基于人体关节的七自由度仿人手臂设计与分析*
2012-09-12戚开诚张建军
戚开诚,高 峰,张建军,刘 伟
(1.河北工业大学机械学院,天津 300130;2.上海交通大学机械与动力工程学院,上海 200240)
基于人体关节的七自由度仿人手臂设计与分析*
戚开诚1,高 峰2,张建军1,刘 伟1
(1.河北工业大学机械学院,天津 300130;2.上海交通大学机械与动力工程学院,上海 200240)
根据人体关节特点,提出采用并联机构作为机器人手臂的各个关节。定义两种并联机构模块:正交三自由度球面并联机构3-RRR,用SS来表示;正交两自由度球面并联机构2-RR,用SU来表示。根据人手臂的关节的运动特点,采用模块SS作为手臂的肩关节,用模块SU作为手臂的肘关节和腕关节,串联起来设计了串并联七自由度手臂。定义了模块的输入角度和输出角度,得出了两种角度的数值关系。在此基础上对7自由度手臂进行了位置分析,通过仿真验证了其正确性。为控制系统的研究奠定了基础。
并联机构;模块化;仿人手臂;串并联
0 引言
60年代就有仿人体关节的机械手腕设计,如最早用于大批量生产的美国Unimate公司研制的Unimate机械手,现代很多机械手的设计思想都来自于该机械手,如 Unimate2000B机械手腕[1],它有3个Pitch-Yaw-Roll自由度,该机械手腕用液压系统来驱动,通过直齿和锥齿轮来实现3个运动,结构较复杂,重量也很大。基于Unimate机械手设计思想的PUMA562机器人,也具有3个转动运动,其运动也是通过锥齿轮来实现的,该机器人的有些结构如驱动装置的安放,其思想就来自人关节动力来源肌肉的安排方式。经过了15年的研究历程,1992年Graco置。但这些机械手腕的共同特点是传动系统多采用齿轮传动,系统复杂,精度低。文献[2]中提出采用并联机构3-RRR,设计其不同的参数,作为肩关节和腕关节,根据人体关节特点,设计了7自由度拟人手臂。Jadran等人[3]利用并联结构作为手臂的肩关节,能够实现三个转动和一个移动。
本文基于人体关节的特点提出并联机构模块作为手臂关节:正交三自由度球面并联机构3-RRR[4],用SS来表示;正交两自由度球面并联机构2-RR[5],用SU来表示;采用模块SS作为手臂的肩关节,用模块SU作为手臂的肘关节和腕关节,利用平行四杆机构来设计驱动电机的安装位置组成串并联七自由度手臂。克服了串联机构关节的缺点:由于驱动器的安置造成的惯性大;串联关节占有空间大,刚性小等。
1 人体手臂关节及模块设计
1.1 手臂关节的特点
肩关节是球窝关节,如图1,球窝关节很形象(Ball-and-Sochet Joint),这种关节有三个运动,即伸屈、外展内收、旋转或环转运动(Pitch-Yaw-Roll)。肘关节,图2,肘关节能做屈伸运动,还可以实现前臂的旋转运动,也就是Pitch和Yaw两个转动自由度。如图3,腕关节由桡骨,尺骨和关节盘等组成,可以屈伸、外展内收、旋转(前臂的旋转),即实现的是Pitch和Roll两个转动自由度。

图1 肩关节结构
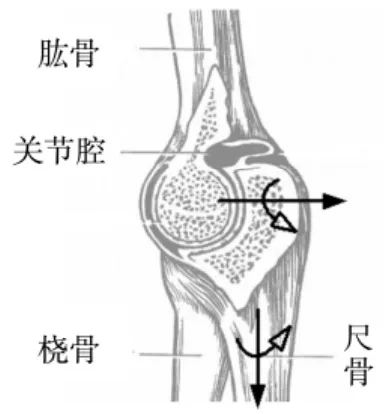
图2 肘关节结构

图3 腕关节结构
人体的关节运动不是简单的串联组成,而是多自由的并联关节,驱动就是附着在躯体或手臂上的肌肉群。肩关节为3自由度并联关节,腕关节和肘关节为两自由度[6]。
1.2 模块设计
通过上面对人体关节特点的分析,我们提出用两种并联机构作为模块来设计仿人手臂的关节:正交三自由度球面并联机构3-RRR,用SS来表示;正交两自由度球面并联机构2-RR,用SU来表示。根据人手臂的关节的运动特点,采用模块SS作为手臂的肩关节,用模块SU作为手臂的肘关节和腕关节。
SS模块为正交三自由度球面并联机构,动、静平台由三条相同的三个转动副构成的支链连接所有的9个转动副均通过球面机构的球心。与动、静平台相连的6个转动副分别位于两个正三角锥上,且每条支链的相邻的两个转动副的轴线垂直。其CAD模型如图4。
SU为正交2-DOFs 2-R球面机构,该机构是一个封闭的空间5杆机构,5个杆件由5个R副连接而成,而且5个R副轴线相交一点,而且5个杆两端的转动副轴线成90度。两个主动转动副即旋转电机放置于同一平面且固定,电机轴互相垂直,相交于球心O,动平台只能做围绕球心O的旋转运动。两个驱动电机根据使用的位置,可以利用平行四杆机构安放在上臂或前臂上。图5为其CAD模型。

图4 模块SS的CAD模型

图5 模块SUCAD模型
2 仿人手臂的设计
肩关节采用三自由度模块SS,肘关节和腕关节采用两自由度模块SU,根据人的各个关节的运动特点肘关节和腕关节的安置方向也不同。如图4为肩关节CAD模型;肘关节和腕关节的CAD模型,如图6,7,其中驱动是通过平行四杆机构来实现的;肩关节中B和上臂固定在一起,肘关节中的A和前臂固连在一起,则组成七自由度拟人手臂。如图8所示为手臂的CAD模型及样机。

图6 肘关节CAD模型

图7 腕关节CAD模型

图8 拟人手臂CAD模型及样机
3 关节模块输入和输出的关系
对于两种模块的运动分析已经非常成熟[4-5,7],这里我们仅仅做一个回顾。
3.1 模块SU
取SU每个转动副的轴线上的单位向量s1,s2,s3,s4,s5。建立固定坐标系,x和y分别取在电机轴上,也就是和s1,s2重合;建立动坐标系xm和ym分别取s5和s3的反向,初始位置与固定坐标系重合。定义SU的输入角度为电机的驱动θ1和θ2,输出角度为绕s5和s3的角度θx和θy。如图5为初始位置。
给定动平台的方向余弦矩阵,求解关节角度,就是并联模块的反解。同理也可以得到位置反解:

式(1)就是输入角度和输出角度的关系,那么对于该模块我们可以用输入角度和输出角度来表示为SU(θ1,θ2,θx,θy),可以根据模块所用位置不同更换角度的名称。
3.2 模块SS
SS,正交三自由度球面并联机构,其各个杆件间的相对关系如图4所示。各转动副轴线所在位置分别用单位向量表示 ui,vi,wi,i=1,2,3,其中 i的值代表不同的支链。所有的转动轴线均由球心出发指向转动副方向。静坐标系O-XYZ固连于球面机构静平台上,其中 OX、OY、OZ 轴分别与单位向量 u1、u2、u3重合,原点O与球心重合。动坐标系o-xyz的原点o亦处于球心处,其中 ox、oy、oz轴分别与 w3、w1、w2重合。那么由动平台方向余弦矩阵的定义可以得出R= [w3w1w2]。定义SS的输入角度就是电机的驱动角度,把动平台的ZYX欧拉角,分别为α,β,γ,定义为模块的输出角度。初始位置如图4所示。通过分析可以得到:

则式(2)即为输入角度和输出角度的关系式。那么该模块可以用输入输出角度表示为 SS(θ1,θ2,θ3,α,β,γ)。
4 仿人机器人手臂的位置分析
4.1 位置反解
以肩关节模块的旋转中心建立世界坐标系,初始位置如图9。
给定末端的姿态和位置,求解各个关节的输入角度。不考虑各个关节的输入角度,我们首先求关节的输出角度,此时可以把手臂简化为一个冗余7自由度串联手臂。定义各个关节的输入和输出角度,见表1。

表1 关节的输入和输出角度

图9 坐标系建立
七自由度手臂有一个冗余角度,如果不考虑关节角度的限制的话,当腕关节的位置给定,肘关节的位置可以在一个圆上变化,这个圆称为冗余圆,这个圆是这样定义的,以肩关节为圆心,以上臂为半径做一个球S1,以腕关节的中心为圆心,以前臂为半径作一个球S2,那么S1和S2的交线为一个圆,这个圆就是我们定义的冗余圆。
如图9。如图α为冗余角度。以肩关节为中心建立固定坐标系,如图。给定的参数为末端的位置姿态(p,R),还有冗余角度 α,‖rU‖ =l1,‖rF‖ =l2,‖rH‖ =l3。
(1)首先求解θ4out

由余弦定理得:

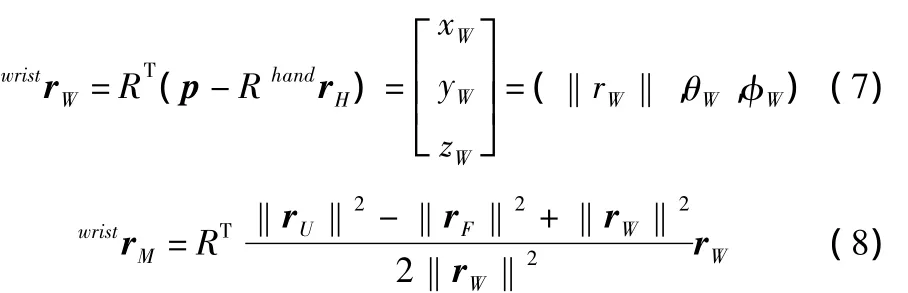
(2)求解 θ6out,θ7out由图 9 通过矢量可以得出

那么在腕关节的坐标系中:
在三角形BCM中:

可以解得:

(3)求解 θ5out
在腕关节的坐标系中:


(4)求 θ1out,θ2out,θ3out
组成手臂各个连杆姿态间的关系为:



为了表达的方便,设:

4.2 实例


根据各个关节的输入输出关系可以得到输入角度:

需要说明的是,如何给定冗余角度在实际中是个比较困难的问题,要根据实际的避障或者奇异位置来给定。这里冗余角度的给定是通过正解里面给定的,也就是说通过正解里面的前三个角度,求得前臂的位置,通过球坐标给定这个角度。
4.3 仿真验证
在Solidworks中建立手臂的CAD模型,导入仿真软件Adams中,用其测量功能,来验证反解的正确性。在肩关节的中心处建立marker点,作为一个参考点,也就是相当于模型的固定坐标系,marker点的方向和我们数值求解过程中的固定坐标系方向一致;在手臂的末端,中心处建立marker,为要测量的点,即末端的动坐标系,方向和数值求解一致,通过measure-orientation可以测量末端的姿态矩阵和位置。我们给定一组输入角度,也就是实例中得到的输入角度,可以得到末端的位置和方向余弦矩阵。如图10~12为仿真的模型和相应的曲线,在图11中,t=1时,各个曲线上对应的纵坐标的值就是对应方向余弦矩阵元素的值。在图12中,当t=1时,x,y,z的取值为手臂末端的位置值。

图10 仿真模型

图11 手臂末端方向余弦

图12 手臂末端位置曲线
5 结束语
(1)分析了人手臂的关节运动功能及结构特点——肩关节,肘关节以及腕关节均为并联关节。
(2)采用两种并联机构模块来设计手臂各个关节:正交三自由度球面并联机构3-RRR,用SS来表示;正交两自由度球面并联机构2-RR,用SU来表示。SS作肩关节,SU作肘关节和腕关节,根据关节的运动特点布置模块的位置,组成模块化的串并联7自由度拟人手臂,设计了样机。
(3)对模块进行了位置分析,定义了模块的输入角度和输出角度,并且得出了输入角度和输出角度的关系。为下一步的手臂的整体运动分析和控制系统的研究提供了理论基础。
(4)把并联模块看成单独关节,按照串联手臂求解位置反解,得到的位置反解为关节模块的输出,在通过并联关节输入输出关系,得出手臂的输入;进行了数值分析,进行了仿真验证,为控制系统的研制提供理论基础。
[1]S D Donald,G R Dunlop.Retrofitting path control to a Unimate 2000B robot[C].Proc.2001 Australian Conference on Robotics and Automation Sydney,14-15 November 2001:152-156.
[2]刘辛军,王劲松,高峰.一种串并联结构拟人七自由度冗余手臂的设计[J].中国机械工程,2002(2):101-104.
[3]Hun-ok Lim,Yusuke Sugahara,Atstua Takanishi,Development of a biped locomotor applicable to medical and welfare fields,Proceedings of the 2003 IEEVASME International Conference on Advanced Intelligent Mechatronics(AIM 2003):950-955.
[4]Gosselin C,St-Pieere E,Gagne M.On the development of the agile eye[J].IEEE Robot Autom Mag,1996,3(4):29-37.
[5]Cervantes-Sanchez J,Hernandez-Rodriguez J,Gonzalez-Galvan E.On the 5R spherical,symmetric manipulator:workspace and singularity characterization[J].Mech Mach Theory.2004,39(4):409-429.
[6]陈子琏.人体结构[M].北京:科技出版社,2001.
[7]杨加伦,高峰,戚开诚,等.正交三自由度球面并联机构的位置正反解新解法[J].机械设计与研究,2008,24(3):30-33.
Design of a 7-Dof Anthropomorphic Arm Inspired from the Structure of Human Joints
QI Kai-cheng1,GAO Feng2,ZHANG Jian-jun1,LIU Wei1
(1.School of Mechanical Eng.,Hebei Univ of Technology,Tianjin 300130,China;2.School of Mechanical Eng.,Shanghai Jiaotong Univ.,Shanghai 200240,China)
According to the characteristics of the human joint,the parallel mechanisms are used to be the human arm joints.Two parallel mechanism modules are defined:orthogonal 3-RRR spherical mechanism(SS),orthogonal 2-RR spherical parallel mechanism(SU).According to the kinematics of the human joints,the shoulder joint features 3 DOFs with SS,and the elbow and wrist joints have 2 DOFs and be structured with SU.A serial-parallel anthropomorphic arm comes into being by linking these modules serially.The two angles of the modules are defined:input angle and output angle as well as the expression of which is obtained.In the last,the inverse position of the humanoid arm is analyzed,and a simulation is established to testify its correctness.The research in this paper is the basis of the control system of the arm in the future.
parallel mechanism;modular;anthropomorphic arm;serial-parallel
TH112;TP13
A
1001-2265(2012)12-0001-04
2012-04-12
国家863计划主题项目(SQ2011AA0403839001);国家自然科学基金(51175144)
戚开诚(1975—),男,河北滦南县人,河北工业大学讲师,硕士,主要从事:仿人形机器人,并联机构研究等,(E-mail)qkcheng@gmail.com。
(编辑 赵蓉)