GPS测速方法与精度分析*
2012-08-29孙中豪姚飞娟
杜 娟,孙中豪,姚飞娟,刘 星
(63883部队,河南 洛阳471000)
0 引 言
目前高、中精度无线电外测设备的GPS精度鉴定,是通过飞行试验对测控设备的精度及数据的不准确性作出评定,检验测控设备是否达到预期的设计指标并给出置信度,确定测控设备的随机误差和系统误差,为改善、提高测量系统精度提供依据。精度鉴定试验使用的是GPS全球定位系统原理,GPS不仅可以确定运动载体的实时位置,还可以确定载体的瞬时速度。
GPS主要提供三种类型的原始观测值,即伪距、载波相位和多普勒频移,根据不同的定位精度需求,派生出单点定位、伪距差分定位、相位差分定位等多种定位模式。综合而言,利用GPS进行测速的方法大致有以下三种:1)利用GPS的定位结果,通过位置差分来获取速度;2)利用GPS原始多普勒观测值直接计算速度;3)利用载波相位差分所获得的多普勒观测值来计算速度[1]。目前,GPS精度鉴定试验中采用的是载波相位实时差分获得多普勒观测值来计算速度,测速精度为0.03m/s,但是作为高精度测速设备精度鉴定比对标准较低。通过采用白噪声正交多项式最优线性滤波器方法,设计开发了根据位置精度微分求解位置中心平滑软件,在外测数据处理中,测速实际测量获取的都是某时间区间内的多普勒频率周数,相当于相位变化增量,也就是距离的增量,数据的中心平滑是事后处理中最常用的方法,位置中心平滑后的GPS测速精度达到了0.01m/s,极大地提高了载波相位差分测速精度。
1 GPS测速原理
1.1 GPS位置差测速
根据历元t-S|t和t+S|t的位置向量r1和r3,求得历元t的载体速度

式中,S|t为GPS采样间隔。
式(1)中确定的速度为载体在时间2S|t的平均速度,如果采样间隔S|t趋近于0,则该平均速度即为瞬时速度。
1.2 白噪声正交多项式滤波原理
平滑(主要是中心平滑)用于事后数据处理,为了减小观测随机误差和获取测速数据。将输入测量数据x(t)分解成两部分,即真实信号(含系统误差)和随机噪声两部分。其中真实信号由k阶正交多项式描述,随机噪声为平稳的、均值为零的白噪声(等方差、不相关的)。利用等间隔采样的测量数据序列{xi}和最小二乘估计,即可估计k阶正交多项式的系数,从而获取测量数据真实信号的估值,就是时间函数的正交多项式的估值。由此,可以计算平滑(内插)、滤波(端点平滑)和预测(外推)某个时刻ti(i≥N)的真实信号的估值。
应用条件:假设测量数据{xi}是等间隔采样的离散序列,其随机噪声在时间序列上为零均值、不相关的白噪声[2]。
计算步骤
1)输入数据的正交多项式模型
假设等间隔的离散测量数据序列{xi}可以表示为
2)由最小二乘估计对多项式系数估计
根据最小二乘估计原理,求解多项式系数{aj}

其中:
3)正交多项式滤波器表达式

令

为正交多项式滤波的权系数。
在t=N+α时刻L阶微商的正交多项式最优滤波的估值为

α为整数。α<0时,称为平滑;α=0时,称为滤波;α>0时称为预测或外推。
当h≠1s时(h为采样间隔),即ti=ih,得到L阶微商最优线性估值为

权系数为

4)滤波方差比

利用方差比关系式可以分析2种白噪声多项式滤波的优劣和效果。
5)位置与速度的滤波和预测公式
速度二阶中心平滑公式为

式中,N=2n+1,n为半点数。
方差比为

2 测速精度检测与分析
位置中心平滑软件采用MATLAB语言设计,将解算的直角坐标系X、Y、Z下位置数据利用等间隔采样的测量数据序列和最小二乘估计,估计二阶正交多项式系数,再计算平滑某个时刻的真实信号的估值,利用速度二阶21点中心平滑公式得出测速数据,计算出的滤波方差比真实地反映出了随机噪声优劣,数据越小越好。流程如图1所示。
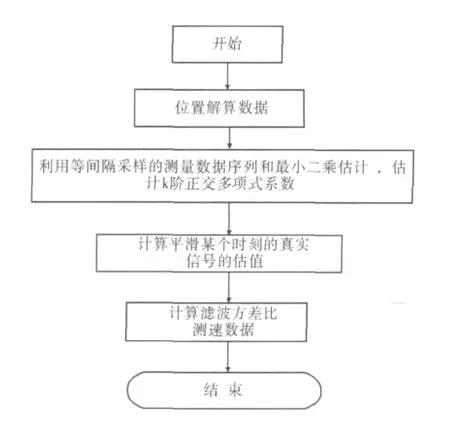
图1 位置中心平滑软件设计流程图
测速检测采用GPS信号模拟器进行检测,通过模拟器预设动态测速,再通过模拟器生成射频输出信号至被检测的GPS接收机,GPS接收机进行事后载波相位差分得出位置解算,通过速度解算软件的位置中心平滑得出测速结果和模拟器预设测速比对,以检测机载测量分系统的测速精度。如图2所示。

图2 测速精度原理图
模拟器数据进行精度分析,数据体结构为
Gpstime;Absolute ECEF-X;Absolute ECEFY;Absolute ECEF-Z;ECEF X Velocity;ECEF Y Velocity;ECEF Z Velocity;
其中 Absolute ECEF-X;Absolute ECEF-Y;Absolute ECEF-Z为相关度较高的位置数据,由Waypoint处理得来,ECEF X Velocity;ECEF Y Velocity;ECEF Z Velocity为速度真值数据,利用相关度较高的位置数据,进行速度二阶中心平滑,将得到的速度数据与速度真值数据比较,如图3~5所示。

图3 中心平滑后X方向与真值差
由图5可以看出中心平滑后X、Y、Z方向与测速真值比值大部分在0.01m/s之间,与差分GPS模式输出测速值0.03m/s比较高出了三倍,通过测试检验,可看出利用中心平滑后的测速数据更为精确。

3 结 论
数字滤波与平滑处理方法不仅可以减小或部分滤除观测数据的随机误差,也能够通过数字滤波器进行二阶微分求速得到高精度的测速元素,经过数据比对分析通过位置中心平滑软件处理后的测速精度比接收机实时差分测速精度高出了三倍,可以为高精度的测速测控设备提供更高精度的鉴定比对标尺。
[1]杨 龙,刘焱雄.GPS测速精度分析与应用[J].海洋测绘,2007(2):23-26.
[2]刘利生.外测数据事后处理[M].北京:国防工业出版社,2000.