机载捷联惯导的数字仿真与性能评价
2012-08-27胡剑波
胡剑波
(空军工程大学航空航天工程学院,西安 710038)
0 引言
机载捷联惯性导航系统(简称机载捷联惯导)是一种依赖于惯性测量数据和惯性“数学平台”的导航系统[1]。由于“数学平台”的精度直接影响到整个导航系统的精度,因此,人们希望得到接近实际的“数学平台”。实际上,“数学平台”的精度主要取决于惯性测量传感器的精度、传感器数据处理算法、导航解算及初始对准校正算法方法的有效性[2-3]。尽管已经出现多种新型的野值剔除方法、性能优越的惯性测量滤波器以及改进的卡尔曼滤波器,并成为捷联惯导算法的研究热点[4-7],但毕竟还是理论研究,需要接近实际的验证环境,以便更好地得到应用。
系统仿真和性能评价为捷联惯性导航系统的方法研究、算法实现和技术验证提供了解决途径。文献[8]研制了一种用于捷联惯性导航系统理论研究的仿真器,其信息源模拟了一些典型的运动过程,但对于飞机运动而言,这些模拟是不够的;文献[9]系统描述了Matlab的主要功能和常用函数,具备矩阵运算、微分方程求解和控制系统闭环仿真等数字仿真功能,因此,对于由坐标变换、微分方程、矩阵运算和闭环控制回路为主的捷联惯性导航算法,可采用Matlab进行数字仿真;文献[10]系统描述装备效能评估的一般方法,系统仿真和效能评价计算是一种有效的途径。对于由测量数据处理、导航解算和初始对准等组成的捷联惯性导航系统,其性能指标体系由导航误差的精度指标和快速性指标来共同决定,通过建立性能评价指标体系,并进行性能指标的加权计算,给出综合评价是可行和可信的。
1 系统组成和结构
系统由数字仿真系统和性能评价系统两部分组成,图1给出了系统的结构示意图。数字仿真系统由惯性导航信息源、数据处理、滤波器、导航解算等信号仿真器组成;性能评价系统由惯性测量数据处理、导航解算、初始对准等评价器组成。
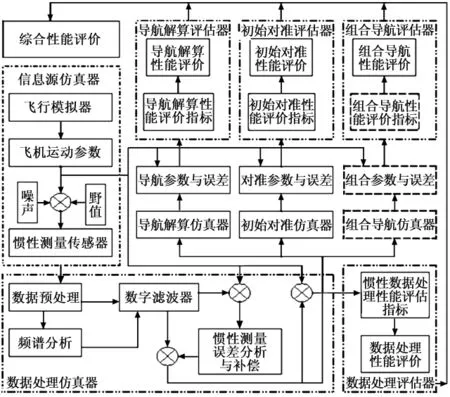
图1 捷联惯导数字仿真与性能评价结构图Fig.1 Digital simulation and performance evaluation structure of SINS
2 信息源仿真器设计
2.1 功能
基于飞行仿真软件,模拟全状态飞行运动信息,产生与惯性导航系统数字仿真和性能评价有关的飞行参数列表。设计专门的实时/历史数据库,将仿真数据存放在实时/历史数据库中,以便捷联惯导系统数字仿真和性能评价时使用。
2.2 仿真模型
图2给出了飞行仿真系统的基本模型示意图,它由六自由度飞行动力学模型和六自由度运动学环节组成,并受控于飞行操纵系统和动力控制系统,具有自动飞行控制的模拟功能,可实现给定航向飞行、航迹飞行和综合飞行的数字仿真,以提供接近实际的飞行数据,满足捷联惯导数字仿真对惯性导航信息源的需求。
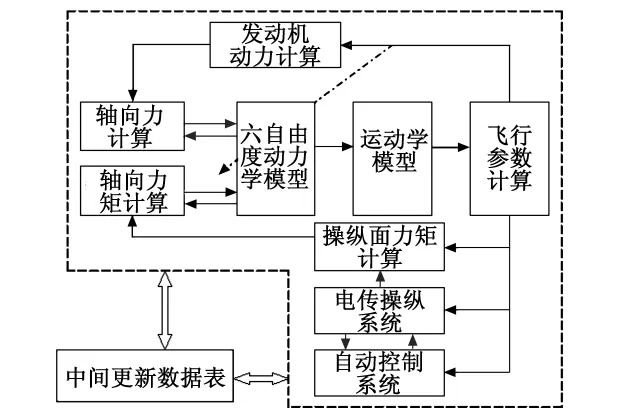
图2 飞行仿真原理图Fig.2 Principle of flight simulation
2.3 仿真器设计
该仿真器采用VC编制,也可以用Matlab来实现。飞行仿真器需要将飞机操纵系统、动力控制系统、自动飞行控制系统和飞机机体动力学模型相互交联组成一个闭环仿真系统,使操纵规律、动力控制规律和飞行动力学模型相匹配。仿真器的环境参数设置和参数输出均通过中间更新数据库表来实现,外接运行监控软件。为此,该仿真器设置了如表1所示的子模块。

表1 飞行模拟仿真器子模块Table 1 Submodules of the flight simulator
捷联惯导信息源通过中间更新数据库表来实现,并保存在实时/历史数据库中。
表2给出了该仿真器所产生的捷联惯导信息源。

表2 捷联惯导信息源Table 2 Information source of SINS
3 数据处理仿真及评价
3.1 功能
面向捷联惯导数据处理算法设计、验证的需要,仿真器的输入为含有噪声的原始惯性测量数据。经过数据预处理、趋势分析、标准化处理、频谱分析和数字滤波,输出为处理后的惯性测量数据,使得惯性测量数据能够最佳地逼近实际惯性数据。进行标准误差信号的零均值检验、平稳性检验和正态性检验,评价数据预处理的有效性。计算处理数据和飞行仿真器数据之间的误差序列,检验误差的分布特性和绝对值时间累加性能,评价其有效性。
3.2 仿真模型
仿真模型如图3所示。原始信号来自于飞行仿真器的飞行仿真数据,并引入了噪声。预处理用于剔除数据源中具有明显误差的野值,确定数据的趋势项,得到标准化数据。进而,对标准化数据进行频谱分析,根据频谱特性设定滤波器类型和参数。在此基础上,对标准化数据进行数字滤波,滤除数据中的干扰成分,最终得到处理后的数据。

图3 数据处理模型与评价Fig.3 Digital process model and its evaluation
3.3 仿真器设计
该仿真器由数据预处理、频谱分析、IIR滤波器设计与实现、随机时间序列建模、卡尔曼滤波器等子模块组成。子模块直接采用Matlab工具箱或根据Matlab提供的函数库来编制,详见表3。

表3 数据处理仿真器子模块Table 3 Submodules of digital process simulator
这些子模块依次运行,完成如图4所示的数据处理过程仿真,实现其中的数据处理仿真计算。图4中μ表示均值,σ为标准差,表示X的估计值。

图4 惯性测量数据处理过程Fig.4 Inertial measurement data process
3.4 评价器设计
根据飞行仿真器产生的机体加速度和机体角速度数据与对应的处理数据之间的误差序列,绘制出这些误差序列的时间分布曲线,并计算如下参数。
均值

方差

过渡过程时间

时间累计性能


4 导航解算仿真及评价
4.1 功能
在对惯性测量数据的补偿和各种处理后,将得到精度相对较高的惯性测量数据,进一步进行坐标系变换仿真,转化为平台坐标系的加速度计信号和角速度信号。为了实现坐标转化,必须得到姿态矩阵,还可进行姿态航向角的仿真计算。另外,还要仿真计算位置矩阵,以便完成位置参数计算。通过构想的数学平台及其导航方程实现速率更新仿真计算、角速度更新仿真计算以及其他相关的参数仿真计算。
4.2 仿真模型
导航解算的仿真模型结构图如图5所示。
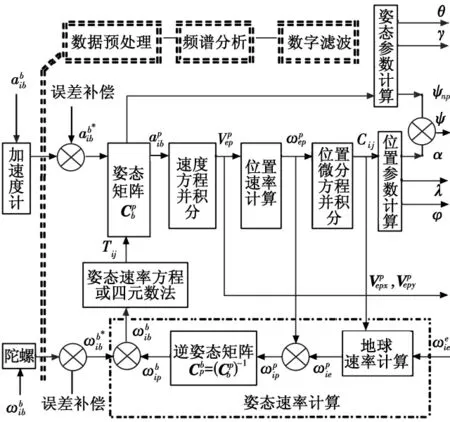
图5 导航解算模型Fig.5 Model of navigation algorithm
由位置矩阵表达式、位置微分方程、位置速率方程、速度方程组成导航位置方程,计算位置矩阵,并由此计算位置参数λ,φ,α和速度参数由姿态矩阵表达式、姿态微分方程、四元数计算、姿态速率方程组成姿态方程,计算姿态矩阵,并由此计算姿态参数 γ,θ,ψnp。
4.3 仿真器设计
该仿真器由相互关联的位置导航模块和姿态模块两部分组成。由位置矩阵计算、位置微分方程求解、位置速率微分方程求解、速度微分方程求解等子模块构成位置导航模块;由姿态矩阵计算、姿态微分方程求解、四元数计算、姿态速率方程求解等子模块构成姿态模块。子模块直接采用Matlab提供的函数库来编制,详见表4。这些子模块互相交联,完成如图5所示的导航解算仿真,实现位置参数、速度参数和姿态参数的仿真计算。

表4 导航解算仿真器子模块Table 4 Submodules of navigation algorithm simulator
4.4 评价器设计
与数据处理的评价器相类似,可以得到导航解算评估指标J2。首先得到飞行仿真器产生参数与导航解算导航参数误差分别计算均值、方差、过渡过程时间和时间累积性能4个性能指标,依次定义和 ρ2i,得到


5 初始对准仿真及评价
初始对准仿真及评价的基本思路类似于导航解算仿真及评价。对准过程仿真分为粗对准仿真和精对准仿真,其基本原理如图6所示,而对准性能主要取决于φx,φy,φz是否确切地反映了理想坐标系和平台坐标系之间的偏差角。

图6 初始对准原理Fig.6 Principle of initial alignment
表5给出了初始对准仿真计算子模块,可直接由Matlab来实现。

表5 初始对准仿真器子模块Table 5 Submodule of initial alignment simulator
依据 φx,φy,φz的变化曲线,分别计算其均值、方差、过渡过程时间和时间累积性能4个参数,依次定义jC3i和ρ3i,得到

6 综合评价
综合评价是综合考虑数据处理、导航解算和初始对准等性能的评价。作为一种高精度的捷联惯性导航系统,首先需要一个性能满意的数据处理方案,即具有较小的J1,以确保输入惯性加速度数据和角速度数据的精度。进一步,在导航过程中,需要完成导航解算,其中涉及姿态矩阵的计算和位置矩阵的计算,两者的计算精度和实时性要求取决于微分方程的求解方法选择和参数设定,需要合理选择计算方法和参数,以获取较小的J2。此外,在初始对准阶段,需要完成平台误差角的计算和姿态矩阵的修正计算,其计算时间和实时性要求取决于所选择的对准算法和参数,以获取较小的J3。于是,在数字仿真的基础上,计算出数据处理性能评价结果J1、导航解算性能评价结果J2和初始对准性能评价结果J3,建立总体评价指标为

其中,β1+ β2+ β3=1,且 β1,β2,β3均为大于零的实数。
性能评价指标的选择和评价参数的设定,需要综合考虑大量的惯性导航性能分析研究成果。值得指出,性能评价参数 ρ1i,ρ2i,ρ3i及 βi的选择直接影响着评价结果,取决于性能指标的侧重方向。对于高精度的机载捷联惯性导航系统,其运行时间一般在一个小时以上,惯性测量环境十分复杂,尤其强调惯性测量数据处理方法的有效性。为此在计算J1、J2和J3时,要全面考虑各个指标j1i,j2i,j3i。对于重点参数的评价系数要大一些,反之,则小一些。对于数据处理而言,惯性加速度误差指标和角速度误差指标同样重要,一般选择同等权重。对于初始对准和导航解算而言,注重精度和计算时间,对应的权重应该选择得大一些。研究表明,高精度捷联惯性导航的数据处理方法是进行捷联惯性导航性能评价的重点,也是提高捷联惯性导航系统总体性能的前提。因此,在进行捷联惯性导航数字仿真和性能评价研究的过程中,一般选取β1>0.5。初始对准的结果直接影响着导航解算的精度,一般选取β3>0.25,表现为初始对准比导航解算更加重要(即β2<0.25)。随着对捷联惯性导航性能研究的深入,可以引入更加合理的性能指标和加权系数设定方法,提高性能评价的真实性。
7 结论
本文系统描述了捷联惯性导航的数字仿真系统的组成、功能、实现和性能评价方法,可以直接用于数据处理方法、导航解算和初始对准算法的技术验证和性能评价,对于研制高精度的捷联惯性导航系统具有重要作用。同时,本文提出的系统仿真思路和性能评价方法,也可用于组合导航系统的数字仿真和性能评价。
[1] 张宗麟.惯性导航和组合导航[M].北京:航空工业出版社,2003:135-155.
[2] 袁信,郑谔.捷联式惯性导航原理[M].南京:航空专业教材编审组,1983.
[3] 胡剑波.航行驾驶综合体航空设备[M].西安:空军工程学院,1992.
[4] 李汉舟,杨孟兴,李国辉,等.数字信号处理技术在陀螺多位置寻北仪中的应用[J].中国惯性技术学报,2005,13(2):14-18.
[5] 郑佳华,王宏力,段小庆,等.自适应卡尔曼滤波器在SINS静基座初始对准中的应用[J].电光与控制,2008,15(6):88-90.
[6] 刘涛,赵国荣,潘爽.无陀螺捷联惯导系统角速度解算的新方法[J].系统工程与电子技术,2010,32(1):162-165.
[7] SUN F,BEN Y Y,GAO W,et al.Adjustment on separatebias Kalman filter during initial alignment of SINS[C]//IEEE International Conference on Control and Automation,2007:2311-2316.
[8] 刘柱,陈勤,高为,等.捷联惯性导航系统仿真器的总体设计[J].应用科技,2004,31(7):40-42.
[9] 楼顺天,李博菡.基于MATLAB的系统分析与设计—信号处理[M].西安:西安电子科技大学出版社,2001.
[10] 郭齐胜.装备效能评估概论[M].北京:国防工业出版社,2005.
