机械式半主动控制橡胶节点的计算机仿真
2012-08-16刘高明
刘高明,沈 钢
(同济大学铁道与城市轨道交通研究院,上海201804)
在设计转向架和优化车辆悬挂系统的参数时,车辆工程师必然要面对的一个最基本的矛盾就是车辆运行的蛇行稳定性和曲线通过性能两者之间的协调问题,同时考虑铁道车辆在曲线段的钢轨及轮缘磨耗问题[1-3]。如果城市轨道交通线路复杂,曲线半径较小,其轮缘磨耗及钢轨侧磨问题将更为突出,它不仅增加了脱轨事故的可能性,频繁的镟轮和钢轨更换也给城市轨道交通的运营带来了巨大的经济负担,同时轮缘咬切钢轨产生的啸叫声会直接影响到车辆的乘坐舒适性,也对城市环境造成了噪声污染。目前解决这一问题的主要方法有4种。
1)选用不同的悬挂策略。列车主动悬挂控制是自动控制理论在列车随机振动平稳性控制上的应用,相对于无控制的被动悬挂系统而得名。列车主动悬挂控制是指列车在运行过程中,通过振动传感器实时地检测车体和根据算法需要是否检测构架振动大小,将检测出的振动值按一定的评价指标或控制算法计算出相应的控制量,将控制量通过驱动放大作用于执行元件或执行机构改变列车悬挂系统特性,即实时调节悬挂系统的“软硬”特性,以适应列车不同线路和不同运行状况,最大限度的抑制车体振动,从而提高列车运行平稳性[4-6]等。主动悬挂按其控制过程中系统是否需要外界提供能量,可分为主动悬挂控制和半主动悬挂控制[7-9]。沈钢教授[10-11]和一些业内人士提出了一种采用力作用元件对轮对施以摇头运动闭环控制的方法,结果表明该主动控制导向转向架能根据转向架在曲线轨道上的受力环境,使轮对以较合理姿态通过曲线,最佳地利用轮轨间的蠕滑力,减小轮轨磨耗。但是,这些传统的悬挂控制方式在应用上各有优点和缺点,都不能同时解决车辆的曲线通过性能与稳定性,以及降低轮轨磨耗等动力学问题,如全主动悬挂系统因需要油压和气压等动力源,存在稳定性问题和控制系统故障后的安全问题,而采用横向半主动悬挂方式将使轮对动力学性能恶化[12]等。
2)优化车辆的设计参数。周劲松教授等人[13]以转向架轴箱定位刚度为设计变量,采用折中优化的方法得到了一系定位刚度参数在可行域内的最优解;He Yuping等人[14]以轮对冲角,横向力和纵向力之间的比值的加权函数为优化目标,采用遗传算法方法自动搜索最优参数。这些都是从优化设计的角度去解决车辆稳定性与曲线通过之间的矛盾。
3)采用液压阻尼式橡胶衬套。Jerry Evans[15]使用一种液压阻尼式橡胶衬套来代替普通径向转向架的轴箱定位节点。该橡胶衬套内设有阻尼通道,利用其阻尼特性可实现低频低刚度和高频高刚度的动态特性。通过仿真和试验的方法验证了该橡胶衬套能够在保证车辆直线稳定性的前提下,提高曲线通过性能。但是该衬套容易产生高温现象,并且不易散热,进而易使橡胶老化,影响其整体功能的充分实现。
4)对轮轨进行涂油润滑。在曲线段对轮轨进行涂油润滑,能够降低轮轨间的摩擦系数,对减小轮轨磨耗起到一定作用,且该方法经济性较高,然而摩擦系数的降低会限制车辆牵引力的发挥,从而影响车辆的动力性能,同时,钢轨表面的油液会影响轮轨的滚动接触疲劳特性,为钢轨和轮对的疲劳破坏埋下隐患。
这些传统的方法,对于解决车辆稳定性与曲线通过性能之间的矛盾,理论分析上比较繁琐,实际应用上仍有局限性,难以使车辆的动力学性能有进一步的改善。
1 机械式半主动控制轴箱定位装置
机械式半主动控制轴箱定位装置由离心式控制机构和机械式橡胶节点构成,而其控制的“半主动”性,正是由这两个特殊机构来实现。离心式控制机构安装在一个旋转的部件上,以其转速,即系统内的能量,而不是由系统之外的能量作为控制信号和动力源,控制机械式橡胶节点内滑阀的移动,进而调整橡胶节点的刚度,以满足车辆稳定性和曲线通过性能对橡胶节点纵向刚度的不同需求。
1.1 离心式控制结构
图1为离心式控制机构的简图,该控制系统是无源主动悬挂控制系统,即半主动控制悬挂系统,其不需要系统外部能量的输入,而仅仅以轮对转速为动力源,通过该机构实时调节机械式橡胶节点的刚度值,从而改善悬挂系统的动力学性能。如图1所示,安装盘安装在轴端的旋转部件上,并由其带动转动,当达到一定转速时,摆臂在离心力作用下产生摆角,进而推动拉杆产生一定的位移。预紧弹簧为拉杆提供回复力,同时可以通过改变弹簧的预压缩量调节机构作动所需的转速。
1.2 机械式橡胶节点基本结构
可变刚度装置以轮对速度为控制信号,由机械式橡胶节点(如图2所示)的滑阀在芯轴中的位置来调控刚度的变化。当滑阀无滑动而处于芯轴的中间位置时,则橡胶节点的总体刚度由滑阀,芯轴,橡胶体,止挡托盘,止挡和外套筒共同决定,刚度较大,约为10~12 MN·m-1;而当滑阀被拉绳或弹簧拉到芯轴的一侧时,橡胶节点的总体刚度由芯轴、橡胶体、止挡托盘,止挡和外套筒共同决定,此时的刚度较小,约为3~5 MN·m-1。
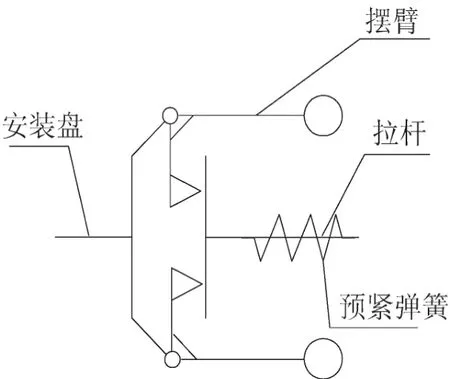
图1 离心式控制机构Fig.1 Centrifugal control mechanism
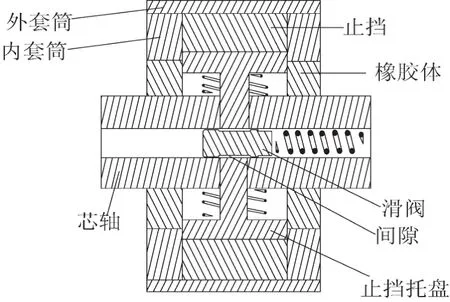
图2 机械式橡胶节点结构简图Fig.2 Sketch of mechanical rubber point
1.3 机械式半主动控制悬挂系统控制原理
传统的半主动悬挂系统是为克服全主动悬挂系统所需的较大控制能量和高成本作动器而提出的。该系统由于改变刚度值同样需要较大的能量,而改变阻尼器的阻尼值相对容易实现,所以根据优化车辆动力学性能的需要,如何调整二系最佳阻尼值使之能够满足各动力学性能对该参数的需求,是其关键问题。与传统半主动悬挂系统相比,机械式半主动控制轴箱定位悬挂的显著特点是:通过测量装置对轮对的速度进行测量,根据速度的大小,来控制橡胶节点的滑阀位置,进而调节橡胶节点整体刚度,而不需要考虑调控最佳阻尼值,控制策略简单有效。轮对的速度既是信号源,又是动力源,不存在动力源不稳定而造成的控制策略失效等问题。
2 机械式橡胶节点动力学特性的计算机仿真
使用SIMPACK搭建四轴客车整车模型,对车辆在一般工况下的稳定性及曲线通过性能进行计算机仿真,以验证该新型定位装置的工程应用价值,查看其在不同工况下的工程应用可行性。表1是整车模型参数,其中“较优刚度Kl”是指新型轴箱定位装置在半主动控制下能够实现的刚度值,该刚度能同时满足车辆稳定性与曲线通过对纵向刚度的需要。“一般刚度Kh”是指传统情况下,轴箱定位装置能够提供的刚度,该刚度不能有效满足车辆稳定性与曲线通过对纵向刚度的需求。

表1 车辆模型参数Tab.1 Parameters of vehicle model
2.1 机械式橡胶节点对车辆曲线通过性能的影响
整车模型分别在3种曲线计算工况下运行,如表2所示。

表2 曲线通过计算工况Tab.2 Parameters of calculation cases for curve passing
图3~图6分别是不同动力学指标的仿真结果,图中Kl和Kh分别是车辆在曲线段时,新型橡胶节点和传统轴箱定位装置能够提供的纵向刚度,R1~R3则是不同的曲线半径,V1~V3是在相应工况下的试验速度。

图3 轮对外轮冲角Fig.3 Attack angles of the outer wheels
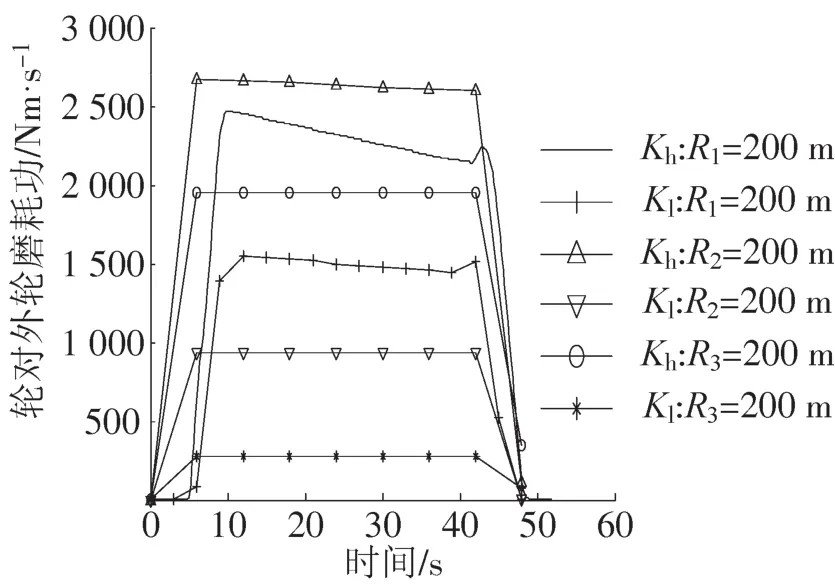
图4 轮对外轮磨耗功Fig.4 Wear of the outer wheels

图5 轮对外轮横向力Fig.5 Lateral force of the outer wheels
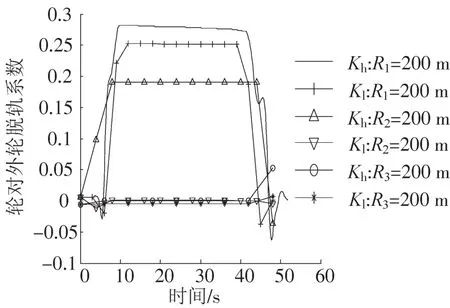
图6 轮对外轮脱轨系数Fig.6 Derailment coefficient of the outer wheels
从图3,图4,图5可以看出,轮对的冲角,横向力及磨耗量随曲线半径的增大而减小,稳定性增强,反之亦然。当曲线半径较小时,新型橡胶节点与传统轴定位节点相比,能够有效降低轮对冲角,轮对横向力、轮轨磨耗量。如表3所示。

表3 新型橡胶节点对车辆曲线通过性能的影响Tab.3 Influences of new rubber nodal points on curve passing performance
从表3可以看出,与传统轴箱定位节点相比,车辆通过曲线半径较小的路径时,该机械式半主动控制轴箱定位节点对车辆曲线通过性能的改善很明显。当曲线半径为400 m时,机械式半主动控制轴箱定位节点能使轮对冲角降幅达到77.2%,横向力降幅达到67.9%,磨耗量降幅达到64.6%,车辆的脱轨系数降幅达到99%;当曲线半径为800 m时,机械式半主动控制轴箱定位节点能使轮对冲角降幅达到77.2%,横向力降幅达到46.4%,磨耗量降幅达到85.9%,车辆的脱轨系数降幅达到93.8%。由此可见,机械式半主动控制橡胶节点适用于小曲线半径的工况。
2.2 机械式橡胶节点对车辆稳定性的影响
由于车辆的稳定性随着轮对等效斜度的增大而降低,所以为了考察机械式橡胶节点对车辆稳定性的影响,在此采用等效斜度为0.4的磨耗型踏面与60 kg·m-1的钢轨组合,计算了当一系纵向定位刚度为3 MN·m-1和横向定位刚度为22.5 MN·m-1,轮轨粘着系数为0.6时的非线性临界速度,以考察其在较坏工况下的稳定性。仿真结果显示车辆的初始速度约为170 km·h-1,经过一段轨道激励后出现蛇形失稳现象,然后到达133 km·h-1时明显收敛,最低值约为100 km·h-1。由此可见,机械式橡胶节点能明显提高车辆在较坏工况下的稳定性。
3 结论
四轴客车轴箱定位装置,引入机械式半主动控制橡胶节点后,用多体动力学仿真软件SIMPACK对车辆在不同工况下的曲线通过性能进行动力学仿真分析,得出以下结论:
1)在车辆通过曲线时,机械式半主动控制橡胶节点能够有效降低轮对冲角,轮对横向力、轮轨磨耗量,改善车辆曲线通过性能及安全性,有效克服传统悬挂控制系统的缺点。引入机械式半主动控制橡胶节点的车辆,尤其适用于小曲线半径的工况。当曲线半径为200 m时,机械式半主动控制轴箱定位节点相对于传统轴箱定位节点而言,能使轮对冲角降幅达到37.2%,横向力降幅达到12.6%,磨耗量降幅达到38.9%,车辆的脱轨系数降幅达到10.6%。
2)机械式橡胶节点能显著提高车辆在较坏工况下的稳定性能,使其维持在较高的运行速度。
3)通过对机械式半主动控制橡胶节点在四轴客车模型上的仿真分析,证实了该设计方案为解决车辆稳定性和曲线通过性能之间的矛盾提供了新的方法,而其应用的可行性和可靠性还有待在实践中做进一步的论证。
[1]任利平.曲线钢轨侧磨原因及预防措施[J].铁道建筑,2004(12):47-48.
[2]乔青峰.地铁车辆车轮踏面异常磨耗原因初探[J].铁道车辆,2011(49):28-32.
[3]卢奕志,刘永明.车轮与曲线钢轨接触的有限元分析[J].华东交通大学学报,2011,28(5):63-65.
[4] SARMA GN,KOZIN F.An active suspension system design for the lateral dynamic of a high-speed wheel-rail system[J].Journal of Dynamic Systems,Measurement,And Contro1,1971(86):233-241.
[5]CELINIKER G W,HEDRICK J K.Rail vehicle active suspensions for lateral rail and stability improvement[J].Transaction of theASME,1982(104):100-106.
[6] GOODALL R M.Active controls in ground transportation:a review of the state-the-art and future potential[J].Vehicle system dynamic,1983,12:225-257.
[7]顾仲权,马扣根,陈卫东.振动主动控制[M].北京:国防工业出版杜,1997:1-222.
[8]丁文镜.振动主动控制当前的主要研究课题[J].力学进展,1994,24(2):173-180.
[9] GOODALL E M.Active railway suspension:implementation status and technological trends[J].Vehicle System Dynamics,1998(12):87-l17.
[10]沈钢,赵惠祥.主动转向式转向架的理论研究[J].上海交通大学学报,1997,18(2):13.
[11]沈钢,黎冠中.非对称半主动控制径向转向架的仿真研究及方案设计[J].铁道车辆,2002(40):3.
[12]陈健,王开文.半主动悬挂机车平稳性和曲线通过动力学性能仿真研究[J].机车电传动,2006(3):40-43.
[13]周劲松,赵洪伦,王福天.铁道车辆稳定性与曲线通过性能折衷最优化研究[J].铁道学报,1998,6(3):1-8.
[14]YUPING HE,MCPHEE JOHN,TRUE HANS.Design optimization of rail vehicles with passive and active suspensions:A combined approach using genetic algorithms and multibody dynamics[J].Vehicle System Dynamics,2002(37):397-408.
[15] JERRY EVANS.Application of the hall hydraulic radial arm bush to a 200 km/h inter-city coach[C]//Stockholm&Manchester:22nd International Symposium on Dynamics of Vehicle on Roads and Tracks,2011:1-6.
