基于矿井提升机的自适应模糊PID控制器研究
2012-09-12孙丽军
孙丽军
(山西大同煤炭集团公司忻州窑矿机电科,山西大同 037021)
基于矿井提升机的自适应模糊PID控制器研究
孙丽军
(山西大同煤炭集团公司忻州窑矿机电科,山西大同 037021)
针对矿井提升机的变频调速系统的速度跟踪问题,研究了一种自适应模糊PID控制器,根据速度和速度变化量的需要随时调节PID参数。通过Matlab仿真表明,该自适应控制器既具有典型PID控制器高精度的优点,又具有模糊控制器快速、适应性强、可靠性高的特点,为矿井提升机系统提供了可行的方案。
矿井提升机;速度跟踪系统;模糊控制;PID
矿井提升机主要用于矿山煤炭提升、下放物料、设备,人员等。矿井提升机系统的结构见图1。
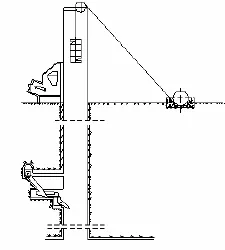
图1 矿井提升系统结构图
目前我国煤矿的矿井提升系统采用的调速方式主要有两种:晶闸管串级调速方式和转子串电阻调速方式。晶闸管串级调速方式的缺点是功率因数偏低,转子串电阻调速方式的缺点是耗能较大,占地面积偏大,所以它们均不能满足需要。有必要对其调速方式进行改造。其中,发展不足几十年的变频调速技术取得了一定进步,它的优点是节省能源、可以平滑地调节转速和调节速度的范围较宽等。因此,将变频调速技术应用到矿井提升机系统是一种理想的方案。随着生产力的发展,对供电电压的要求越来越高,所以需要采用高压大容量变频器以满足要求。目前,高压大容量变频器的开发技术难度比较大,而成品的造价很高,不容易推广使用。针对现状,考查了现行的变频调速方案,在高-低-高方式的基础上摒弃掉低-高环节,而采用高-低压变频方式,此外,将单片机外围电路与变频器结合构成速度闭环控制系统。在速度跟踪问题上,采用智能控制方式之一的自适应模糊PID控制策略,通过Matlab仿真表明该策略的正确性、有效性和可靠性。
1 自适应模糊PID控制器的选择

其中:e(k)为PID控制器的输入量;u(k)为PID控制器的输出量;Kp,Ki,Kd分别为比例系数、积分系数和微分系数。典型PID控制器的缺点是仅可应用于线性控制系统,对非线性控制系统不适用,而且如果没有建立被控对象精确的数学模型,典型的PID控制也不适用。
常规模糊控制器也就是PD(比例微分)控制器,它没有积分环节,因此仅应用常规模糊控制器无法消除系统的稳态误差,也没有PID控制的控制精度高。常规模糊控制器把速度信号转化为论域上的整数值[1],即:

式中,b为速度信号转化到论域上的整数值;e*为某时刻输入的速度;ke为速度量化因子。
当b=0时,系统进入稳定状态时有:
典型数字式PID控制算法的形式为:

假设速度实际变化范围为{-e,e},速度的模糊论域如下:{-n,-n-1,…,-1,0,1,…,n-1,n}。把速度量化因子代入(3)式中可得:

当n值不断增大时,常规模糊控制器的控制精度就会明显提高,但是控制器中模糊语言值相应的增加就容易使得控制规则更为复杂,因此,一般规范化的模糊论域形式常常取n=6,即有:

综上所述,模糊控制器对|e*|〈7%e的稳态误差没有办法消除。
因此,对于矿井提升机这样的复杂非线性系统,只采用典型PID控制或常规模糊控制都不能达到满意的效果。以典型PID控制为基础,采用模糊推理思想根据不同的速度e和速度变化量Kc对PID参数进行在线整定,即设计一种自适应模糊PID控制器,其原理[2]见图2。

图2 模糊自适应PID控制器原理图
2 PID参数在线调节的规则
自适应模糊PID控制器的目的是随着速度e和速度变化量e c的变化自动调节参数Kp,Ki,Kd,因此应该建立它们之间的模糊关系。根据专家经验,比例系数Kp、积分系数Ki、微分系数Kd在不同的速度e和速度变化量e c下的自我调节需要满足下述规律[3]:
1)当速度|e|比较大时,应该选择比较大的Kp、比较小的Kd(以便加快系统响应)且使Ki=0(去掉积分作用以避免较大的超调);
2)当速度|e|中等时,应该选择较小的Kp(以使超调量减小),适当的Ki和Kd(尤其是Kd的取值对系统产生较大响应);
3)当速度|e|比较小时,应该选择比较大的Kp和Ki(以使系统得到好的稳态性能),Kd的取值也要合适,才可以避免在平衡点附近出现振荡。
3 模糊控制器的设计
3.1 模糊语言变量及其隶属函数的选择
假设模糊控制器的输入量分别为速度e和速度变化率e c,e和e c经模糊化处理可以得到模糊语言变量,它们分别为E和Kc,E和Kc的模糊子集均为{NB,NM,NS,Z,PS,PM,PB}。输出量比例系数Kp、积分系数Ki、微分系数Kd的模糊子集均为{NB,NM,NS,Z,PS,PM,PB}。其中,NB,NM,NS,Z,PS,PM,PB分别代表正大、正中、正小、零、负小、负中、负大。选择模糊语言变量E,Ec和Kp,Ki,Kd的论域都为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},并假设E,Ec,Kp,Ki,Kd都服从三角形隶属函数曲线分布[4],见图3。
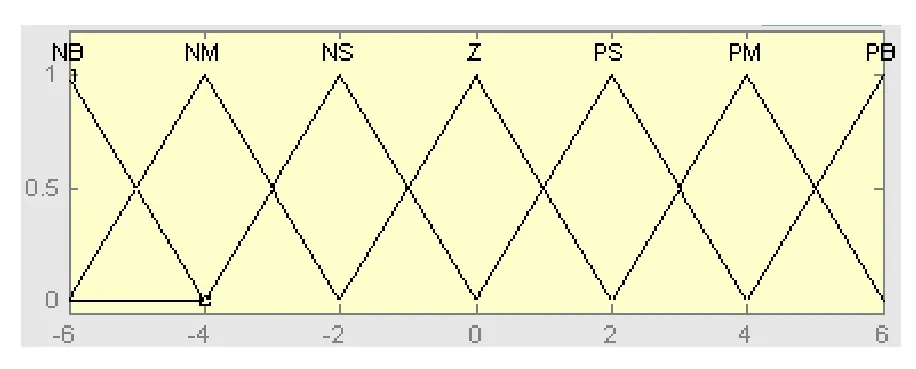
图3 E,Ec和Kp,Ki,Kd的隶属函数曲线
3.2 PID参数自我调节规则表
为了使PID参数(Kp,Ki,Kd)根据E和Ec,的变化进行自我调节,需要找出它们的对应关系,根据经验,可得针对Kp,Ki,Kd三个参数分别自我调节的模糊控制规则表[5],如表1,2,3所示。
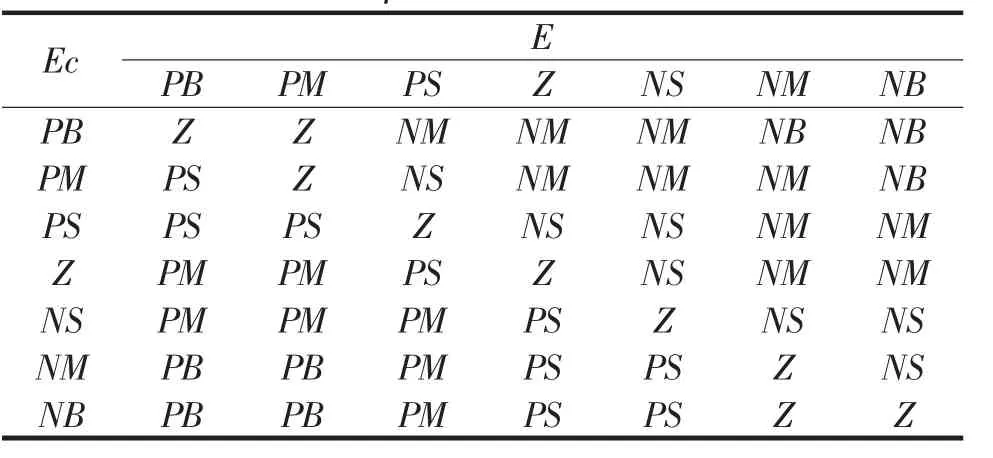
表1 Kp的模糊控制规则表
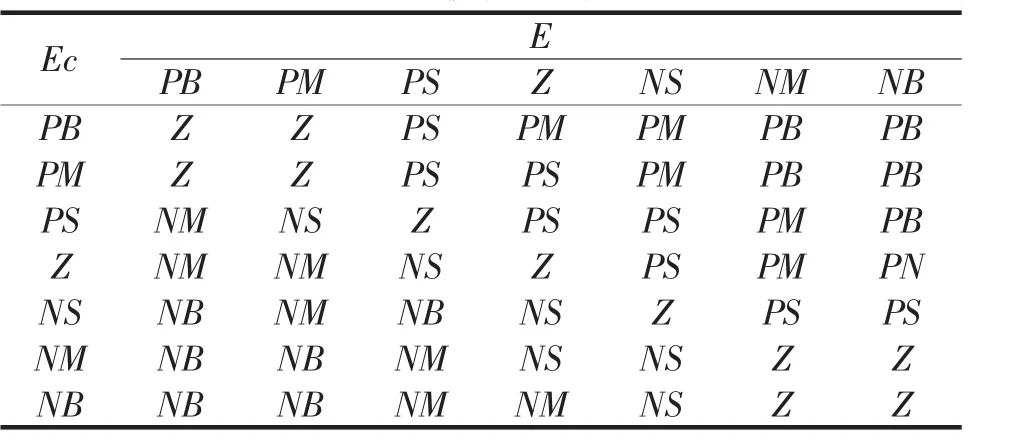
表2 Ki的模糊控制规则表
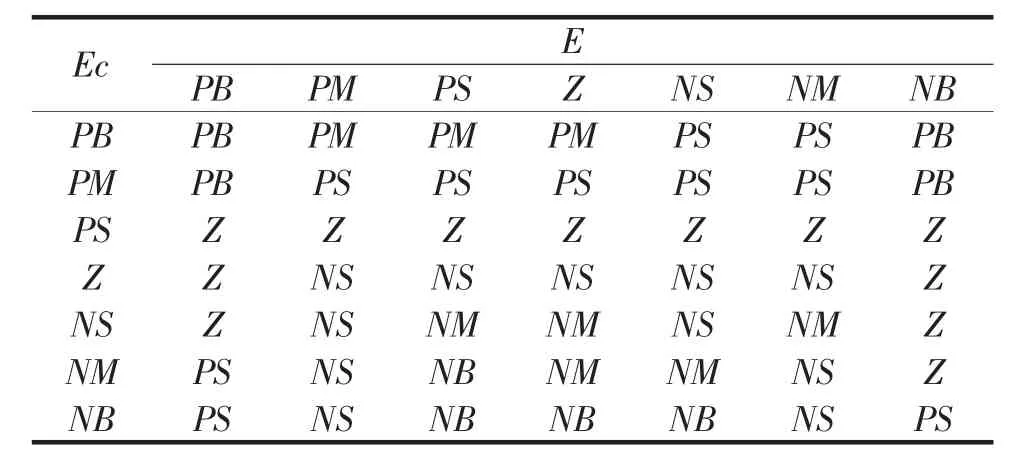
表3 Kd的模糊控制规则表
3.3 基于模糊规则表的Mam dani模糊推理
根据模糊调整规则表1,2,3可以得到,将各参数调节规则写成条件语句的形式如下:
If E is Miand EC is Ni,
Then Kpis Ui,KiKiis Vi,Kdis Wi,
其中,Mi,Ni,Ui,Vi,Wi是相应支集上的模糊集合,i=1,2,…,m。

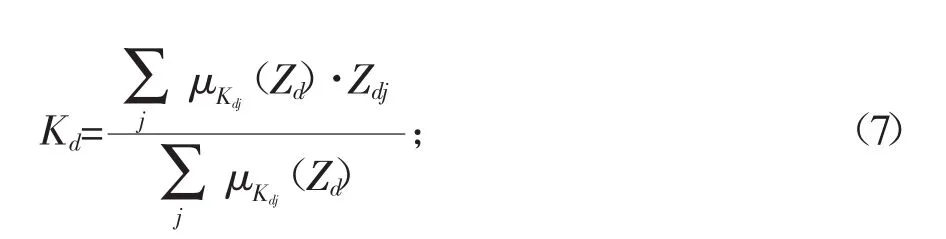
运用Mamdani推理算法和“极大-极小”合成模糊规则,再进行模糊运算。例如e=p,e c=q,通过表1可以得到K p的模糊推理结论为[6]:同样由表2,3和(6)式可分别得到参数Ki,Kd在不同的速度e和速度变化量e c下的所有模糊取值的隶属度,之后由速度e和速度变化率e c的测量值,通过反模糊化加权平均法进行模糊判决,可以得到Kp,Ki,Kd的精确值如下:

3.4 Matlab仿真研究
以下是在Matlab环境中对图2所示的自适应模糊PID控制系统进行编辑,按Matlab仿真的正确步骤选步长,并模拟示波器X/Y轴参数进行仿真。图4给出自适应模糊PID控制系统跟踪矿井提升机的速度的具体过程。
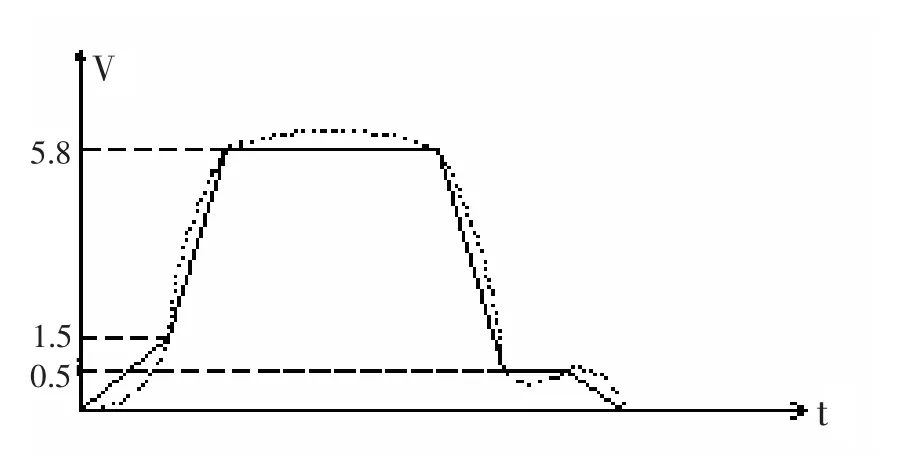
图4 速度跟踪系统的示意图
4 结论
针对复杂的矿井提升机系统,根据PID控制和模糊控制的优点和缺点,提出了一种自适应模糊PID控制方法,并给出其结构图,同时还指出了PID参数模糊自整定的原则;之后设计了模糊控制器;确定了该控制器的模糊语言变量及其隶属度函数;给出PID参数模糊自整定规则表;还应用Mamdani推理算法、运用极大-极小合成规则进行模糊运算;最后通过Matlab仿真表明,这种新型的控制器是一种设计简单、实用性强的智能控制器,同时还具有动态性能好、稳态精度高、可靠性及鲁棒性强的特点,不但适用于复杂的矿井提升机系统,而且可应用于其它的工业提升系统,尤其为整合煤矿的提升系统提供了一种技术方案。
[1]熊均泉,戴果华,佘致廷.基于Matlab的退火炉温度模糊PID控制的仿真研究[J].中国仪器仪表,2005(5):80-82.
[2]范子荣.基于电加热炉温度系统的自适应模糊PID-Smith控制方法研究[J].山西大同大学学报:自然科学版,2008,24(5):62-64.
[3]章卫国,杨向忠.模糊控制理论与应用[M].西安:西北工业大学出版社,2001.
[4]范子荣.模糊PID-Smith智能控制器的设计[J].山西大同大学学报:自然科学版,2009,25(5):66-68.
[5]闻新,周露,李东江.Matlab模糊逻辑工具箱的分析与应用[M].北京:科学出版社,2007.
[6]汤兵勇,路林吉,王文杰.模糊控制理论与应用技术[M].北京:清华大学出版社,2002.
〔责任编辑 石白云〕
A Study of Self-adaptive Fuzzy PID-controller based on the M ine Hoist
SUN Li-jun
(Machine and Electricity Section,Xinzhou Kiln Mine ShanxiDatong CoalMine Group Company,Datong Shanxi,037021)
Based on the velocity track of the frequency-conversion speed-regulation system for themine hoist,a self-adaptive fuzzy PID controller is studied.PID parameter is adjusted on velocity and velocity change.A Matlab simulation study of the system shows that the controller possesses both the precise character of typical PID controller and the fast,flexible,reliable advantage of fuzzy controller,feasible project is given for themine hoist system.
mine hoist;velocity track system;fuzzy control;PID
TD63+3
A
1674-0874(2012)02-0063-04
2012-01-18
孙丽军(1980-),男,山西大同人,助理工程师,研究方向:煤矿机电。
