基于DSP的直线直流电机初始位置检测设计*
2012-08-28杜志强朱德荣
杜志强, 朱德荣, 艾 武
(1.洛阳理工学院机电系,河南洛阳 471023;2.华中科技大学国家数控系统工程技术研究中心,湖北武汉 430074)
0 引言
在现有的振镜式激光扫描系统中,Z轴动态聚焦模块的往复直线运动是通过旋转电机加上一套转换装置来实现的,不仅结构复杂、存在换向间隙误差和弹性变形,而且难以实现较高的控制精度和较高的往返运动频率[1-2]。用高性能的直线直流电机直接驱动伺服单元实现Z轴的动态聚焦是一种新的传动进给方式[3],其结构简单、体积小,并具有较好的动态响应性能。它消除了传统机械传动链(由旋转到直线)所带来的一系列不良影响,极大地提高了进给系统的快速反应能力和运动精度,在快速往返运动时可实现较高的位置跟踪控制精度[4-6]。
在高精度的直线电机位置伺服控制中,位置检测是其关键技术之一。初始位置(即零点)是直线电机驱动系统实现精密位置控制的起点。零点的定位误差将影响直线电机的位置控制精度。因此,在直线电机直接驱动系统中,要求准确而快速的找到零点,且零点的定位误差还要尽可能小。
以微控制器DSP为核心构成的电机伺服控制系统代表着当今电机数字控制的主流方向,DSP控制器将一个高性能的DSP核、大容量的片上存储器和专用的运动控制外设电路(事件管理器模块、通用定时器、捕获单元、正交编码脉冲接口电路等)以及其他功能的外设电路集成在单芯片上,为各类电机的位置伺服控制提供了方便的接 口 功 能[7-8]。本 文 提 出 了 基 于 DSP TMS320F2812的直线直流电机驱动系统初始位置检测设计与实现方法。
1 直线电机驱动系统
直线电机驱动系统是建立在一个基于DSP开发系统的试验平台上进行的。在试验过程中,所需软件程序的编写、在线调试、试验数据的获取,在DSP集成开发环境CCS下完成。PC机通过主板上的EPP接口与仿真器连接,仿真器再通过JTAG接口与DSP控制板相连。直线电机伺服控制系统试验平台框图如图1所示,DSP采用TI公司的 TMS320F2812,直流驱动器采用 KOLLMORGEN公司的 KXA-48-816,光栅尺采用NUMERIK JENA公司的LIE5 2PL5GDO,分辨率为1 μm。控制系统采用数、模混合双闭环控制方式。即位置环为数字控制,由DSP TMS320F2812完成,用于实现较高的定位控制精度,而电流环及PWM由模拟电路完成,以满足电流环实时控制的需要,同时使闭环控制系统具有较快的动态响应能力。光栅尺的尺带固定不动,读头固定在直线电机的动子上,随动子直线运动,直线位移检测是通过光栅尺的读头与尺带相对运动实现的。
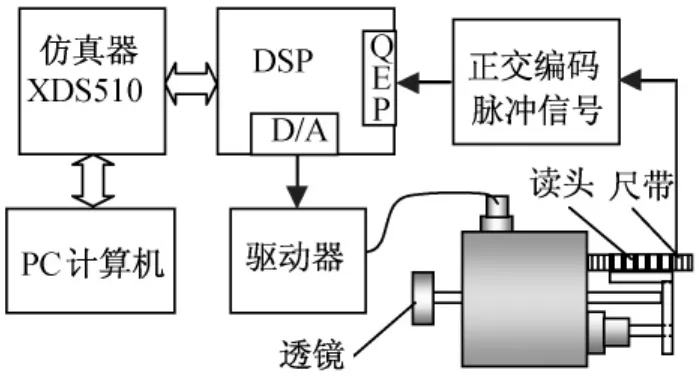
图1 直线电机伺服控制系统框图
2 初始位置检测设计与实现
直线电机的初始位置(零点)是直线电机在有效行程内实现精密位置伺服控制的初始点。直线驱动系统在每次断电后,其动子的平衡位置不在一个固定的点上,而是位于零点附近(小于±1 mm)。因此,要实现直线驱动系统的精密位置伺服控制,必须确定零点的初始位置,即通电后首先要进行回零操作。
2.1 硬件电路设计

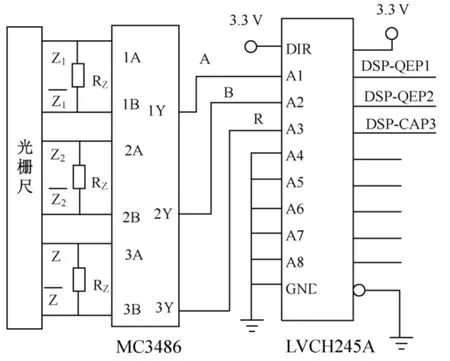
图2 直线位移信号检测电路原理图
设计的直线位移信号检测电路板实物照片如图3所示。实测的正交编码脉冲及参考点脉冲信号如图4所示。在图4中,信号1与信号2为正交编码脉冲信号,信号3为参考点脉冲信号。
2.2 软件设计
直线驱动系统的初始位置(参考点脉冲)信号R可通过捕获单元引脚CAP3捕获到。在捕获单元使能后,输入引脚CAP3上的指定跳变设定为上升沿触发,指定跳变将所选通用定时器的计数值装入到相应的FIFO栈的同时,相应的中断标志位被置位,可通过查询中断标志位来判断是否找到零点。
为了快速找到零点,首先应确定零点位于动子在自由状态时平衡点的哪一侧,然后再反向慢速回零。实现方法是控制直线电机动子从平衡位置沿正方向移动(轴的外伸方向)1 mm,然后通过软件查询事件管理器A中的中断标志寄存器C的CAP3INT标志位是否为1,如为1,说明中断标志位被置位,捕获输入引脚CAP3发生过信号跳变,即发生过中断事件(此时中断被屏蔽,不产生中断请求,仅置位中断标志位),从而可确定零点在移动的这一侧,否则零点在平衡点的另一侧(反向移动重新查询中断标志位)。清除CAP3INT的标志位后,控制直线电机反向微量进给,同时查询CAP3INT标志位是否被重新置位为1,如为1,说明已检测到零点。初始位置检测的软件设计流程图如图5所示。
图3 直线位移信号检测电路板
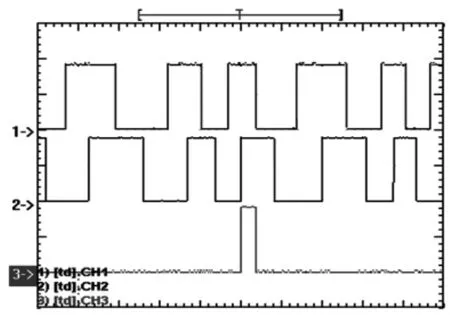
图4 正交编码脉冲及参考点脉冲信号
2.3 直线位移检测时相关的寄存器设置
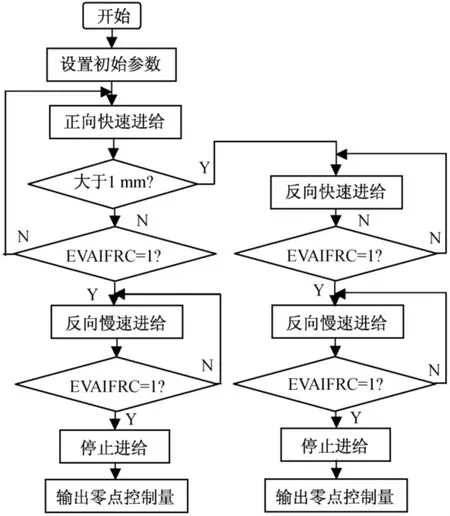
图5 初始位置检测程序流程图
直线电机位置检测是由DSP的事件管理器A完成的。因此,必须对事件管理器A的功能寄存器进行设置。QEP电路寄存器的设置包括:定时器2的周期寄存器(T2PR);定时器2的计数寄存器(T2CNT);定时器2的控制寄存器(T2CON);捕获 FIFO状态寄存器 A(CAPFIFOA);捕获控制寄存器A(CAPCONA);中断屏蔽寄存器 B(EVAIMRB)和 C(EVAIMRC);中断标志寄存器B(EVAIFRB)和C(EVAIFRC)。
3 初始位置检测试验
直线电机驱动系统上电后,首先进行回零操作,即找零点初始位置。为了验证设计的零点初始位置检测方法的可行性,进行了10次回零操作试验。软件设计时,D/A转换的初始值设为32 768(双极性输出对应0 V电压),正方向(D/A值增加)标志为1,快速进给增量为100,反向慢速进给增量为2,判断事件管理器中断标志寄存器C的CAP3INT标志位。找到零点时,读取当前D/A转换寄存器的数字量(该值即为闭环控制时零点的位置控制量输出初始值),位置寄存器的位移值。零点的定位误差即为过零点中断标志位置时,位置计数寄存器的值与找到零点后位置计数寄存器的值的差值。表1给出了10次回零点时的试验测量结果(每次找零点之前,动子处于自由状态)。由试验结果可知,找零点的定位误差可控制在±2μm之内。表1中的位移值为找到零点后位置计数寄存器的计数值,D/A值为找到零点后输出的数模转换的数字量。

表1 初始位置检测试验结果
4 结语
直线直流电机驱动系统的零点初始位置检测是实现直线电机双向精密位置伺服控制的关键技术,本文以微处理器DSP TMS320F2812为数字控制器,应用其事件管理器实现光栅尺输出的正交编码脉冲信号和参考点脉冲信号采集与处理,提供了一种实用的光栅尺直线位移初始位置检测实现方法。试验结果表明,该直线驱动系统能实现快速准确的初始位置检测,有较小的零点定位误差,具有广泛的工程实用价值。
[1]XIE J,HUNAG S,DUAN Z C,et al.Correction of the image distortion for laser galvanometric scanning system[J].Elsevier Journal of Optics& Laser Technology,2005,37(4):305-311.
[2]谢军,段正澄,史玉升.用于SLS快速成形制造中振镜式激光扫描系统关键技术[J].制造业自动化,2004,26(4):9-12.
[3]DU Z Q,ZHOU Z D,AI W,et al.A linear drive system for the dynamic focus module of SLS machines[J].The International Journal of Advanced Manufacturing Technology,2007,32(11-12):1211-1217.
[4]江思敏,王先逵,石忠东,等.中凸变椭圆活塞加工用高性能直线伺服系统的研究[J].机械工程学报,2001,37(9):58-61.
[5]YAJIMA H,WAKIWAKA,H,MINEGISHI K,et al.Design of linear DC motor for high-speed positioning[J].Elsevier Journal of Sensors and Actuators A:Physical,2000,81(2):281-284.
[6]冯晓梅,张大卫,赵兴玉,等.基于音圈电机的新型高速精密定位系统设计方法[J].中国机械工程,2005,16(16):1414-1419.
[7]曾祥华.基于TMS320F2812的永磁同步电动机伺服系统设计[J].电机与控制应用,2010,37(2):5-7.
[8]王晓明.电动机的 DSP控制-TI公司 DSP应用[M].2版.北京:北京航空航天大学出版社,2009.