基于模糊PID的配浆池液位控制器的设计
2012-08-22景晓渝宝鸡职业技术学院电子信息工程系陕西宝鸡721013
景晓渝(宝鸡职业技术学院电子信息工程系 陕西 宝鸡 721013)
0 引言
配浆池是几种浆料以及辅料混合后的成浆贮存,以便为纸机提供合适的浆料,配浆池液位过低将不能提供纸机用浆,配浆池液位过高,有可能溢浆,造成浆料浪费,因此配浆池液位的控制有重要的价值,而常规PID控制器由于其算法简单,可靠性高,无静差,并且可以通过调节PID控制器的参数而应用于各种不同的对象,尤其适用于可建立精确数学模型的对象,但由于实际工业过程中的被控对象具有滞后,时变,非线性,不确定等特点,常规PID不具有在线整定参数的功能,且响应速度较慢,而模糊控制响应速度虽快,但它是一个PD控制器,不能消除静差。所以本文将两者结合起来,设计出模糊PID控制器,对配浆池液位进行控制,可达到较好的效果[1-2]。
1 PID参数模糊自整定控制系统结构
将模糊控制器和PID控制器结合在一起,构造了一个模糊PID控制器,利用模糊推理的方法调整PID控制器的参数,并利用MATLAB的SUMLINK工具箱,对系统进行仿真。
以配浆池液位的误差e和误差变化量ec作为模糊控制器的输入量,以满足不同e和ec对控制器参数的不同要求,根据模糊合成推理设计PID参数的模糊矩阵表。
2 各变量隶属度函数的确定
取配浆池液位误差e和误差变化量ec,将其模糊化到相应论域。模糊化过程是通过比例变换因子将采样获得的具体值论域变换到模糊语言变量论域,取输入语言变量e和ec的论域均为 e,ec={-6,-4,-2,0,2,4,6}, 其模糊子集为 e,ec=NB,NM,NS,ZO,PS,PM,PB。输出语言变量 Δkp 和 Δkd 的论域均为 Δkp,Δkd={-6,-4,-2,0,2,4,6},Δki的论域为Δki={-0.6,-0.4,-0.2,0,0.2,0.4,0.6}, 模糊子集为 Δkp,Δki,Δkd=NB,NM,NS,ZO,PS,PM,PB。e、ec、Δkp、Δki、Δkd 语言变量的隶属度函数均采用三角形隶属度函数[3]。
3 PID参数模糊自整定的原则
模糊自整定PID参数的目的是使参数Kp,Ki,Kd随着e和ec的变化而自行调整,故应首先建立它们之间的关系,根据实际经验,参数Kp,Ki,Kd在不同的e和ec下自调整要满足如下调整原则:
(1)当e较大时,为加快系统响应速度应取较大Kp;同时为避免由于开始时e的瞬时变大可能出现的微分过饱和而使控制作用超出许可范围,应取较小Kp;为防止出现较大超调,产生积分饱和,应对积分加以限制,取Ki为零。Kp、Ki、Kd分别表示比例(P)、积分(I)、微分(D)作用的参数。
(2)当e和Δe处于中等大小时,为使系统具有较小的超调,Kp应取小一些,Ki取值要适当,Kd要大小适中,以保证系统响应速度。
(3)当e较小,即接近设定值时,为使系统有良好的稳态性能,应增加Kp、Ki取值,同时为避免系统在设定值附近出现振荡,并考虑系统抗干扰性能,当Δe较大时,Kp可取小一些;e较小时,Kd取大一些。
4 仿真研究
利用Fuzzy Toolbox工具箱,构造 e,ec双输入、称kp、ki、kd三输出的模糊控制系统。利用上面所建的隶属函数和控制规则在MABLAB环境中实现仿真研究。在SIMULINK中建立FUZZY-PID控制器的仿真模型如下图所示。
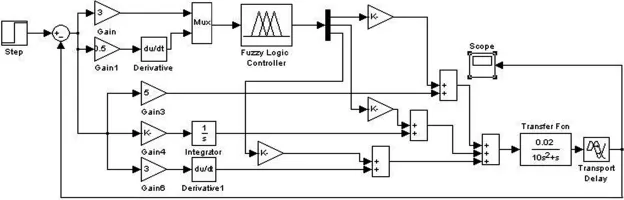
图1 配浆池液位控制仿真系统
由于采用了模糊控制的方法对PID参数进行调整,使在偏差较大时使kp增大,提高了系统的响应速度,在中间过程抑制了系统响应出现的超调,在接近稳态时kp,ki增大,kd减小,使系统缩短了稳态时间,抑制了振荡。与传统的PID控制器相比,用模糊自适应PID控制器控制配浆池液位,控制精度高,动态性能好,鲁棒性强[4]。
5 结束语
本文将模糊自适应控制算法应用于对配浆池液位得控制系统中,利用模糊控制易于实现对复杂对象控制的特点,将操作人员和专家的控制经验应用于控制过程,根据人工控制规则组织控制决策表,由该表决定PID参数的输出值,在线实时的对PID参数整定,使系统运行中保持合适的瞬态参数,达到了改善控制过程的动态,稳态性能,另一方面由于模糊PID算法采用查表法,因而也提高了运行速度,缩短了调节时间。
[1]王亚刚,邵惠鹤.自整定PID控制器的研究综述[J].电气自动化,2000,22(1):7-9.
[2]董继先.模糊PID控制器在碱回收炉的应用[J].轻工机械,2009,27(3):43-46.
[3]王孟效,孙瑜,汤伟,等.制浆造纸过程测控系统及工程[M].北京:化学工业出版社,2003:311-312.
[4]殷云华,樊水康,陈闽鄂.自适应模糊PID控制器设计和仿真[J].火力与指挥控制,2008,33(7):96-99.
