据方面尚未有文献报道。
国外虽然对这种方法给出了主回路的结构原理图以及控制算法的原理推导,但是都没有给出具体的 PI参数整定方法[7-8]。DSTATCOM 进行实时补偿时直流侧电容电压的稳定性控制目前大多采用PI控制方式[9-10],传统 PI控制其动态性能差,响应速度较慢,超调量较大,暂态过程中容易使电容击穿。
针对上述情况,本为提出更为实用的基于源侧电流检测的控制策略,不需要对谐波和无功进行检测,采用直接控制电源电流的方式,硬件简单化,实时性提高,降低成本。同时为了克服传统PI的缺点,本文直流侧电容电压的控制采用了自适应模糊控制器,具有较强的鲁棒性和适应性。自适应模糊PI控制器实现了PI参数的最优调整,进一步加强系统对不确定因素的适应性,它不依赖于系统精确的数学模型,具有很强的适应性。
本文首先给出了源侧电流直接控制的原理分析,并且在大量仿真的情况下总结了PI参数的选择方法,通过对PI控制和自适应模糊PI控制的直流侧电容电压进行动态的对比,分析采用自适应模糊PI控制器的系统的动态响应特性。同时,论文对采用本文控制策略的DSTATCOM进行了实验研究。
1 DSTATCOM源侧电流控制原理
本文提出的静止同步补偿器控制方案,采用直接控制电源电流的方式,与传统的DSTATCOM系统相比不需要实时的准确计算需要补偿的无功量,因此省去了复杂的无功和谐波检测单元和相应的硬件电路,其主回路电路接线原理如图1所示。

图1DSTATCOM主回路原理图Fig.1 Diagram of DSTATCOM main circuit
由图1可知,静止同步补偿器的主回路主要是由功率开关电路,输出电抗器,直流侧电容组成。开关采用IGBT,平波电抗器起连接电网和抑制谐波的作用,变流器通过输出电抗器与电网直接相连;直流侧电容起储能和稳定直流电压的作用。
设电源电流为is,负载电流为iL,则补偿电流ic应满足

采用直接源侧电流检测的DSTATCOM基本控制原理如图2所示。
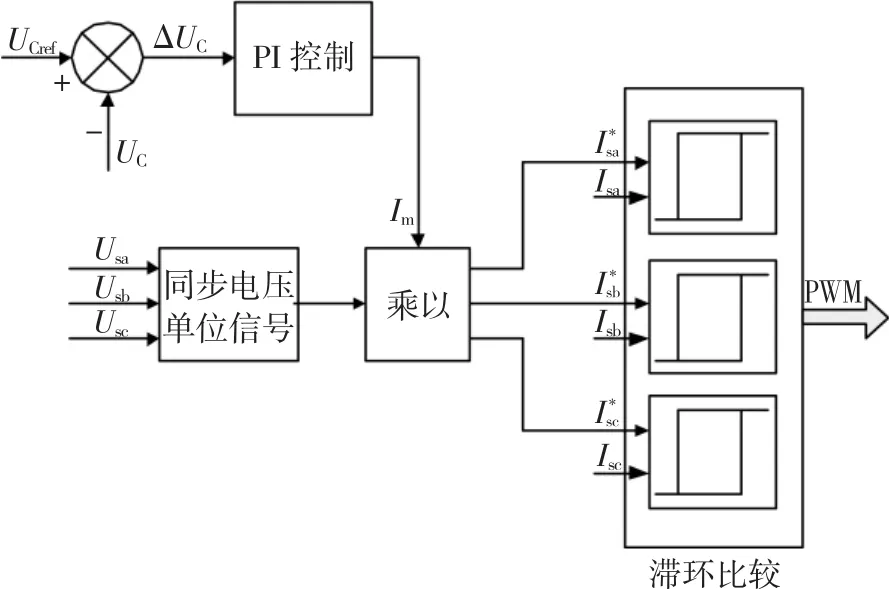
图2DSTATCOM控制系统结构图Fig.2 Scheme of DSTATCOM control system
由图2可知,采用直接控制电源电流的静止同步补偿器,补偿电流设定值的幅值Im是由直流侧电容电压的设定值与实际值的差值ΔUC,通过PI控制器调节后获得,补偿电流设定值的频率可通过检测三相电源电压,得到与系统电源Us同步的单位正弦信号就是PI控制器输出的Im和系统电源相位相同的单位正弦信号的乘积,然后补偿指令电流的设定值和电源电流的实际值is的差值Δis作为滞环比较的输入信号。
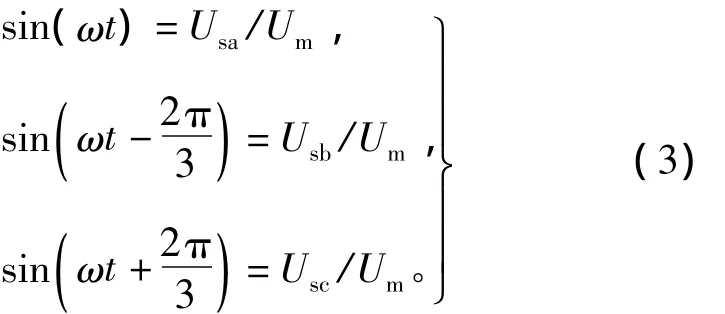
在图2中,三相电网电压为

其中Um为电压峰值。则单位三相正弦信号为
实际应用中,单位三相正弦信号可由控制器CPU中断子程序通过查表实现。
图2中Im为反映系统有功变化的有功电流,即

2 PI参数选择
直接控制电源电流方式的DSTATCOM,不需要检测无功电流,因为在DSTATCOM补偿无功的时候,直流侧电容和电网电流存在能量的交换。电容电压和电容电流的动态关系为

式中:u(0)为初始时刻的电压;iC(t)为电容电流;uC(t)为电容电压的实际值;UCref为设定电容电压。则有

根据能量平衡,直流侧电容充放电过程是由基波电流引起的,由式(6)可知通过PI调节后得到有功电流值Im为

对式(7)两边求导数,对于系统来说,有功电流都是常量,而Im为有功电流的幅值,所以此时Im为常数,因而求得导数为0,即
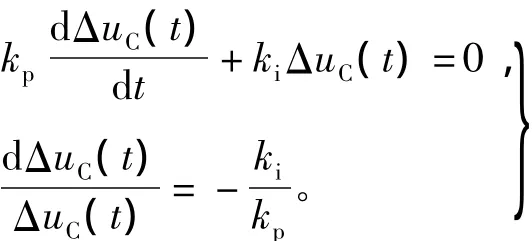
解得

式中A为常数。
当t趋近于无穷大时,ΔuC无限趋近于零。由此可见,直接控制电源电流的DSTATCOM直流侧电容电压都能够达到稳定,所以证明了此种控制方案的可行性。
同时,从式(8)结果分析还可以得到:
1)当ki/kp<1时,根据式(8)可知,ΔuC趋近于0的时间变长,衰减速度较慢,因而对于快速补偿系统来说是不满足要求的。
2)当ki/kp>1时,根据式(8)可知,ΔuC趋近于0的时间变短,衰减速度较快。理论上来说,ki/kp越大则衰减速度越快,但是因为受功率器件开关速度以及采样速度的限制,ki/kp也不能太大,如果太大会引起系统的不稳定。
由式(7)可知直流侧电容电压的变化,直接影响到有功电流Im,其中

由式(9)的进一步推断可知在电容大小确定的情况下,电容电流的大小最终决定了有功电流Im,由此推断电容电流和有功电流Im存在线性关系,即

按照上面的推断,进行了大量仿真,证明只要电容容量C和PI参数固定的情况下,在改变负载的情况下,电容电流都是随着有功电流Im不断变化,从而在仿真中不断改变负载R、L值的情况下得到图3,由图3发现k'p的值除负载电流极大(即R、L值较小)情况下,基本上都在0.15~0.45之间,由此可知,k'p存在一定的线性关系。而k'p主要是PI参数中的k'p起作用,所以可以认为kp=k'p,而积分系数ki可以消除静态误差,在本系统中ki的要求不是很严格,理论仿真研究发现,ki取值范围在ki<100的情况下都可以。

图3 对于不同负载得到的k'p的值Fig.3 The value of k'pobtained form different load
由式(4)可得到有功电流的参考值、、,各相系统电流为isa、isb、isc,由此可得无功电流参考值为
而系统电流和直流侧电压形成了闭环控制,这样通过PI调节之后可以得到较为准确的有功参考电流。
3 改进控制策略与模糊控制器设计
静止同步补偿器的电容电压稳定性直接决定了补偿的效果,因而直流侧电容电压的稳定性控制就显得尤为突出,传统上的普通PI调节控制电容电压的稳定,响应速度较慢,动态性能差。而自适应模糊PI系统是以常规PI控制为基础,采用模糊推理思想,将误差e和误差变化率eC作为模糊控制器的两个输入量,通过模糊控制器的输出变量,利用模糊规则实时对PI参数实时修整,从而达到PI参数的最优[11-12]。
对上述控制系统引入自适应模糊控制环节,得到改进的DSTATCOM控制系统如图4所示。
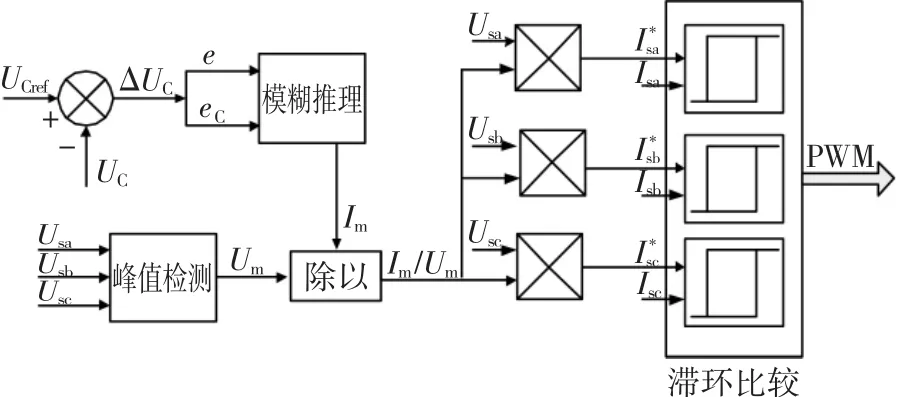
图4 改进的DSTATCOM控制系统结构Fig.4 Modified DSTATCOM control system
由图4可知,将图2所示原控制系统的直流侧电容电压的设定值与实际值的差值ΔUC引入自适应模糊PI控制器调节环节,然后将自适应模糊PI控制器输出的Im与系统电源相位相同的单位正弦信号相乘得到补偿指令电流的设定值,该值和电源电流的实际值is的差值Δis作为滞环比较的输入信号进行输出控制。
根据模糊控制原理对比例、积分系数2个参数进行实时修改,以满足不同e和eC对控制参数的不同要求,而使控制输出有良好的动、静态性能。首先根据前面分析确定k'p,k'i的值,此时然后通过模糊推理得到修正值Δkp,Δki,然后通过经验值和修正值得到最优kp和ki。图4中的模糊推理环节展开后如图5所示,可实现对PI参数的优化。
设比例、积分系数kp、ki为

式中:k'p,k'i为系统的经典 PI参数,Δk'p,Δk'i为模糊推理得到的调整值。根据PI的控制算式

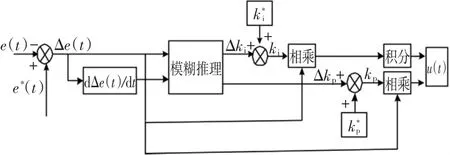
图5 自适应模糊PI控制结构Fig.5 Scheme of adaptive fuzzy PI control
设定输入变量e和eC的模糊子集为{负大,负中,负小,零,正小,正中,正大},并简记为{NB,NM,NS,Z,PS,PM,PB}7 种。同样输出变量kp、ki的模糊子集也为{NB,NM,NS,Z,PS,PM,PB}。根据参数kp、ki对系统输出特性的影响,可得出在不同的e和eC时,参数的整定原则:
1)当|e|很大时,不论误差变化趋势如何,都应考虑控制器的输出应按最大(或最小)输出,以达到迅速调整误差,使误差绝对值以最大速度减小。同时为了防止积分饱和,此时应取较大kp,较小的ki,其值可以取零。
2)当|e|和|eC|为中等大小时,为使系统响应的超调减小,kp,ki都不能取大,应该较小的ki,kp的取值大小要适中,以保证系统的响应速度。
3)|e|较小时,说明误差的绝对值朝减小的方向变化,或者已达到平衡状态。此时可采取保持控制器输出不变。
上述原则的模糊推理环节可以采用IF-THEN形式实现,可得 Δkp、Δki整定值:


当 E 分别为 NM、NS、Z、PS、PM、PB 时,kp、ki也各有7条规则共有49条规则。
图6为自适应模糊控制模块仿真图,其中K6、K7为ki、kp,K4、K5为模糊推理得到的修正值 Δkp、Δki,从而实时修整PI参数,其中K1、K2为两个输入变量的调节系数,可以根据输入量范围的变化,直接调节K1、K2的大小,这样不需要在模糊模块根据输入变量的范围重新确定e和eC的取值范围,提高了系统的适应性。
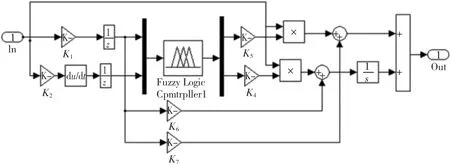
图6 自适应模糊控制仿真图Fig.6 Adaptive fuzzy control block
4 仿真验证
根据上述分析,对采用直接控制电源电流方式的静止同步补偿器在Matlab/SIMULINK环境下进行了仿真,其中仿真系统的基本参数为:系统电源电压为us=220 V;直流侧电容C=3 300 μF;电容电压的设定值为UCref=750 V;滞环比较器的环宽为1.0 A;负载侧R=1 Ω;L=2 mH;kp=0.2;ki=5.0。
系统在t=0.02 s时投入静止同步补偿器,图7(a)为投入前A相的电压电流曲线,图7(b)为投入静止同步补偿器后的A相的电压电流波形,通过对比可知,采用直接控制电源电流方式的DSTATCOM,无功补偿效果非常理想。
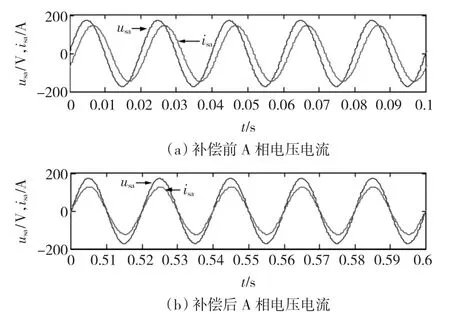
图7 电源电流控制的DSTATCOM的A相补偿结果Fig.7 Compensated results for A phase of DSTATCOM using source current control
图8为投入静止同步补偿器的三相电源电流和补偿电流过渡曲线,由曲线可知,电流没有大的波动,并且在投入后系统稳定速度较快。
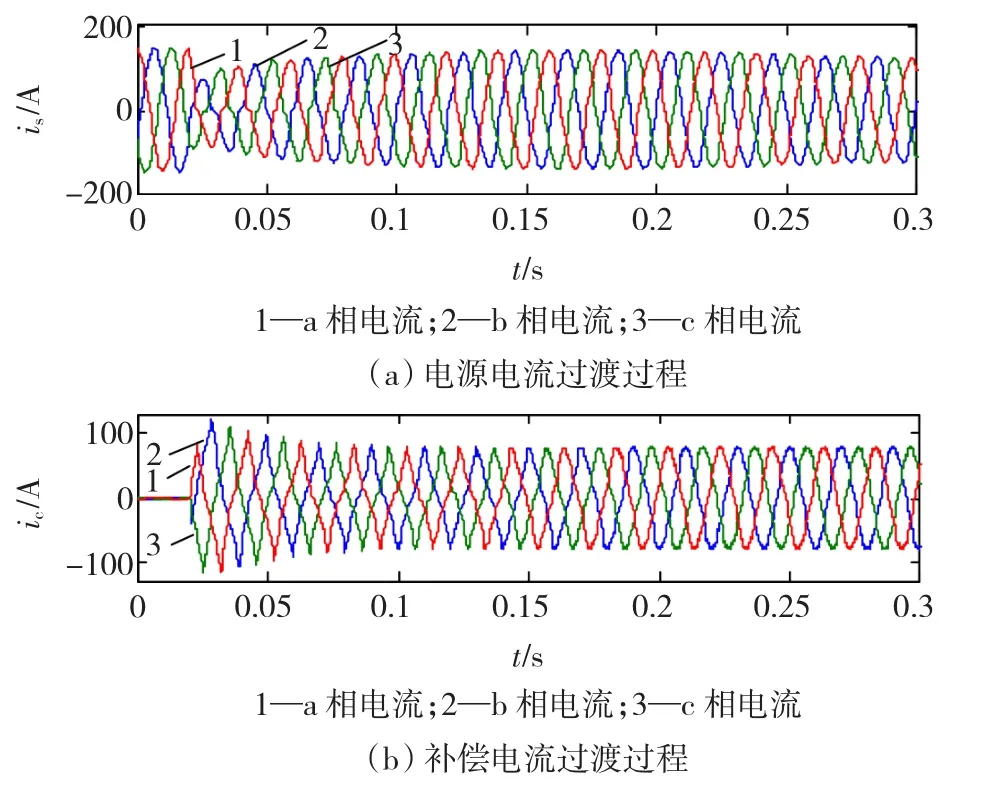
图8 电源电流控制的DSTATCOM过渡过程曲线Fig.8 Transient curves for three-phase of DSTATCOM using source current control
图9为直流侧电容电压的波动曲线,由图可知,采用一般PI调节,系统稳定到额定电压值750 V大概需要0.5 s,超调量大概在50 V左右,采用自适应模糊PI调节,系统稳定到额定电压值750 V大概需要0.2 s,超调量大概在20 V左右,并且基本上没有超调,电压波动不大,由此对比可知采用自适应模糊PI控制,系统的响应速度加快,超调量变小。

图9 两种控制方式下初始时刻电容电压的过渡过程Fig.9 Initial transition curves of capacitor voltage for two control mode
5 实验结果与分析
为了验证此种控制方案的可行性,按图1结构原理开发了一套针对此种控制方案的DSTATCOM实验样机,对其无功补偿效果进行验证。实验装置:系统直流侧电容C=3 300 μF;电容电压的设定值为UCref=120 V;负载L=13.8 mH;R=5.6 Ω;PI设定参数为kp=0.2;ki=5.0,实验结果分别采用FLUKE 434电能质量分析仪和TDS3014B示波器测量,如图10、图11所示。
由图10(a)和图10(b)的对比可知此种方法在实际实验应用中也是可行的,完全满足要求。通过功率因数补偿前后的对比可知,补偿前功率因数为0.8,含有较多的无功,补偿后功率因数为0.99,补偿了无功,并且基本上没有谐波产生。
图11为投入DSTATCOM后直流侧电容电压的过渡过程,通过曲线可知,系统经过约0.8 s达到稳态,之后电容电压一直比较稳定。
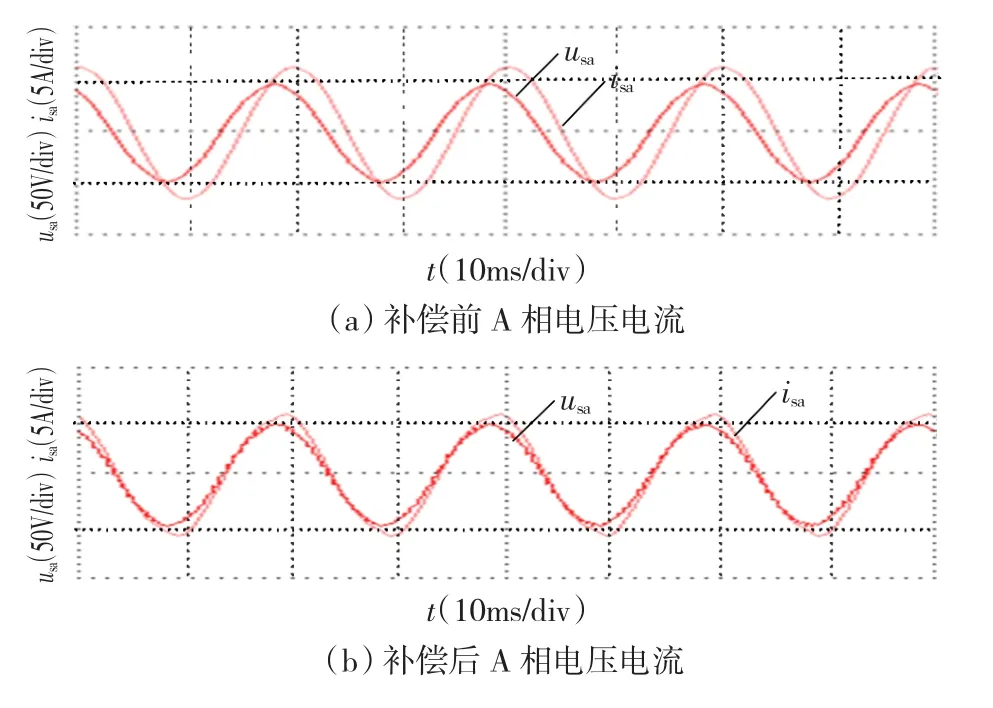
图10 电源电流控制的DSTATCOM的A相补偿试验Fig.10 Testing results for A phase of DSTATCOM using source current control

图11 直流侧电容电压测试曲线Fig.11 Test curve of capacitor voltage
6 结论
本文提出了一种单独控制电源侧电流的补偿控制算法,并对直流侧稳压问题进行了详细的分析,给出了控制直流侧电容电压稳定的PI参数整定详细过程,从本文理论研究与试验结果可以看出:
1)理论分析与试验表明,采用不检测无功电流而单独控制电源侧电流的控制模式,同样能达到理想的补偿效果,而且控制软件硬件实现更简单;
2)电流控制策略的PI参数整定过程可应用到实际装置中确定控制器比例、积分系数,具有理论参考价值;
3)对传统PI控制和自适应模糊PI控制的直流侧电容电压进行了动态的对比,表明采用自适应模糊PI控制器,系统的超调更小,响应速度更快。
通过仿真分析和实验样机的实验验证,证明采用该控制策略后,DSTATCOM的直流侧电压控制稳定,电源侧功率因数可达0.99。
[1]张定华,桂卫华,王卫安,等.混合动态无功补偿装置及其应用研究[J].电机与控制学报,2010,14(2):71-79.
ZHANG Dinghua,GUI Weihua,WANG Weian,et al.Mixed dynamic reactive power compensation equipment and application[J].Electric Machines and Control,2010,14(2):71 -79.
[2]陈庆国,赵春明.三相四线制并联型有源滤波器的算法和参数[J].电机与控制学报,2009,13(1):20-24.
CHEN Qingguo,ZHAO Chunming.Simulation of algorithm and parameters for shunt active power filter in three-phase and fourwire system[J].Electric Machines and Control,2009,13(1):20-24.
[3]陈东华,纪志成.适用于小容量独立电源系统的APF控制策略[J].电机与控制学报,2008,12(5):529-533.
CHEN Donghua,JI Zhicheng.Research on the control strategy of APF in independent power utilities[J].Electric Machines And Control,2008,12(5):529 -533.
[4]涂春鸣,李慧,唐杰,等.基于直接电流控制控制的DSTATCOM 装置研制[J].高电压技术,2008,34(6):1173-1178.
TU Chunming,LI Hui,TANG Jie,et al.Development of DSTATCOM based on direct current controller[J].High Voltage Engineering,2008,34(6):1173 -1178.
[5]王广柱.有源电力滤波器谐波和无功检测的不必要性讨论(一):理论分析和比较[J].电工技术学报,2007,22(1):137-141.
WANG Guangzhu.An investigation on the unnecessary of harmonic and reactive current detection for active power filter(part I)--theoretical analysis and comparison[J].Transactions of China Electrotechnical Society,2007,22(1):137 -141.
[6]何娜,武键,徐殿国.有源电力滤波器直流电压的模糊控制[J].电网技术,2006,30(14):45-48.
HE Na,WU Jian,XU Dianguo.Fuzzy control of DC voltage in active power filter[J].Power System Technology,2006,30(14):45-48.
[7]BHENDE C N,MISHRA S,JAIN S K.TS-fuzzy-controlled active power filter for load compensatin[J].IEEE Transactions on Power Delivery,2006,21(3):1459 -1465.
[8]MISHRA S,BHENDE C N.Bacterial foraging technique-based optimized active power filter for load compensatin[J].IEEE Transactions on Power Delivery,2007,22(1):457-465.
[9]MISHRA M K,GHOSH A,JOSHI A.Operation of DSTATCOM in voltage control mode[J].IEEE Transactions on Power Delivery,2003,18(1):258-264.
[10]RAHMATI A,ABRISHAMIFAR A,ABIRI E.An DSTATCOM for compensating different abnormal line voltage and nonlinear load[C]//2006 IEEE International Conference on Industrial Technology,December 15 - 17,2006,Mumbai,India.2006:756-761.
[11]徐彬,杨丹,王旭,等.电压型PWM整流器模糊逻辑功率预测控制策略[J].电机与控制学报,2010,14(8):52-57.
XU Bin,YANG Dan,WANG Xu,et al.Predictive direct power control strategy based on fuzzylogic for voltage source PWM rectifier[J].Electric Machines and Control,2010,14(8):52 - 57.
[12]颜文旭,纪志成.三相有源电力滤波器的T-S模糊建模与控制[J].电机与控制学报,2010,14(11):92-99.
YAN Wenxu,JI Zhicheng.T-S fuzzy model and control for threephase shunt APF[J].Electric Machines and Control,2010,14(11):92-99.