基于非线性函数的非平稳盲源分离步长算法
2012-09-17李著成
李著成
(北京联合大学商务学院,北京 100025)
自然梯度算法是盲源分离的一种经典算法,但由于其固定步长的应用,造成了两个重要的算法性能指标收敛速度和稳态误差之间的矛盾。一般来说,大的步长收敛速度较快,但稳态误差较大;反之,小的步长收敛速度较慢,但稳态误差较小。特别在分离非平稳盲源时,这种矛盾会尤为明显[1-2]。
1 系统模型和算法公式
假设有n个相互统计独立的未知源信号s(t)=[s1(t),s2(t),…,sn(t)]T,t为离散时间,经过未知的传输信道A∈ Rm×n后得到m个观测信号x(t)=[x1(t),x2(t),…,xm(t)]T(通常情况下m≥n),写成矩阵形式为

盲源分离的任务是只根据观测信号x(t),通过某种学习算法得到的分离矩阵W∈Rn×m,使得

其中各分量之间尽可能地独立,依此将y(t)=[y1(t),y2(t),…,yn(t)]T作为对源信号的一个估计,若

式中:G为全局矩阵;I为n×n维单位矩阵。则y(t)=s(t),那么源信号得到彻底恢复[3]。
盲源分离的系统模型如图1所示。
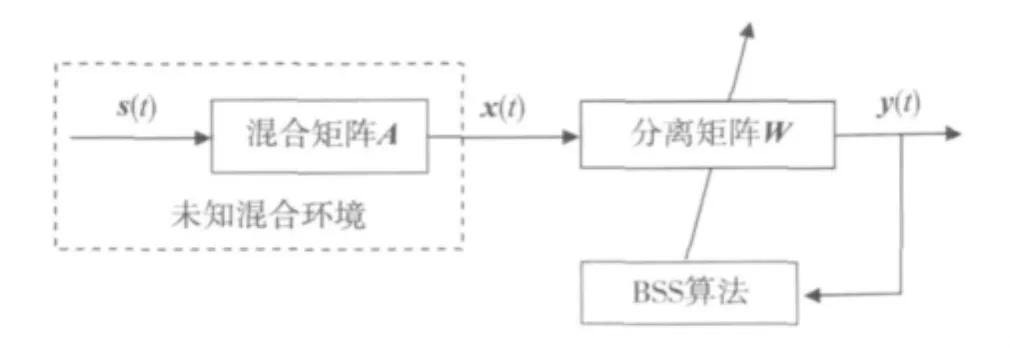
图1 盲源分离的系统模型
基于互信息(Mutual Information,MI)的自然梯度盲源分离算法[4]最早由 Amari,Cichoki等人提出,代价函数为
由表4主成分综合得分可知,各土壤样本养分含量由高到低的排列顺序为17→28→18→25→23→15→40→24→27→11→33→7→32→1→5→26→3→9→12→10→14→48→2→29→16→31→41→34→38→37→44→4→45→47→21→46→36→20→30→6→13→19→8→43→22→39→35→49→42。

式中:Pi(yi(t))为yi(t)的概率密度函数;det(·)表示矩阵的行列式。按照式(5)更新分离矩阵

式中:μ为步长因子;f(y(t))=[f1(y1(t)),f2(y2(t)),…,fn(yn(t))]T为估计信号y(t)的非线性函数,理想情况下有

式(4)对处理类似声音、语言、生物医学和机械振动等非平稳信号不是很理想,对其进行如下的修改[4-6]:
W(t+1)=W(t)+μ[Λ -f(y(t))yT(t)]W(t)(7)式中:Λ是一个对角阵,其元素为矩阵f(y(t))y(t)T对角线上的元素,即 Λ =diag[f(y(t))yT(t)](diag[·]表示由矩阵对角线元素构成的对角阵)。
2 基于非线性函数的步长算法
为了克服收敛速度和稳态误差之间的矛盾,考虑采用变步长的办法,使步长随着算法分离的实际情况做动态的变化,本文提出一种基于非线性函数的步长算法,通过某种误差的相关值e(t)e(t-1)去调节步长,表达式为

式中:e(t)是稳态误差;β>0和α>0为算法参数,这两个值的选择对算法性能会产生一定影响。
对于非平稳源信号,算法收敛后分离信号y应该满足[4]

式中:E[·]为数学期望。这意味着为了满足式(9),分离信号的幅度在算法执行过程中会不断自动调整。
假设

它的分量形式应满足

由此可以得到误差的一种表达式为

结合式(8)和式(12),新的变步长算法为
值得注意的是,μ(t)如果选择的太大,对算法的稳定性会造成较大的影响。因此,必须考虑步长μ(t)的上界

式中:μup(t)为μ(t)的上界。此时,μ(t)的取值为

如果步长不超过μup(t),则按照式(13)的步长,如果超过了μup(t),步长应选取为μ=μup(t)。
3 MATLAB仿真实验
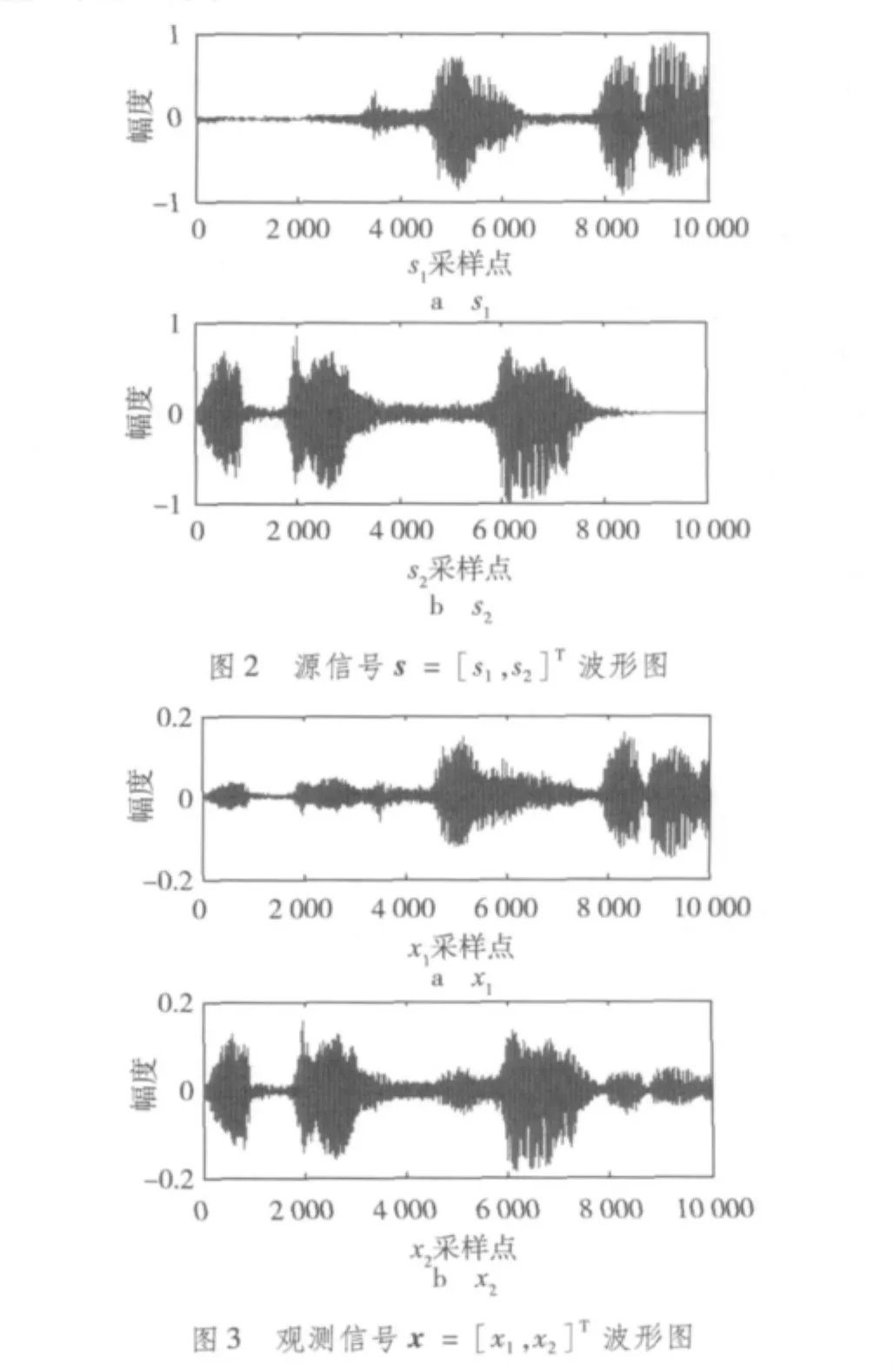
假设n=m=2,未知非平稳源信号s(t)=[s1(t),s2(t)]T为用Soundblaster卡采集的2路语音信号,其波形如图2所示,μ =0.006,β =0.05,α =3。图3为源信号经过随机混合矩阵A混合后生成的观测信号x(t)=[x1(t),x2(t)]T的波形图。图3与图2相比较,波形图发生了明显的改变。
为验证提出算法的有效性,分别用新旧两种算法对上述观察信号进行分离,分离效果通过盲源分离技术常用的一种算法评价指标——串音误差Cte(Cross-talk error)来鉴定,其表达式为
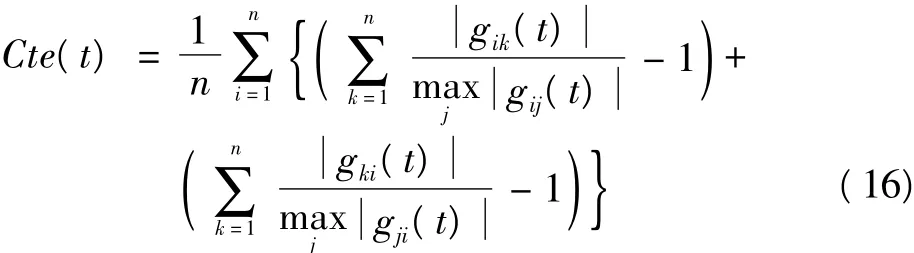
图4为经过新算法分离出的源信号的估计信号y(t)=[y1(t),y2(t)]T的波形图。将图4与图2进行比较,可直观地看出新算法已基本完成对源信号的恢复,y1对应于s1,幅度和相位发生了改变;y2对应于s2,相位没变但幅度发生了改变,这些改变是由盲源分离的不确定性决定的,在实际应用中,只要保持波形不变,这是完全可以接受的。图5是基于非线性函数的步长算法与固定步长算法的Cte比较图,表1为两种算法的更新次数与Cte的对应值。结合图5和表1可知,新算法与旧算法相比,分离效果有了明显改善,收敛速度较快而稳态误差较小,固定步长算法分离出源信号需更新200次左右,而新的自适应算法只需135次,收敛速度明显加快,而且此时新的步长算法的Cte=0.04,固定步长算法的Cte=0.08,可见稳态误差也有一定程度的改善。
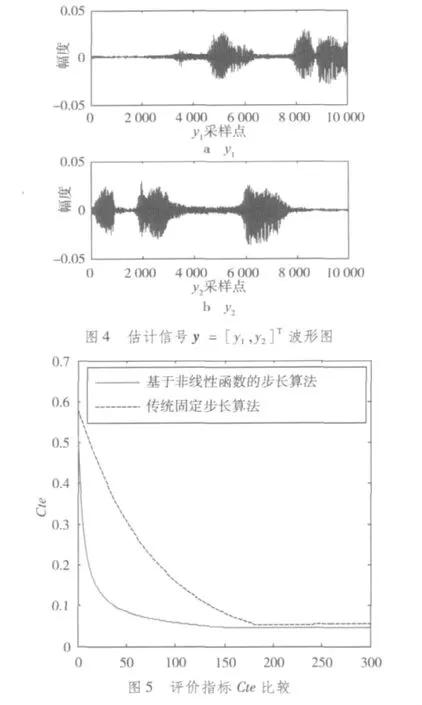
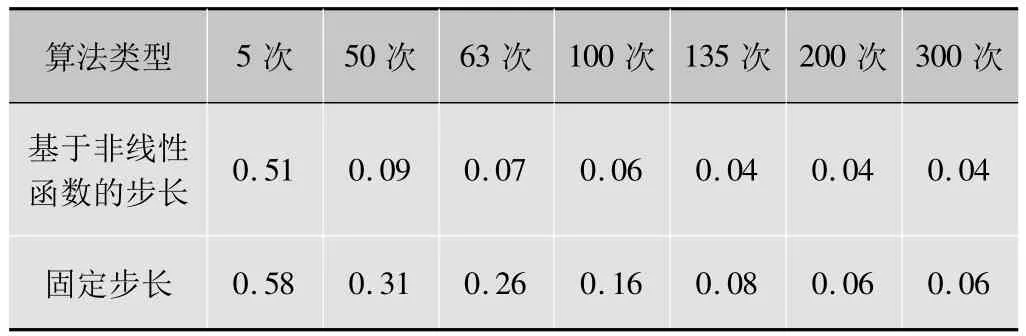
表1 两种算法的更新次数与Cte的对应值
关于式(13)中α和β值的选择,经过实验也发现了一定的规律。一般地,0<α<1,β>1,如果要求收敛速度快,就应选择一个较大的β值,如果要求稳态误差小,就应选择一个较小的α值,β影响全局而α影响局部。
4 小结
收敛速度和稳态误差一直是盲源分离算法研究的热点之一。本文在对自然梯度算法进行分析的基础上,提出了一种新的基于非线性函数的步长算法,在加快算法收敛速度的同时兼顾减小稳态误差,克服了传统固定步长算法的缺点,通过计算机仿真实验证明了该算法的有效性。
:
[1]NAKAJIMA H,NAKADAI K,HASEGAWA Y,et al.Adaptive step-size parameter control for real-world blind source separation[C]//Proc.IEEE International Conference on Acoustics,Speech and Signal Processing,2008.Las Vegas:IEEE Press,2008:149-152.
[2]OU Shifeng,GAO Ying,JIN Gang,et al.Variable step-size algorithm for blind source separation using a combination of two adaptive separation system[C]//Proc.15th International Conference on Natural Computation,2009.Tianjin,China:IEEE Press,2009:649-652.
[3]桑睿,吴杰.一种解决频域盲源分离模糊度问题的新方法[J].电视技术,2011,35(15):122-155.
[4]CICHOCKI A,AMARI S.Adaptive blind signal and image processing:learning algorithm and applications[M].New York:Wiley,2002.
[5]AMARI S,CICHOCKI A.Adaptive blind separation processing-neural network approaches[J].Proceedings of the IEEE,1998,86(10):2026-2048.
[6]ZHANG Kun,CHAN Laiwan.Convolutive blind source separation by efficient blind deconvolution and minimal filter distortion[J].Neurocomputing,2010,73(13/14/15):2580-2588.
