基于函数型数据分析技术的运动协调量化方法应用研究
2012-09-14林辉杰严波涛许崇高梁海丹
林辉杰,严波涛,许崇高,梁海丹
基于函数型数据分析技术的运动协调量化方法应用研究
林辉杰1,2,严波涛3,许崇高3,梁海丹1
对运动协调的研究是运动控制学科的重要组成部分,其主要目的在于探索中枢神经系统等元素对机体运动控制的作用及其机制。基于运动协调的概念,矩阵分解方法被长期应用于运动协调的量化中。然而,一些量化运动协调常用的矩阵分解方法中存在的问题也日益显露。在这些矩阵分解方法中,将运动自由度表示为一个向量,作为一个具有间断特征的数据集合进行处理,是不符合实际的。这使与中枢神经运动指令有关的参数也具有间断属性,与实际由其激活的具有连续性的运动自由度状态是有矛盾的。此外,它们的量化结果与一些运动协调相关的概念不相匹配,或者是未能展现出更加丰富的运动协调相关信息。这些对量化结果的理论解释有一定程度的影响。在这此运动协调的量化问题上,函数型主成分分析技术具有特有的优势。
运动协调;运动控制;函数型主成分分析;方法研究
1 前言
对生物体运动控制原理的探索是一个基础的、具有广泛应用前景研究领域,其研究成果不仅在于揭示生物体运动的奥秘,而且能应用于机器人运动的控制、运动障碍相关疾病以及运动损伤的诊断、人体以及假肢运动功效的评价等等实用性研究领域。生物体运动协调的规律与特征是生物体运动控制原理的一个重要组成部分,致力于阐述中枢神经系统等元素对庞大的生物体运动器官系统的组织,减少生物体运动时自身运动器官系统的冗余度。对生物体运动协调规律与特征的量化表示是运动协调研究中一个非常重要的问题。目前,矩阵分解方法被常用于量化复杂动作中多自由度间运动协调[35]。这些方法能较好地协调属性特征,常用的方法包括主成分分析、因子分析、非负矩阵分解、独立成分分析等。然而,这些方法在量化运动协调上均存在一定程度的局限性。近期,函数型主成分方法(fnctional pincipal component aalysis)的功能逐渐受到科学研究者的青睐,被应用于多个领域的研究中。与上述矩阵分解方法相比,函数型主成分析具有自身的独特性。本研究试图将函数型主成分分析方法应用至运动协调的量化中,探索其在量化运动协调中的功效以及优势,为运动协调的量化提供新工具。
2 运动协调的概念
协调意为各元素间配合得当的一种关系,它是存在人类社会以及自然界中非常普遍的一种现象,各种系统中均存在为了共同目标各元素间协同作用[7]。运动协调是运动过程中复杂生物体系统各元素中存在的协调现象。Bernstein等首次提出了运动协调问题,将运动协调作为一个学科的概念或是研究范畴提出[11]。他们认为,运动协调的核心问题是中枢神经系统如何使运动器官系统各元素间协调活动,从而使机体实现一种确定的运动[31,36]。因为,使生物体运动器官系统各元素按特定方式运动是非常不容易。该系统是由非常庞大的具有一个或多个独立运动属性的元素组成,包括多刚体、多关节以及数量众多的肌肉以及肌纤维等,其所包含自由度的数量远远超过了确定运动所需的参数,这使其完成特定运动时会存在非常庞大的冗余自由度。继此,运动协调被定义为对生物体运动器官系统组织的冗余自由度控制的过程,将其转化为一个可控系统[14,17]。
依据Bernstein等的理论,运动器官系统中具备一种由少量的、独立的、多个自由度聚合而成的控制单位(control units)而组成的结构[14],这些控制单位被称为运动协调元,各种运动协调元的组合形成了运动协调结构,从而使其冗余自由度得到约束。从他的分层控制理论中描述到,运动控制是分层次的,在高水平层次中,中枢神经系统向少量的运动协调元输出运动指令,在低水平层次中运动协调元将这些运动指令分解成各运动器官元素的运动信号,最后激发相应运动单位的活动[19]。通过运动协调元活动系数的调整,同一种运动协调元能够实现不同的运动任务,同一种任务也可以由不同的运动协调元来完成[11,21]。一些神经生理学的研究为运动协调元以及其低水平控制的存在提供了一些证据[6,24],例如,电刺激动物脊髓神经引发的运动模式,小脑、皮质运动区以及脊髓神经元的聚合式的结构以及分离与聚合的神经通路。
3 运动协调量化中存在的问题
依据运动协调的概念,对运动协调的量化就是通过少量的集合变量来表示各运动自由度间的关系[25,30,32]。相对相位角(relative phases)经常被用于量化表示两个运动自由度间的关系,广泛的应用于两个肢体间或是复杂动作的局部两个自由度间运动协调的研究[18]。相对相位角计算的方法种类较多,在周期性运动中常采用HKB模型进行计算,在非周期性运动中常采用图像位移法、时间序列法[5]等等。在采用动态系统理论对运动协调的研究中,常采用向量分析方法以及连续相对相位法来表计算相对相位角[5,20]。这类量化方法的优点在于能比较清晰地表示运动自由度间的关系,研究结果容易分析与解释。但是,它们只适用于量化两个运动自由度间的联系,无法展现出多运动自由度间整体的联系,毕竟,各运动自由度间处于相互联系之中[18]。
矩阵分解方法则适用于量化多运动自由度间的关系[15],能够展现蕴藏于其中的一个低维度的、多自由度聚合的、独立的结构,体现出运动协调的基本特征。量化多自由度间运动协调的常用矩阵分解方法有主成分分析(principal component analysis)、因子分析(Factor analysis)、非负矩阵分解(nonnegative matrix factorization)、独立成分分析(independent component analysis)等[35],这些方法具有相似的理论模型[35]:
在这些矩阵分解方法中,运动自由度被视为变量;主成分权重系数向量被视为运动协调元,表示了各运动自由度耦合(coupling)的程度;主成分得分被视为运动协调元的活动系数,代表了各种运动协调元参与的程度[34]。在一些研究中,也有将主成分的得分视为共同运动模式,反映了中枢神经系统输出的运动指令;主成分的权重系数向量被视为集合变量,反映了接收运动指令的基本元素[16,24]。目前,采用这些方法的研究是比较广泛的,涉及到跑、骑自行车、接触、投等各种基本运动,肢体、关节、肌肉等层面以及儿童、大学生、老年人、病人等各种研究群体。
但是,在这些方法中,均将运动自由度视为一个向量变量,意味着各时间点运动自由度状态间是间断的,这与实际不符。在特定动作中,运动自由度不该被视为一个阶段状态的集合,而是一个连续性过程。例如,在完成膝关节屈伸动作中,膝关节的屈伸运动是一个连续性过程,是由无限个时间点上的膝关节屈伸状态组成,将其表示为具有时间间隔的运动状态向量是不妥的。这些矩阵分解方法导致主成分得分也是一个向量变量,这意味着其所反映的中枢神经系统输出的运动指令也具有间断特性。那么,中枢神经系统输出的这种非连续性的运动指令怎么会产生实际中连续性的运动自由度呢?显然,这是存在矛盾的。因此,运动自由度应被视为一个函数变量[x(t)],共同运动模式也应被视为一个函数变量[C(t)],这样的量化处理更有利于运动协调理论的解释。
此外,在这些矩阵分解方法中,有些量化的结果不易于运动协调相关理论的解释,有些量化结果未能全面展示一些运动协调的特征。采用主成分分析与独立成分分析方法时,主成分的得分存在负值,这不易于专业的解释。因为,在实际中,有些运动自由度变量均为正值(例如,肌电、合成线位移与速度等),然而主成分的得分作为降维后独立变量的值出现负数是比较难解释的。此外,由于:

主成分的得分(Ci)被视为各运动协调元(Wn)对原始变量向量(M)的相对贡献,称之为各运动协调元的活动系数。从中可知,主成分得分的绝对值越高,其对应运动协调元的影响也越大,意味着其活动程度也越高。然而,在理论解释时,以标准化(采用均值加减标准差的方式)合成速度变量为例,速度主成分得分正值越高意味着此时速度值越大,但是,速度主成分得分负值绝对值越高则意味着此时速度值越小,后者与上述运动协调元活动系数的概念不匹配。另外,在采用非负矩阵分解方法时,主成分矩阵与权重系数矩阵中的数值均为正值,这使运动自由度间逆相协调不能被量化出来,然而,这是一种常见的、较重要的运动协调方式。
此外,这些常用的矩阵分解方法在技术层面也存在一些问题,例如,具有严格的理论假设,需要较大的样本量以及数据共线性的影响等等[4,13,24,26,]。
4 函数型主成分分析特点及量化运动协调的功效
函数型数据分析方法是统计方法中一个崭新的分支,最早由加拿大McGill大学的统计学教授J.O.Ramsey于1991年提出,其与Bristol大学的统计学教授B.W.Silverman一起建立了函数型数据分析方法体系[1]。函数型主成分分析是函数型数据分析的一种方法,即为对函数型变量矩阵进行降维[1]。其中,函数型数据则指以函数形式呈现的数据,具有因变量随自变量按特定形式变化的特征。函数型主成分分析的理论模型为[28]:

Xi(t)为第i个函数变量;cik为第i个函数变量函数变量在k主成分上的得分值;ξk(t)为在k主成分上权重函数;第εi是随机误差。
在函数型数据分析中,样本的观测值不是传统统计方法中离散型数值,而是一个带有过程性的数值[9]。这样在函数型主成分分析中,不是以传统的向量为单位,而是以函数为单位进行数据处理[29]。其特点有:1)这种方法将观测数值视为一个具有连续特性的整体,这使数据分析中的信息更加丰富[2,8];2)在此方法中,以观测值的内在结构而非外在形式作为基本单位,这有利于揭示更加深刻的信息[8];3)函数型数据主成分分析前提条件的约束很小[3];4)获得的结果易于专业的解释[10]。
函数型主成分分析方法能将运动自由度视为函数变量展开降维分析,最后所呈现的主成分也具有函数性质,这使运动控制指令与运动自由度都具备了连续性特征。在这种方法中,将运动自由度作为原始函数变量,将权重系数函数视为运动协调元的活动系数(共同运动模式),将主成分得分向量视为运动协调元(集合变量)。在理论解释中,同样以标准化合成速度为例,速度主成分权重值正值较高时,说明该主成分中速度值的上升幅度越大;当其负值绝对值较高时,意味着该主成分中速度值的下降幅度越大。这与运动协调元活动系数的概念比较一致。此外,在主成分得分向量中能展现出各种运动协调方式,包括逆时相协调。函数型数据分析中原始函数变量与主成分得分之间转换采用积分方法进行[12],这种非线性的处理方法比传统主成分分析方法中线性转化所获得的信息要丰富。
5 函数型主成分分析的基本原理
函数型主成分分析是将主成分分析方法应用至函数型数据的处理之中,其基本原理框架与传统主成分分析比较相似,在一些技术环节中应用了特殊方法处理。在函数型主成分分析中,将函数型变量集合降维成少数的综合性函数变量,这些综合性函数变量被称为主成分[3]。
主成分函数的计算主要是求解其权重系数函数(ξ(t))[10]。根据一些前提条件,通过代数方法推导后,主成分权重系数函数为原始函数变量协方差矩阵特征方程的特征函数。具体方程如下:
其中,v(s,t)为原始函数变量的协方差函数,λ为主成分的协方差矩阵,ξ(t)为特征函数。通过对上述矩阵的特征方程进行求解,可以计算出各主成分对应的特征值及其特征函数。主成分的加权权重系数函数即为以主成分特征值为权重的特征函数。具体计算公式如下:
最后,基于权重系数,就可以计算各原始函数变量[Xi(t)]在各主成分上的得分(c)。具体计算公式如下:
在函数型主成分分析方法中,主要的统计量包括特征值、贡献率、权重系数函数以及主成分的得分。其中,权重系数函数与主成分的得分是函数型主成分分析的两个重要统计指标,它们能够展现出所分析对像的一些重要特性,例如,曲线的类型或是重要的变化形式等[12]。权重系数函数反映了主成分对函数变量的影响程度,主成分得分则表示了各原始函数变量与主成分的一致程度。
6 函数型主成分分析在掷铁饼动作运动协调量化中的应用
铁饼技术复杂,同时需要在极限程度上展现爆发力,这使运动员在完成此技术过程中对肌肉-骨骼系统元素组织的要求较高。以往研究中,对这种类型动作运动协调特征,特别是针对优秀运动员的研究较少。这样的研究能够从这类技术以及优秀运动员群体中再为协调运动的一些理论假说提供证据。在实践中,能够揭示该动作中存在的运动协调的特征与规律,为该项目的在技术方面的科研攻关、教学与训练提供更深层次的理论视角以及评价指标。
运动协调元包括了肢体协调元、关节协调元、肌肉协调元以及运动单位协调元,这些运动协调元也处于一个分层结构中[23]。中枢神经系统将运动任务指令先输入至肢体运动协调元,再不断进行分解,依次通过关节、肌肉、运动单位协调元,最后激活运动单位的活动,通过关节力矩实现机体的运动[27]。关节中心速度是关节协调元层面的一个参数,这个参数中包含了与铁饼项目运动成绩相关的重要信息。本研究中,选取掷铁饼动作中15个人体环节点标准化合成速度参数,进行函数型主成分分析,初步展示此方法在量化运动协调中的应用。合成速度标准化公式如下:
x为标准化速度参数;p为速度参数为速度参数均值;σ为速度参数标准差。在函数型主成分分析中,首先,使用了基函数系统,将速度参数(xij)拟合成函数变量[xi(t)]。它能够拟合高度复杂的数据,对于相对复杂的数据所选择的基函数数量较多,对于具有一定规律性的数据可以使用较少的基函数拟合。本研究中,采用了4阶的B样条函数作为拟合的基函数,这种基函数对非周期性数据具有较强的拟合能力。采用了光滑参数(λ)以及光滑矩阵,对拟合函数的光滑度进行控制,防止过度拟合现象。光滑参数设置为10。图1显示了我国优秀女子铁饼运动员李艳凤在一次掷铁饼动作(成绩为67.80m)中,左脚尖、左踝、左膝、左髋、左肩、左肘、左腕、右脚尖、右踝、右膝、右髋、右肩、右肘、右腕、头15个环节点标准化合成速度函数变量在101个时间点上的取值。
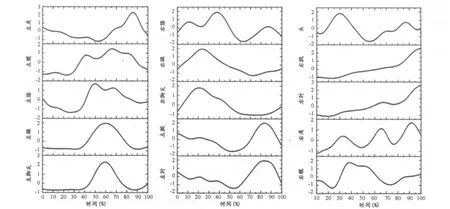
图1 掷铁饼动作中人体各关节点中心标准化速度曲线图Figure 1. Standardized Velocity Curves of Human Segment Points in Discus Throwing
随后,对标准化合成速度函数变量进行主成分分析。在掷铁饼动作中,前5个速度主成分的累积贡献率达到了98%(图2),这5个主成分基本上包含了15个原始函数变量全部信息。这说明,在掷铁饼动作中肌肉-骨骼系统中运动自由度间存在较强的共性关系,这些关系为运动协调元的组建提供了基础。通过运动协调元的建立能够简化中枢神经系统控制,是中枢神经系统活动的一种策略[22,27]。中枢神经系统通过向这5个运动协调元输出运动指令就能产生这15个自由度的运动。各个主成分的贡献率分别为47%、32%、10%、6%、3%,其实,前3个主成分已经达到了89%,它们也足够代表所有函数变量。
图2显示,在第一主成分中,左脚尖、左踝、左膝以及左髋的负值得分绝对值较大,右脚尖、右踝以、右膝以及头部的正值得分较高,说明第一主成分所反映的运动协调元侧重控制下肢以及头部的协调,主要涉及到左、右侧下肢的逆相协调,左侧下肢与头部的正相协调以及右侧与头部的逆相协调;在第二主成分中,上肢各环节点的得分均为负值,除了右肩得分绝对值偏低了些,其他上肢环节点的正值得分都比较高;下肢各环节点的得分均为正值,除了左髋外,其他下肢环节点上的正值得分都比较高,说明第二主成分所反映的运动协调元主要控制上、下肢的肢逆相协调,左、右侧上肢间以及下肢间的正相协调;在第三主成分中,左侧肢体环节点的得分均为正值,除了左髋的得分偏低了些,其它环节点的得分较高;除了右脚尖、右踝的得分较低且为正值外,右侧肢体其它环节点的得分均为绝对值较高的负值,说明第三主成分所反映的运动协调元主要控制左右则肢体的逆相协调;第四主成分中,除了左肩得分正值偏低些,左髋、右髋、右肩正值得分较高,说明第四主成分所反映的运动协调元主要控制两大腿的正相协调;除了左踝负值得分绝对值偏低了些,左脚尖、右脚尖、右踝、右肩、右肘、右腕的负值得分绝对值也较明显,说明此运动协调元还倾向于控制左、右足与右上肢的正相协调,大腿与足和上肢间的逆相协调。第五主成分主要涉及头、右髋以及左肩的活动,然而,其贡献率仅为3%,不足以表示一个运动协调元的活动。从中可以发现,在掷铁饼动作中,运动协调元主要侧重于对肢体间运动协调的控制,包括了下肢间、上下肢间、左右则肢体间的各种形式的协调;在小范围内对部分环节间的协调进行控制,包括两侧大腿间、两侧足、大腿与足间以及它们与右上肢间的协调。在主成分的得分中,负值得分绝对值越大,该函数变量与均值函数减去该主成分的权重函数曲线越相似;正值得分越大,则与均值函数加上该主成分的权重函数曲线越相似,反之亦然。
在掷铁饼动作中,这5个运动协调元的活动系数由主成分的权重系数函数来表示。它代表中枢神经系统控制运动协调元的运动指令,受到运动任务的影响[22]。图3显示了掷铁饼动作中这5个运动协调元活动系数函数,通过均值函数加减权重系数函数能较清晰地展现它们对函数变量变异性的影响区域。图4显示,在第一单支撑阶段中,各运动协调元的平均活动系数的排序依次为pc1、pc2、pc3、pc4、pc5;在腾空阶段中的排序依次为pc2、pc1、pc4、pc5、pc3;在第二单支撑阶段中的排序依次为pc1、pc2、pc3、pc4、pc5;在第二双支撑阶段中的排序依次为pc2、pc3、pc4、pc1、pc5。两个单支撑阶段各运动协调元活动系数的排序是一致,说明中枢神经系统输出的运动指令在这两个阶段上是比较相似的。

图2 掷铁饼动作中关节点速度参数各主成分的贡献率及其得分柱型图Figure 2. Main Component’s Percent of Captured Variance and Scores of Human Segment Points Standardized Velocity in Discus Throwing
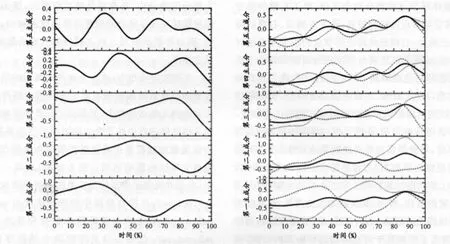
图3 掷铁饼动作中关节点速度参数各主成分的权重系数(左)及均值±权重系数(右)时间序列变化曲线图Figure 3. Main Component’s Weight Coefficient(Left)and Mean Velocity±Weight Coefficient(Right)of Human Segment Points Standardized Velocity in Discus Throwing
掷铁饼动作中,各主成分权重系数绝对值的均值与标准差表示了运动协调元整体作用程度以及作用模式。各主成分权重系数绝对值的均值越高,说明该时刻点上运动协调元整体对各自由度运动的作用较大,反之亦然。各主成分权重系数绝对值的标准差越大,表示该时刻点上以个别运动协调元主导作用的成分越高,反之则说明运动协调元同等作用的程度越高。图5显示,在第一单支撑阶段中部运动协调元的作用程度较高;在腾空阶段与第二单支撑阶段衔接附近运动协调元的作用程度较高;在第二双支撑阶段,铁饼出手前运动协调元的作用程度较高。中枢神经系统输出的运动指令与运动任务有较大的关系[33],在上述时间段中,运动协调元作用程度较高,说明此时自由度的运动对于完成掷铁饼动作具有较重要的作用。
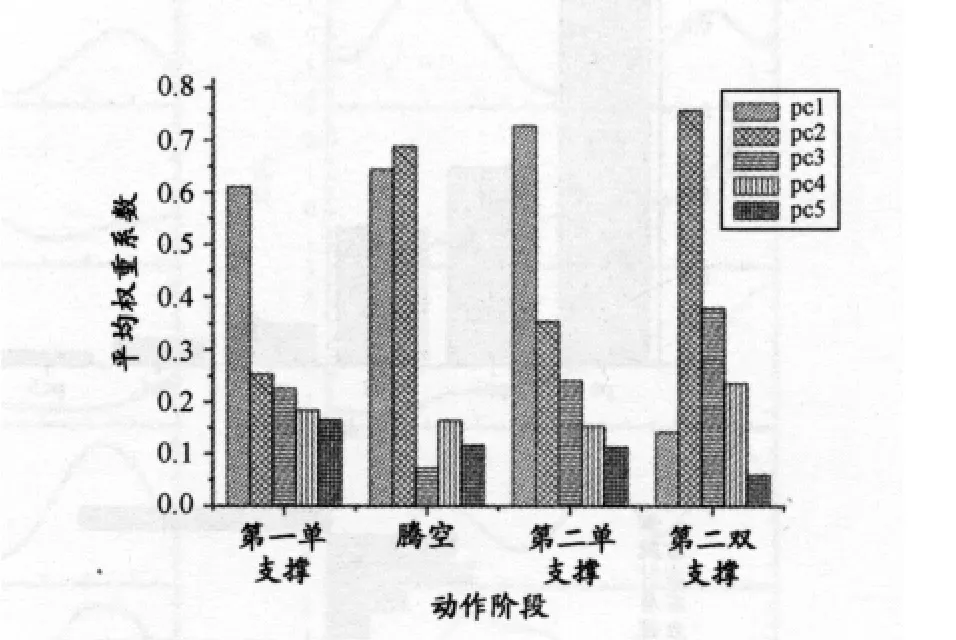
图4 掷铁饼动作阶段中权重系数绝对值柱型图Figure 4. Main Component’s Absolute Values of Weight Coefficient in Each Phase of Discus Throwing
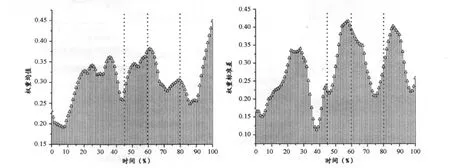
图5 掷铁饼动作关节点速度参数主成分的绝对权重系数均值(左)及标准差(右)时间序列变化曲线图Figure 5. Curve of the Main Component’s Mean Absolute Values of Weight Coefficient(Left)and Standard Deviation(Right)
图5显示,在掷铁饼动作中,运动协调元的作用模式呈现“波浪式”结构,在第一单支撑阶段、腾空与过渡阶段、第二双支撑阶段中各具有一个波峰,并在这三个阶段以及动作开始与结束时刻的衔接处均处于波谷,这说明,处于波峰时间段中倾向于个别运动协调元的作用为主,在波谷时间段中,倾向于运动协调元的同等作用为主。其解释为,各个协调元的活动均与特定的运动任务有关,在各个动作阶段中运动任务比较单一,然而,阶段间交替时各阶段的运动任务会交织在一起,体现出多运动任务并存。从中也发现,按常规划分的腾空与第二单支撑阶段在中枢神经的运动指令中并未将它们视为两个阶段,而是将它们视为一个整体,这体现出它们在动作目的上存在一致性,可能都是为最后用力动作做好准备。
7 总结与展望
矩阵分解方法是量化多自由度间运动协调的一种有效方法,为不同动作运动协调规律与特征的研究提供了方法学支持。目前,一些常用的量化运动协调矩阵分解方法已经广泛应用至各种类型的研究中。然而,这些方法在量化运动协调时不仅在技术层面存在一些问题,而且,它们的量化结果与若干运动协调概念不相匹配,或者是未能展现出更加丰富的运动协调相关信息。函数型主成分分析能有效地解决这些问题,此外,在应用时约束条件较少,不像一些常用的矩阵分解方法,需要满足一些严格的前提条件。本研究对函数型主成分分析方法在掷铁饼动作运动协调量化中的应用进行了初步探索,为该动作运动协调特征以及运动成绩影响因素的探索提供方法学指导。运动技术分析是运动生物力学一个重要应用领域,特别是针对竞技项目中优秀运动员的技术。目前,此领域相关研究集中于对运动技术的刚体力学、肌肉电特征与因素探索,较少涉及对中枢神经系统等控制层面元素的特征以及因素研究。利用运动协调量化方法以及相关理论可以在神经肌肉控制层面上展开广泛研究。
[1]丁晗.基于函数型数据分析的高中学习成绩评价与预测[D].东北师范大学硕士学位论文,2009.
[2]毛娟.隐含波动率的函数型数据分析[D].武汉理工大学硕士学位论文,2008.
[3]孟银凤,梁吉业,原曦曦.函数性数据分析中的主成分分析[J].山西大学学报(自然科学版),2011,34(1):21-25.
[4]雷福民,权德庆.主成分分析和因子分析在体育科学研究中应用方法的探析[J].西安体育学院学报,2008,25(4):34-38.
[5]林辉杰,严波涛,刘占锋,等.运动协调的定量方法以及在专项技术分析领域的研究进展[J].体育科学,2012,32(3):81-91.
[6]刘宇.生物力学在运动控制与协调研究中的应用[J].体育科学,2010,30(11):62-73.
[7]赫尔曼.哈肯.协同学——大自然构成的奥秘[M].凌复华译.上海:上海译文出版社,2005.
[8]靳刘蕊.函数性主成分分析的思想,方法及应用[J].统计与决策,2010,(1):15-18.
[9]曲爱丽.基于函数型数据分析的沪深权证市场研究[D].厦门大学硕士学位论文,2009.
[10]徐佳.函数性数据分析及其在证劵投资中的应用[D].浙江大学博士学位论文,2008.
[11]杨年峰.人体运动协调规律及其参数化描述[D].清华大学博士学位论文2001.
[12]岳敏,朱建平.基于函数型主成分的中国股市波动研究[J].统计与信息论坛,2009,24(3):52-56.
[13]张虎,刘吉甫.主成分分析方法用于系统评估的若干问题研究[J].统计与决策,2009,(13):13-15.
[14]BLACK D,RILEY M,MCCORD C.Synergies in intra-and interpersonal interlimb rhythmic coordination[J].Motor Control,2007,11(4):348.
[15]BOCKEM HL T,TROJE N F,D¨1RR V.Inter-joint coupling and joint angle synergies of human catching movements[J].Human Move Sci,2010,29(1):73-93.
[16]CAPPELLINI G,IVANENKO Y P,POPPELE R E,et al.Motor patterns in human walking and running[J].J Neurophysiol,2006,95(6):3426-3347.
[17]DAVIDS K,LEES A,BURWITZ L.Understanding and measuring coordination and control in kicking skills in soccer:Implications for talent identification and skill acquisition[J].J Sports Sci,2000,18(9):703-714.
[18]FORNER-CORDERO A,LEVIN O,LI Y,et al.Principal component analysis of complex multijoint coordinative movements[J].Biological Cybernetics,2005,93(1):63-78.
[19]FRÉDÉRIC DANION,MARK L.LATASH.Motor Control:Theories,Experiments,and Applications[M].Oxford University Press,2010.
[20]HADDAD J,VAN EMMERIK R,WHEAT J,et al.Relative phase coordination analysis in the assessment of dynamic gait symmetry[J].J Appl Biomechanics,2010,26(1):109.
[21]HEIDERSCHEIT B.Movement variability as a clinical measure for locomotion[J].J Appl Biomechanics,2000,16(4):419-427.
[22]HUG F,TURPIN N A,COUTURIER A,et al.Consistency of muscle synergies during pedaling across different mechanical constraints[J].J Neurophysiol,2011,106(1):91-103.
[23]LATASH M L,GORNIAK S,ZATSIORSKY V M.Hierarchies of synergies in human movements[J].Kinesiol 2008,40(1):29-38.
[24]LATASH M L,SCHOLZ J P,SCHONER G.Toward a new theory of motor synergies[J].Motor Control,2007,11(3):276.
[25]LI L,VAN DEN BOGERT E C H,CALDWELL G E,et al.Coordination patterns of walking and running at similar speed and stride frequency[J].Human Move Sci,1999,18(1):67-85.
[26]LI Z M.Functional degrees of freedom[J].Motor Control,2006,10(4):301.
[27]MARK L.LATASH.Synergy[M].Oxford University Press,2008.
[28]RAMSAY J O.Functional data analysis[M].Wiley Online Library,2006.
[29]RYAN W,HARRISON A,HAYES K.Functional data analysis of knee joint kinematics in the vertical jump[J].Sports Biomechanics,2006,5(1):121-138.
[30]SCHOLZ J P.Organizational principles for the coordination of lifting[J].Human Movement Sci,1993,12(5):537-576.
[31]SCHONER G,KELSO J.Dynamic pattern generation in behavioral and neural systems[J].Sci,1988,239(4847):1513.
[32]TEMPRADO J,DELLA-GRASTA M,FARRELL M,et al.A novice-expert comparison of(intra-limb)coordination subser-ving the volleyball serve[J].Human Move Sci,1997,16(5):653-676.
[33]TING L H,MCKAY J L.Neuromechanics of muscle synergies for posture and movement[J].Current Opinion Neurobiol,2007,17(6):622-28.
[34]TORRES-OVIEDO G,TING L H.Muscle synergies characterizing human postural responses[J].J Neurophysiol,2007,98(4):2144-2156.
[35]TRESCH M C,CHEUNG V C K,D'AVELLA A.Matrix factorization algorithms for the identification of muscle synergies:evaluation on simulated and experimental data sets[J].J Neurophysiol,2006,95(4):2199-2212.
[36]VAN SOEST A,VAN GALEN G.Coordination of multi-joint movements:An introduction to emerging views[J].Human Move Sci,1995,14(4-5):391-400.
Applied Research on Quantitative Method of Motor Coordination Basing on Functional Data Analysis Technique
LIN Hui-jie1,2,YAN Bo-tao3,XU Chong-gao3,LIANG Hai-dan1
The research of motor coordination is an important part in the field of motor control,which has the purpose to explore the factors and mechanism of Multi-Degree-of-Freedom(DOF)System’s control.Base on existing theories,matrix factorization algorithms are used to quantify the concepts of motor coordination for long time.However,the defect of those methods of quantifying motor coordination has emerged.Viewing the movement of Degree-of-Freedom as vector,the data collection with a characteristic of interval,in these methods is not in accord with reality.It is also paradoxical that the interval output of central nervous system’s command generates the coherent DOF movement in reality.Therefore,the results of those quantitative methods are disaccording with few concepts of motor coordination,or can’t show some in formations of motor coordination.It would influence the interpretation of those results.Function principle component method has a peculiar function to deal with those problems of quantifying motor coordination.
motorcoordination;motorcontrol;functionprinciplecomponent;methodology
G804.6
A
1000-677X(2012)09-0081-07
2012-07-26;
2012-08-30
国家体育总局重点实验室项目(2011B025);上海体育学院研究生教育基金项目(yjscx2012013)。
林辉杰(1982﹣),男,浙江奉化人,讲师,硕士,在读博士研究生,主要研究方向为运动生物力学,E-mail:linhj@tzc.edu.cn;严波涛(1961﹣),男,陕西户县人,教授,博士,博士研究生导师,主要研究方向为运动生物力学,Tel:(029)88409490,E-mail:yanbotao2004@hotmail.com;许崇高(1952﹣),男,山东荣城人,教授,硕士研究生导师,主要研究方向为田径教学与训练,运动技能学习与儿童动作发展;梁海丹(1982﹣),女,浙江乐清人,讲师,硕士,主要研究方向为运动技术的测量与分析。
1.台州学院体育学院,浙江临海317000;2.上海体育学院研究生部,上海200438;3.西安体育学院,陕西西安710068 1.Taizhou University,Linhai 317000,China;2.Shanghai University of Sport,Shanghai 200438,China;3.Xian U-niversity of Sport,Xi’an 710068,China.
