旋转舞台控制系统的设计与应用
2012-09-19常学军
常学军
(国家大剧院 舞台技术部,北京 100031)
前言
当前的舞台演出中,导演为了提升演出质量和艺术效果,对演出场景变化的要求越来越复杂。传统舞台台面较为固定,并且造型、风格较单一,整体舞台技术水平较低,已不能满足当今流行的演出需要。而将PLC可编程控制器运动控制技术应用到舞台机械运动控制中,实现舞台的升降、平移、旋转、伸缩等运动动作,可使演出更加多姿多彩。
本文主要以旋转舞台控制系统的设计为例,阐述运用PLC控制技术在旋转舞台运动控制中的应用。
1 PLC可编程控制器简介
PLC(Programmable Logic Controller,可编程序逻辑控制器简称),是在传统的顺序控制器的基础上引入微电子技术、计算机技术、自动控制技术和通讯技术而形成的新型工业控制装置,目的是用来取代继电器,执行逻辑、计时、计数等顺序控制功能。PLC是一种数字运算操作的电子系统,专为工业环境应用而设计。它采用可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、计时、计数和算术运算等操作的指令,并通过数字量、模拟量的输入和输出,控制各种类型的机械和生产过程。PLC及其有关设备,都应按易于使工业控制系统形成整体和扩充功能的原则设计。
一般来说,PLC分为整体式和模块式两种,但它们的组成是相同的。整体式PLC由CPU模块、I/O模块、通信接口、电源等组成;模块式PLC由CPU模块、I/O模块、通信模块、电源模块、背板或机架等组成。无论哪种结构类型的PLC,都属于总线式开放型结构,其中I/O模块可按用户需要进行扩展与组合。结构如图1所示。

图1 PLC基本结构示意图
2 旋转舞台运动控制系统基本构成
旋转舞台运动控制系统主要由机械、电气、控制三大部分构成。
2.1 机械部分基本构成
旋转舞台是控制系统的主要控制对象。它主要由转盘台面、托盘及支架、传动轴、减速箱、导轮等构成。
旋转舞台台面要完成360°旋转,并能停在任意角度位置或绝对位置上。图2是旋转舞台机械结构示意图。
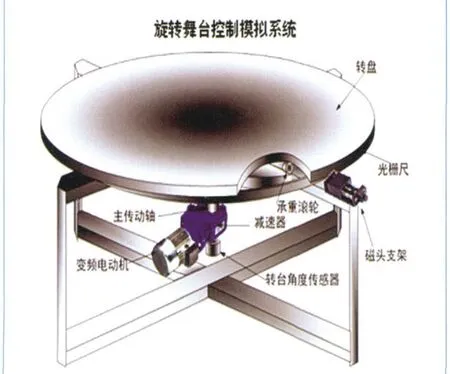
图2 旋转舞台机械结构示意图
2.2 电气控制部分构成
电气控制部分主要是旋转舞台运动控制系统中电路控制部分。它主要由变频器、异步电动机、断路器、电磁接触器、继电器、磁栅尺、磁头、信号放大器等组成。此部分主要完成硬件逻辑控制关系。虽然PLC的软继电器完成了控制回路中的大部分逻辑控制功能,但是还有一部分控制功能要由硬件电气元件完成。主要功能有以下几点:
(1)控制动力电源和制动电源的通断。如图3所示。

图3 动力电源和制动电源控制回路连接图
(2)构成就地控制回路。
(3)构成安全保护回路,如互联锁、紧急停机等。
(4)给PLC输入模块传送系统状态信号,如图4所示。

图4 PLC数字量输入线路图
2.2.1 位移测量系统构成及原理
在本例中,位移测量系统采用了日本Macome公司生产的MC位移测量系统。它由磁栅尺、磁头和信号放大器三部分构成。如图5所示。
如图6所示,磁栅尺的结构为厚0.3 mm、宽35 mm的不锈钢,其上粘有厚1.6 mm、宽20 mm的橡胶磁铁。橡胶磁铁的厚度方向20 mm的相等距离分布N极和S极相互吸引。
磁头和信号放大器共同构成信号感知器。磁栅尺上每10 mm间隔就有N极和S极磁场相互吸引磁化。信号感知器将磁场的量转变为A、B两相相应的信号,并通过连接信号放大器变为最高分解度为0.1 mm的脉冲信号。如图7所示。
磁栅尺安装于转台的边缘上,当磁栅尺与磁头之间有相对运动时(最大反应速度为10 m/s),磁头感知磁栅尺上N极和S极磁场的变化,通过信号放大器将磁场的变化转化为两相的脉冲信号,输出给分布式I/O的计数器模块FM-350。最终PLC的CPU根据计数器模块FM-350记录下来的脉冲数,并通过位移算法计算出位移量。

图5 MC位移测量系统构成
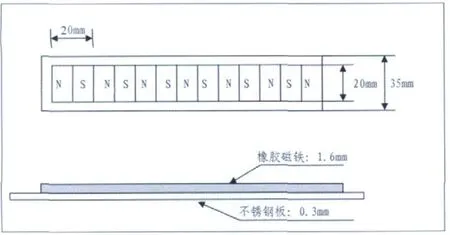
图6 磁栅尺结构

图7 信号放大器输出脉冲信号A相、B相
2.3 PLC控制部分基本构成
PLC控制部分作为控制的核心部分,主要由上位机(人机界面)、下位机(PLC控制模块)、分布式I/O从站(包括各模块)、通信网络等构成。
PLC控制部分是旋转舞台运动控制系统的核心部分,要完成对现场数据的采集、传输、处理、运动控制算法计算、报警信息处理、网络通信等功能。
本控制系统主要采用了西门子S7系列产品。上位机监控组态软件应用了WINCC V6.0,PLC硬件应用了S7-400系列产品,PLC软件部分采用西门子编程软件Step 7编写。
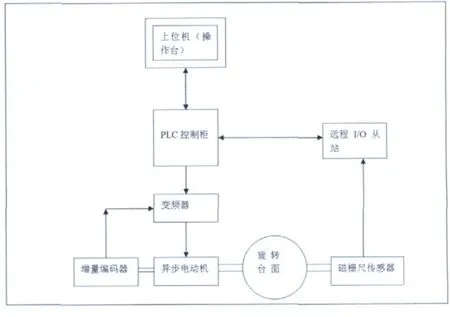
图8 基本控制原理图
3 旋转舞台运动控制系统工作原理
3.1 控制流程
假定旋转舞台处于0°,现以旋转舞台顺时针运动从0°到90°为例,说明旋转舞台运动控制系统的控制流程。如图8所示。
控制系统启动初始化完成后,如果没有报警出现,系统进入允许控制状态。
操作人员由上位机输入目标位置90°和目标运行速度50%(假定速度)指令,PLC的CPU接受位置和速度指令后,PLC首先判断系统状态,包括互联锁、紧急停机、变频器状态等,然后,CPU根据速度指令和加减速算法预先计算出一条加减速曲线,模拟量输出模块AO再将加减速曲线变换成对应的0~10 V模拟量值送给变频器,变频器收到模拟量值后输出一对应的频率值。不同的频率值会对应异步电动机不同的速度,也就是异步电动机变频调速的原理。公式如下:

式(1)中,
n ——异步电动机的转速,r/s(转/秒);
f ——异步电动机的频率,Hz;
s ——电动机的转差率;
p ——电动机的极对数。
变频器驱动异步电动机带动旋转台面做加减速运行。同时,信号感知器开始以脉冲计数的形式将脉冲信号传送给PLC。PLC根据脉冲值和位移算法计算出旋转台面所走过的角度,将此角度与指令90°进行比差,当它们之间的差值小于0.1°时,PLC 控制器发出停止信号给变频器,从而使转台停在90°的位置上。台面位置控制回路原理如图9所示。

图9 PLC位置闭环控制系统方框图

图10 远程控制框图

图11 就地控制框图
3.2 控制方式
旋转舞台运动控制系统的控制方式有远程控制和就地控制两种。
远程控制是从上位机(图形控制系统)发出位置、速度指令给PLC,再由PLC控制变频器,变频器再驱动转台达到预定的目标位置。现场控制是由电气控制柜控制按钮直接控制变频器驱动装置,现场控制的运行速度是非线性的,转台以某一固定速度运行到目标位置。如图10、图11所示。
3.3 上位机
上位机应用了西门子公司的组态软件WINCC V6.0来组态图形控制界面,它可以在PC机windows XP操作系统环境下运行。操作员通过图形控制界面对旋转舞台发指令给下位机(PLC)。通过上位机的图形控制界面很直观地监视旋转舞台当前的状态,包括位置、速度、报警信息、运行方向等信息。这些状态信息数据都是上位机从下位机(PLC)现场采集而来,上位机对这些数据处理后,在图形控制界面上显示,提供给操作员。图12所示为旋转舞台图形控制界面。

图12 旋转舞台控制系统图形控制界面
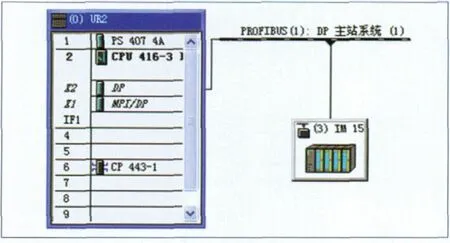
图13 PLC硬件组态图例
西门子WINCC软件是上位机的一种组态软件。它主要是完成项目的图形化监视界面的编辑、各种数据信息归档、监视过程变量的变化过程,与PLC进行通讯等功用。
3.4 下位机
下位机PLC主要完成旋转舞台控制系统的控制任务。本设计在硬件方面采用西门子S7-400系列。它主要由机架、背板、电源模块、CPU模块、通信模块等组成,如图13所示。电源模块、CPU模块、通信模块等都安装在机架的背板上。电源模块给机架背板上所有其他模块提供电源;CPU模块主要是执行内部的程序进行逻辑运算,并扫描外部输入输出点,按设计要求控制各个输出点,再由外部执行元件实施具体的动作;通信模块主要是完成与上位机或者是其他站点进行数据通讯的功用。
在PLC软件部分,本设计应用西门子STEP 7编程软件进行了旋转舞台控制系统的编程,编程语言采用梯形图编程。图14为梯形图编程部分程序。

图14 PLC编程示例
3.5 分布式I/O从站
旋转舞台控制系统的分布式I/O作为PLC主站的从站,主要是完成现场的数据采集,通过Profi bus-DP总线将采集的数据传送给PLC控制器。它由数字量输入模块(SM321)、数字量输出模块(SM322)、模拟量输出模块(SM332)、ET-200M和计数器模块FM350-1组成。如图15所示。

图15 本设计系统的分布式I/O从站构成图
3.6 系统的网络通信
旋转舞台控制系统的网络通信设计采用了工业以太网和Profi bus-DP现场总线的通信方式。如图16所示。

图16 本设计网络组态图
在本系统设计中,Ethernet工业以太网通信用来与上位机PC之间通信。Profibus-DP现场总线网络主要是与现场分布式I/O进行数据交换,实现了实时监控和控制。
4 旋转舞台控制系统的软件编程
在CPU模块中循环运行的是用户编写的程序。程序主要利用西门子STEP7 编程软件,根据旋转台控制设计思路编写而成。在编程语言方面主要有梯形图、语句表、功能块图三种编程语言。本例所采用的是梯形图编程。图17、图18为梯形图编程实例。
从程序内容上讲,主要分为逻辑控制部分和运动控制算法部分。所有的程序都在PLC一个循环扫描周期内执行。一个循环扫描过程周期分为输入采样、程序执行、输出刷新三个阶段。在这个扫描过程中,PLC将所有的输入信号进行分析处理,然后,将数据处理结果通过输出设备给外围执行机构。图19为PLC扫描循环的过程示意图。

图17 数字量输入程序段

图18 部分PLC主循环程序段

图19 PLC循环扫描工作过程
5 系统的安全保护
为保证人身安全与设备安全,本系统在设计上加入了安全保护功能。一是紧急停止保护方式;二是互联锁保护方式。
在旋转台运行期间,如有紧急情况发生时,即可按下紧急停止按钮,使PLC切断控制回路,变频器停止输出,设备停止运行。
互联锁保护,主要是当旋转舞台与其他设备有互联锁关系时,禁止转台运行,这样就保护了设备的安全。
6 结论
综上所述,在旋转舞台运动控制系统设计中应用西门子PLC集成控制系统,运用PLC定位对运动控制技术,很好地实现了对转台的角度和绝对位移控制。操作员从图形控制界面直接输入角度或绝对位移,即可对转台进行正转、反转的位置控制。这种设计给操作人员及导演带来了许多方便,也使舞台在演出中的变化更加丰富。
[1] 李全利. PLC运动控制技术应用设计与实践. 北京:机械工业出版社. 2009
[2] 刘华波,何文雪,王雪. 西门子S7-300/400PLC编程与应用. 北京:机械工业出版社, 2009
[3] 苏昆哲. 深入浅出西门子WinCC V6. 北京:北京航空航天大学出版社. 2004
[4] 吉顺平,孙承志,孙书芳,等. 西门子现场总线通信原理与应用. 北京:机械工业出版社. 2009
