基于热工控制优化的电泵电流波动问题解决方法
2012-09-12张华磊罗志浩
张华磊,罗志浩
(浙江省电力公司电力科学研究院,杭州 310014)
某发电厂2号机组容量为130 MW,2台锅炉给水泵均为电动泵,1台运行1台备用。在运行过程中发现,在汽包水位控制投入自动的情况下,2台给水泵均出现在某些工况下勺管调节性能变差,给水泵电流、给水流量、汽包水位波动大的现象,对机组安全稳定运行构成威胁。曾利用2号机组检修机会,对给水泵的勺管凸轮装置进行了机械改造,机组启动后又分别对2台给水泵进行了调节性能试验和负荷变动试验。试验结果表明:虽然2台给水泵电流抖动现象明显好转,但2号给水泵在机组负荷约80 MW、勺管开度为65%~70%时,给水泵电流仍有晃动,最大幅度为30 A,影响了2号给水泵的全负荷段正常运行。为解决这一问题,提出了基于热工控制优化的解决方案,实施后的实际运行表明,效果明显、措施有效。
1 问题分析
在2号机组的DCS控制系统中,2台给水泵主要用于三冲量汽包水位控制。正常运行时,给水泵为1台运行、另1台备用。通过调节运行给水泵的转速来控制锅炉给水量。当机组在启动或低负荷时,控制系统只根据汽包水位信号进行调节,即单冲量控制;机组在高负荷时,控制系统采用主蒸汽流量、汽包水位加给水流量的三冲量控制。主蒸汽流量为三冲量控制回路主调节器的前馈信号,给水流量为三冲量控制回路副调节器的测量值,控制原理见图1。

图1 优化前汽包水位控制原理
机械改造前,通过执行机构的操纵臂带动勺管凸轮,再由勺管凸轮带动齿条、齿轮机构来控制勺管位置。改造后,改成由操纵臂直接带动齿条、齿轮机构来控制勺管位置。改造前后,给水泵勺管的传动部分有了明显的改变,也引起了给水泵勺管调节特性的改变,因此机组启动后对2台给水泵都进行了调节性能试验。
1.1 调节性能试验
机组启动后,由2号给水泵带负荷运行,进行调节特性试验。机组负荷从80 MW升至125 MW,有关特性试验数据见表1,2号给水泵的调节特性曲线见图2。

表12号给水泵调节特性试验数据
从调节特性试验数据和特性曲线可以看出:2号给水泵经过机械改造后,调节过程总体线性度较好,但勺管开度在65%~70%时曲线较陡,流量变化过快。勺管开度变化5%,泵出口流量变化约60t/h。由给水泵勺管的机械原理可知:给水泵出口流量的大小取决于给水泵的转速,而转速取决于勺管的回油量。如果单行程内回油量变化过大、过快,将严重影响给水泵出口流量的稳定,相应的就会引起给水泵电流抖动。如果能利用热工控制优化手段,使给水泵调节特性变得更加平缓,就可以起到平稳给水泵电流和流量的作用。
1.2 系统共振
引起电流抖动的原因有:电流信号受到干扰、电机故障以及系统共振。经过现场排查,前2个原因基本可以排除,主要原因可能是改造后给水泵勺管传动部分在某种工况下与某些因素产生了共振,从而引起电流抖动。从汽包水位控制角度来说,2号给水泵改造后电流仍出现抖动是在机组负荷80 MW、勺管开度约70%时,此时汽包水位控制系统已处于三冲量水位控制,影响给水泵调节指令的因素有汽包水位、主蒸汽流量和给水流量。这3个信号在机组正常运行过程中会有一定的波动,在PID控制器的作用下,使勺管指令进入机械传动共振点。因此必须寻找避开共振点的方法,使汽包水位、主蒸汽流量和给水流量对勺管指令的影响更加平缓。
2 控制优化方案
2.1 调节特性控制优化
调节特性控制优化的具体方法是在汽包水位三冲量副调节器出口增加一个函数模块,目的是使三冲量副调节器送出的给水泵勺管开度指令更加线性化,在勺管开度65%~70%区间内的调节特性曲线更加平缓。控制优化原理见图3。
其中调节特性优化函数f1(x)的具体参数可以由2号给水泵调节特性试验数据反推算得出。由于1号给水泵和2号给水泵在机组运行时为一用一备关系,2台给水泵在汽包三冲量控制回路中采用同一套PID调节器参数,所以2号给水泵调节特性要尽可能与1号给水泵调节特性一致,数据反推算时也要参考1号给水泵的调节特性。进行数据反推算后,得出2号给水泵调节特性优化函数的具体参数(见表2)。
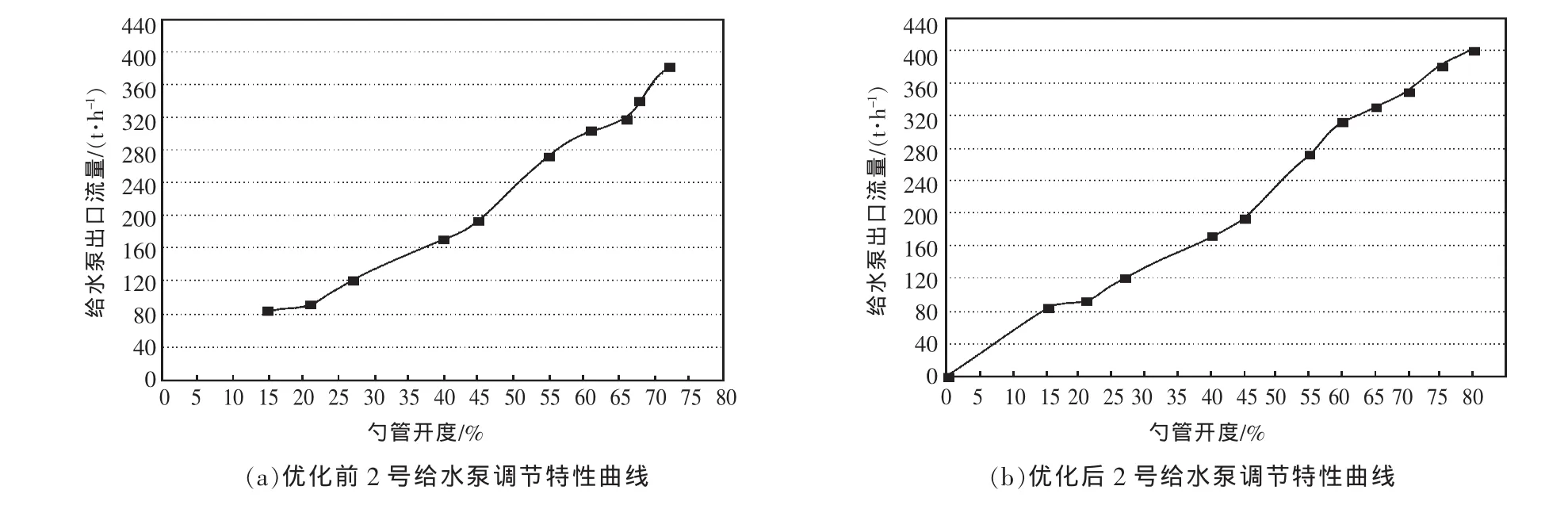
图2 优化前后2号给水泵调节特性对比曲线
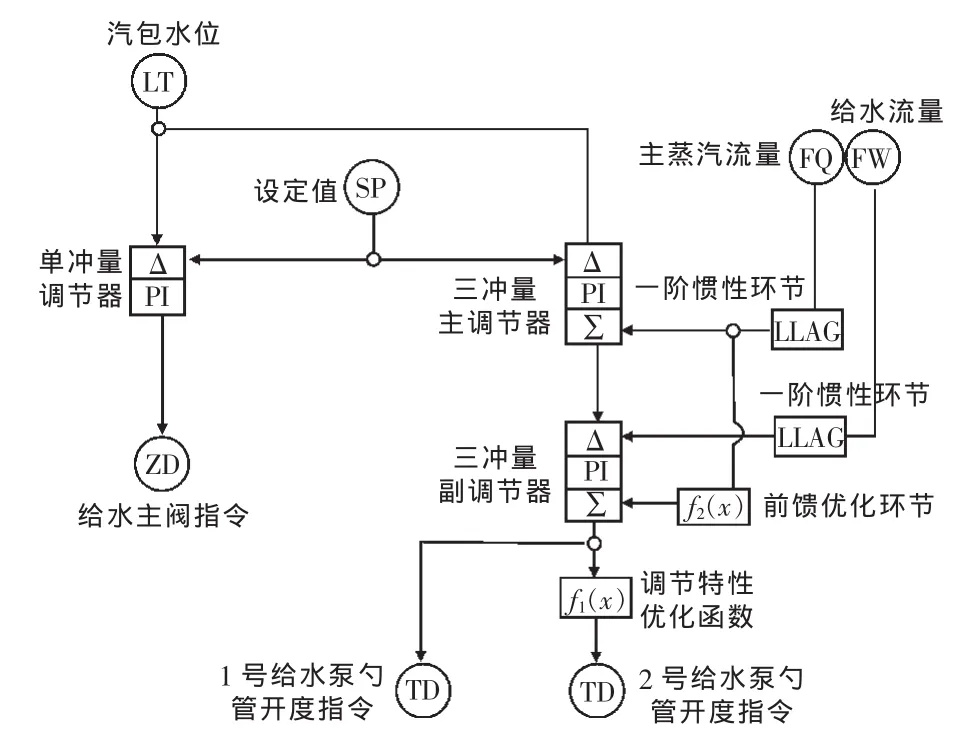
图3 优化后汽包水位控制原理
调节特性优化后的特性曲线见图2。
可以看出,在调节特性优化函数的作用下,2号给水泵调节特性曲线变得更加平缓,线性度更好,特别是勺管开度在65%~70%区间时,泵出口流量变化较平缓,有利于稳定给水泵电流。
2.2 三冲量信号优化处理
三冲量信号控制优化的目的是使汽包水位、主蒸汽流量和给水流量信号对勺管指令的影响更加平缓。由于汽包水位在进入控制系统前已经作了滤波防抖动处理,故只需要对主蒸汽流量和给水流量进行处理。如图3所示,分别在主蒸汽流量和给水流量进入控制回路前增加一阶惯性环节LLAG,可起到使信号平缓、防止波动的作用。
主蒸汽流量作为三冲量调节器的前馈环节,对三冲量副调节器的影响比较大。对主蒸汽流量信号采用一阶惯性环节处理后,减弱了主蒸汽流量自身波动或突变对副调节器的影响。给水流量在三冲量副调节器中是被调量,流量信号的波动将直接影响调节器的输出,即给水泵勺管开度指令。对给水流量信号采用一阶惯性环节处理,减弱了给水流量信号波动对给水泵勺管开度指令的影响。通过试验,最终确定2个一阶惯性环节的惯性时间参数为3 s。
三冲量副调节器增加前馈优化环节f2(x),前馈优化环节输入信号为经过一阶惯性处理后的主蒸汽流量,反映机组实际负荷。f2(x)为不同负荷下对应的给水泵勺管开度指令函数。三冲量副调节器增加前馈优化环节后,能够更快更准确地响应机组负荷的变化。
3 实施效果
利用2号机组调停检修机会,在相应DCS控制回路中实施了上述控制优化方案。经过优化后,2号给水泵调节特性变得更加线性和平缓,三冲量信号也减弱了自身抖动对给水泵勺管开度指令的影响。经过一段时间的运行实践,2号给水泵投入运行时在机组大幅度升降负荷以及日常运行过程中均未发现给水泵电流、给水流量、汽包水位大幅波动的现象。图4为相同的负荷变动工况下,2号给水泵在优化方案实施前后的调节效果对比。
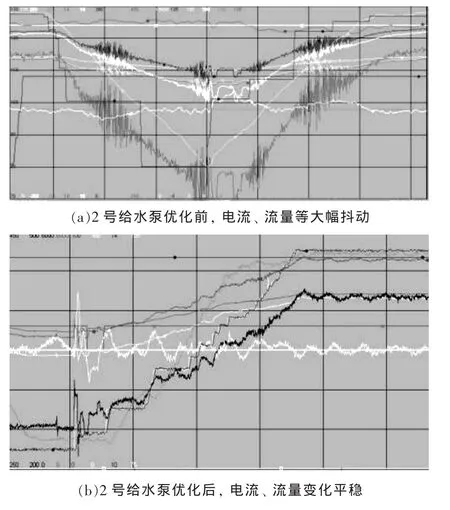
图42号给水泵优化方案实施前后调节效果对比

表22号给水泵调节特性优化函数参数
4 结语
针对130 MW机组电泵电流抖动问题,提出基于热工控制优化的解决方法,能够有效解决机械原因引起的问题。本文提出的基于热工控制优化的解决方法实施简单,无需投入过多的人力物力,提高了机组的可靠性,对解决类似问题有一定参考意义。
[1]DL/T 657-2006火力发电厂模拟量控制系统验收测试规程[S].北京:中国电力出版社,2006.
[2]朱北恒.火电厂热工自动化系统试验[M].北京:中国电力出版社,2006.
[3]成福龙.调速给水泵液力耦合器凸轮的功效和特性[J].华东电力,1998(9)∶28-31.