水轮发电机组控制系统辨识研究
2012-08-24靳永卫
靳永卫
(浙江仙居抽水蓄能有限公司,浙江 仙居 317300)
水轮机调节系统是一个具有非最小相位的复杂非线性时变系统,其精确模型描述一直以来都是相关研究的重点及难点。系统辨识是依据试验数据构建系统模型的一种理论与方法,适用对系统机理难以获得的对象进行建模,逐步成为一种重要的建模手段。采用系统辨识理论建立水轮机调节系统模型可以精确表达系统特性,克服因机理不清或结构难以描述造成的水轮机及调速器液压系统等非线性系统建模的难题,能为水轮机调节系统精确建模提供重要技术保障。开展水电机组控制系统辨识研究工作对水电机组模型精确描述具有重要意义,并为水电机组状态监测及故障诊断提供了理论及技术支持,为实现水电机组自适应优化控制奠定了基础,对提高生产效率及保持系统稳定性意义重大。
1 系统辨识理论
系统辨识是作为控制理论的一个学科分支在60年代末开始形成并迅速发展的,与状态估计和控制理论是现代控制论中相互渗透的三个领域,系统辨识的发展离不开控制理论的支持,控制理论的应用又几乎不能没有系统辨识技术的支撑。
1.1 系统辨识定义
系统辨识是在已知或测得系统输入和输出数据的基础上,从一组给定的模型类中,确定一个与所测系统等价的模型。系统辨识要素为:①数据:指系统过程的输入数据和输出数据,它是辨识的基础。②模型类:指各种已知的系统过程模型集合,它是辨识时寻找模型的范围。③等价准则:指系统行为相似性、系统效用等同性的识别标准,它是辨识优化的目标。辨识的实质就是按某种准则,从一组已知模型类中选择一个模型,使之能最好地拟合实际过程的动态特性。观测数据含有噪声,因此辨识建模实际上是一种实验统计的方法,所获得的模型只是与实际过程的外特性等价的一种近似描述。
1.2 统辨识算法的原理与实现
(1)系统辨识算法的原理。系统辨识算法根据过程提供的测量信息,按照最优准则,估计模型未知参数,如图1所示。
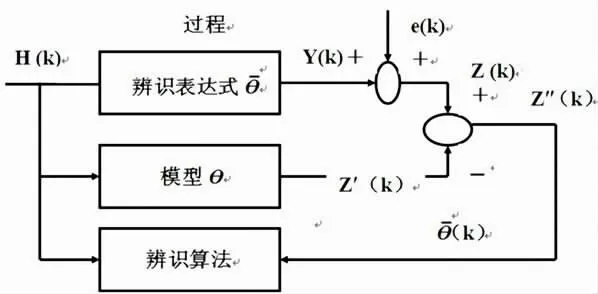
图1 系统辨识原理图
通常采用逐步逼近获取模型参数θ的估值θ′,根据(k-1)时刻的估计参数,计算出k时刻的预测值、预测误差。
Z′(k) =H T(k)θ′(k-1);Z″(k) =Z(k)-Z(k)
输出量和输入量均可测量的,预测误差反馈到辨识算法中,在最优准则条件下,计算出k时刻的模型参数估计值θ(k),并据此更新模型参数。不断迭代,直至准则函数取最小值。此时模型输出Z′(k)也已在该准则下最好地逼近过程的输出值Z(k),模型即为最佳。
(2)系统辨识建模的实现。参数设计是建模的基础。必须合理选择输入信号、采样时间、辨识时间、开环或闭环辨识、离线或在线辨识等参数或方式,目的是使采集数据序列尽可能多地包含过程特征的内在信息。模型结构辨识是建模的前提。必须明确模型的基本构型,如动态或静态、离散或连续、线性或非线性等模式。同时要对模型参数予以辨识。模型检验是建模的重点。模型的可靠性须经多方面的检验。输入数据和输出数据都要进行零均值化和剔除高频成分的预处理,预处理直接影响辨识精度。模型实验设计是建模的最终标准。实验输入信号必须体现系统动态性能,应能使给定问题的辨识模型精度最高;采样速度不低于信号截止频率的两倍,与模型应用时的采样时间尽可能保持一致,并尽可能顾及辨识算法、控制算法的计算速度和执行机构、检测元件响应速度等问题。
2 水电机组辨识研究现状
近些年,国内外学者对水电机组控制系统辨识研究越来越关注,针对水电机组控制系统建模中存在的问题及难点,展开了大量的系统辨识研究,文献中所述方法大致有三类:最小二乘法、神经网络模型和智能优化法。
(1)最小二乘辨识法。对于线性模型辨识,最小二乘方法法是一种广泛应用且行之有效的方法。最小二乘法辨识模型就是求出使实际观测值与模型计算值之差的平方和达到极小值的参数值作为辨识结果。
水轮机线性模型虽然在工程中得到广泛应用,但也存在一些问题,进行控制参数整定时,一组控制参数只能在某些工况下达到控制目标,其他工况下可能控制效果不佳。为提高控制效果,提出并推导了水轮机模型六参数辨识算法,实现了基于最小二乘的水轮机线性模型在线辨识。文献结合抽水蓄能电站机组现场试验,采用具有复杂输水系统的大型机组水力系统模型,利用增广最小二乘法对功率扰动下实测数据进行模型辨识,结果证明了利用功率扰动试验可以辨识水电站水力系统模型。
文献提出一种新型最小二乘辨识算法,并推导了其递推形式,在算法中引入了遗忘因子,避免了识别饱和现象,此外在水轮机模型辨识试验中无需施加二位式伪随机信号(P R B s)扰动信号,且能得到较高辨识精度。文献进行了水轮机调节系统被控对象辨识,建立被控对象的离散参数模型,提出了一种加入遗忘因子的迭代最小二乘算法,提高了辨识效率,仿真试验表明提出的算法是可行的。
(2)神经网络模型。神经网络模型是一种非线性系统辨识方法,具有较强的非线性逼近能力,在高度非线性系统建模预测与控制方面应用广泛神经网络模型辨识就是利用测量的系统输入输出,运用神经网络拟合得到系统模型。
在水电机组压力引水系统辨识中,文献采用神经网络的方法对多传感器的数据进行数据融合,利用神经网络的非线性映射的能力构建系统模型,试验表明通过神经融合的方法可以更好地描述待辨识系统的非线性特征。水轮机调节系统中的液压随动系统具有强非线性特性,特别是其死区非线性难以精确辨识,死区的存在会恶化调节品质并给系统带来稳态误差。
水轮机综合特性呈现强非线性,用近似线性模型来描述水轮机模型必然要牺牲精度。为对水轮机进行精确建模,学者们利用神经网络的非线性映射能力进行水轮机的非线性辨识研究。常江等利用前馈神经网络强大的非线性逼近能力建立混流式和轴流转桨式水轮机的神经网络模型,实现了水轮机调节系统的非线性仿真,能快速准确的描述系统在各工况点的特性。程远楚等用B P神经网络描述水轮机单位流量和单位力矩特性,真实地表达了水轮机的非线性特性,解决了插值法的导数不连续问题,在仿真中改善了水击计算的收敛性。文献利用自适应模糊神经网络(PSTA)较强的非线性逼近能力对水轮机非线性特性进行了辨识,训练算法采用最小二乘和梯度下降结合的算法,试验表明辨识模型能很好地描述水轮机特性,为研究智能水轮发电机控制策略提供了有效的建模方法。
(3)智能优化方法。模型类和准则是系统辨识的要素。考虑这种情况:给定系统的模型类,模型的结构是一定的,模型随参数的变化而变化,假定辨识准则为实际观测值与模型计算值之差的平方最小,系统辨识就是从模型类中寻找一个模型,使模型输出与实测数据误差最小,则辨识问题可以转换成参数优化问题。随着智能优化方法的蓬勃发展,基于智能优化方法的系统辨识逐渐引起人们的关注。
对于水轮机调节系统这类复杂非线性系统,线性辨识方法,如最小二乘法、分段线性多项式函数法(PLPF)无法描述系统的非线性特性,而网络方法如神经网络在辨识物理模型参数方面存在困难,而智能优化方法则为非线性系统参数辨识提供了一种有效地解决途径。文献将遗传算法应用于水轮机调节系统参数辨识中,保留并考虑了系统的非线性特性,利用遗传算法的全局寻优能力辨识出了对象参数,试验表明,辨识效果比无法考虑系统非线性特性的PLPF法要好。
3 结语
水轮机调节系统是一个复杂的时变、非线性系统,水轮机调节系统建模的难点在于水轮机的模型描述。水轮机是水电站的核心设备,是水电机组控制系统中的控制对象,其模型综合特性呈现复杂的非线性,且无法用解析模型表达。水电机组辨识的首要目的是建立对象的精确模型,为仿真研究、系统稳定性分析及调速器控制策略研究提供模型支持。单一的系统辨识方法各有优缺点,难以满足复杂系统建模全部要求。因此,将多种系统辨识方法合理地结合在一起,发挥各自的优点,形成综合智能系统辨识方法,将是水电机组系统辨识的发展方向。
[1]刘宪林,杜晓勇.利用功率扰动辨识水电站水力系统模型[J].郑州大学学报(工学版),2006,27(3):104-106.
[2]张承慧,刘玉庆.水轮机建模与参数识别[J].电力系统自动化,1997,21(5):53-56.
[3]刘昌玉,梁学磊.水轮机调节系统被控对象模型辨识[J].水电能源科学,2007,25(2):77-79.
[4]杜庆东,徐凌宇,赵海.基于神经融合算法的水电厂压力引水系统的辨识[J].控制与决策,2001,16(51):787-790.
[5]常江,陈光大.轴流转桨式水轮机神经网络建模与非线性仿真[J].中国农村水利水电,2004,(7):82-85.
[6]程远楚,叶鲁卿,蔡维由.水轮机特性的神经网络建模[J].华中科技大学学报(自然科学版),2003,31(6):68-70.
[7]王淑青,李朝晖.基于自适应模糊神经网络的水轮机特性辨识研究[J].武汉大学学报(工学版),2006,39(2):24-27.
[8]杨小东,董哀,卢文华,等.基于遗传算法的水轮发电机组调速系统参数辨识[J].继电器,2006,34(l):27-30.
[9]杨全潮.基于非线性模型的水轮机调速系统智能辨识.电机技术[J],2008,(9):79-81.
