基于标记点的图像配准
2012-08-15卢韶芳费斌陈运聪王海风
卢韶芳 费斌 陈运聪 王海风
(吉林大学通信工程学院,吉林 130025)
计算机视觉通过对图像的数字感知和理解来模拟人类视觉,通过对三维世界所感知的二维图像来研究和提取出三维景物的物理结构.图像配准技术在计算机视觉中有广泛的应用,如为运动分析,三维形状估计,图像拼接和目标识别等.而在医学图像分析方面,图像配准能用来进行图像引导手术,医疗诊断等.将计算机视觉,医学图像以及图像处理、精密机械和外科手术等相结合,形成了一个新的研究方向——计算机辅助外科.外科手术导航系统具有提高手术精度、减少手术创伤、缩短愈合时间和降低手术风险等优点.在外科手术视觉导航系统中,图像配准是该系统的主要组成部分,图像配准的精度将直接影响到导航系统的精确.
目前常用的配准方法有基于灰度和基于特征2种.基于灰度的图像配准主要是利用像素的灰度值来寻找图像对中的像素点的对应关系,计算量大.基于特征的图像特征,主要是对图像的角点、边缘等进行配准,不直接依赖于灰度,具有较强的抗干扰性,计算量小,速度快.但是直接进行特征提取的往往都存在误匹配特征,所以本文提出外加标记点的配准方法,该方法不受被测物体形状限制,且辅助标记点具有易于制作、成本低、操作方便等优点[1-2].
1 配准方法设计
1.1 标记点设计
在本文中标记点设计[3]成蓝色的圆,这样既容易提取区域,又能方便提取质心.考虑到物体的大小,该标记点大小设计为直径6 mm.针对物体特征,设计8个标记点,标记点的位置如图1所示.
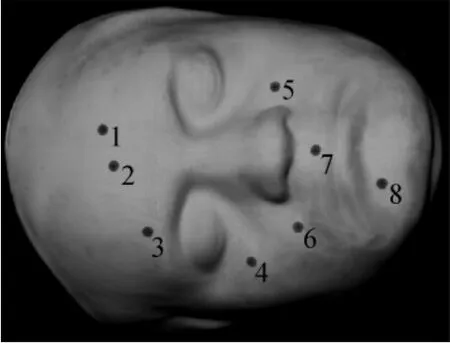
图1 标记点设计
根据面部特征和后期图像配准需要,由于标记点过少会影响后期配准的效果,太多则会影响处理的速度,所以本文设计8个标记点.标记点1,2和3设计在额头上,此处相对平坦,且所占区域较大,所以在此处设计3个标记点,眼睛处不易设计标记点,此处特征较多,不易提取标记点,鼻子高耸,也不设计标记点,尽量选择标记点在一个平面之上,这样才能保证后期的误差在允许范围内,设计时两两点之间的距离需要保证有一定的偏差,任意2点连成的线相互不能平行,尽量要无序,没有任何规则.
1.2 链码
链码[4]是用于表示有顺次连接的具有指定方向的直线段组成的边界线.8段链码如图2中所示.
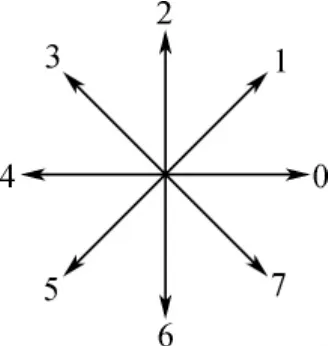
图2 8段链码
用链码表示特征点之间的关系时,当目标发生平移和缩放时,点与点的链码不会发生变化,而当目标发生旋转时,链码会发生变化,但是链码对之间的关系还是保证不变的,差分链码还是没有发生变化,所以,旋转、平移和缩放不对特征点对间的差分链码形成影响,利用这个特性,我们使用链码对图像进行配准.配准时,如果形成的差分链码完全相同,那么对应点即为配准点.
2 标记点配准
加标记点的图像配准,首先拍摄左右两幅图像,然后对左右图像分别进行预处理,提取标记点,接着计算标记点的质心,对计算出来的标记点质心利用链码进行配对,最后计算出旋转和平移的参数.配准流程[5-6]如图3所示.

图3 标记点配准流程图
2.1 预处理
采集完的图像一般不能直接是用来进行处理,由于在图像获取、传输和处理过程中,人为的失误和设备的误差,难免产生一些干扰或噪声,所以在图像处理前先进行一下图像的预处理.图像预处理的目的是消除或尽量减少噪声的影响,改善图像的质量.主要包括图像剪切,亮度的增强,图像滤波等操作.
2.2 质心提取
预处理完后,提取出标记点的区域,然后提取标记点的质心.质心提取公式如下:
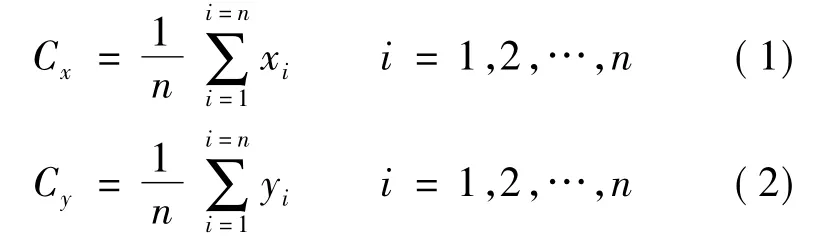
式中,Cx,Cy分别为计算出来的质心坐标;xi,yi分别为标记点区域内的第i个像素坐标值;n为标记点的个数.
2.3 标记点配准
由于使用标记点进行配准的时候,提取的质心不存在误配准点的情况,所以不需要对提取的质心进行删选,提取的质心即可用来配准.由于空间位置关系的不变形,可以使用特征点间的欧氏距离来区分各特征点.使用链码进行配准时,首先必须选取一个点作为起始点,则选取欧式距离最小的其中一个点.配准步骤如下:
步骤1 利用之前计算得到的标记点质心坐标,计算各标记点质心间的欧式距离;
步骤2 找出最小的质心距离,取其中任一点为起点,另外一点为第2个点,形成链码;
步骤3 寻找离第2个点最近邻的一个点(排除前一个点),形成链码,如此一直下去,最后将第8个点和起点形成链码;
步骤4 计算链码的一次差分,形成新的链码,比较左右两图的差分链码是否相同,若相同则对应点为匹配点,如不同,返回到步骤2,取另外的那个点为起始点,形成链码,再判断是否相同.
通过上面的步骤即能得到匹配的对应点对,然后使用点对坐标进行参数计算.
2.4 参数计算
由于人体头模可近似为刚体,因此主要通过计算旋转与平移参数来完成图像配准.配准点对之间的映射关系可以表示为

确定配准点对之后,利用链码的角度来计算待配准图像的旋转角度.首先判断θi-θi'>θ,θ为阈值,当超过这一阈值就将该角度剔除.然后利用式(4)计算旋转角度.

式中,θi和θ'i分别为配准点对集合.
接着计算配准的平移参数.首先,把图4(a)按计算得到的旋转角度进行角度校正,对校正后的图像再进行特征点提取,确定配准点对.对配准点分别对X轴、Y轴的坐标值做差并对差值进行累加求平均值,得到最终的平移量.
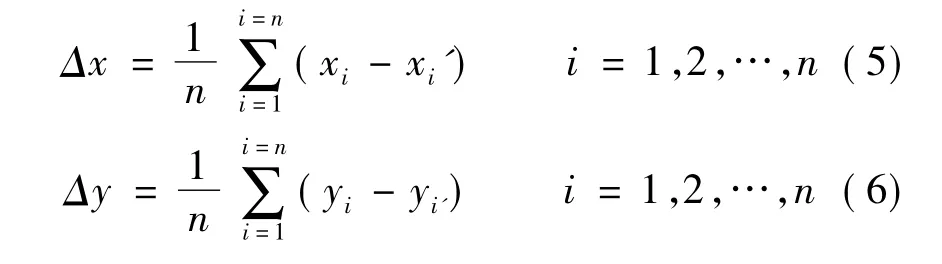
式中,xi和xi'为对应配准点对的X轴坐标值,yi和yi'为对应配准点对的Y轴坐标值.
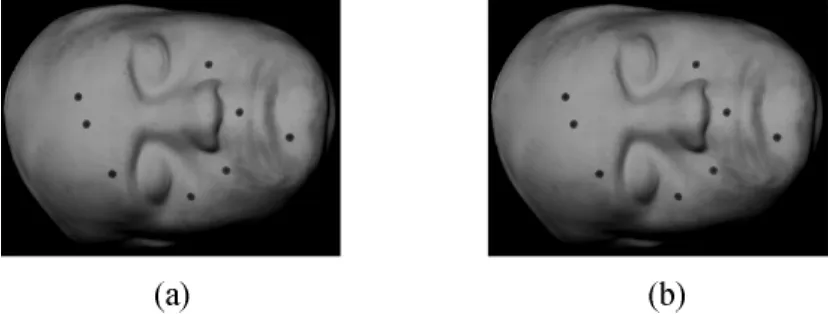
图4 加标记点头模图像
3 实验结果分析
实验用左右2个摄像机分别对加标记点的头模进行拍摄,得到左右2幅图像如图4所示.
对图4进行图像增强等操作后,提取得到左右图像的标记点,然后再计算出质心坐标,实验结果如图5所示.

图5 标记点及其质心
利用之前计算得到的标记点质心坐标,形成链码,如图6所示.图7为图6链码做差分后形成的链码.最后得到图7(a)和(b)图像中的配准点对如图8所示.

图6 标记点链码
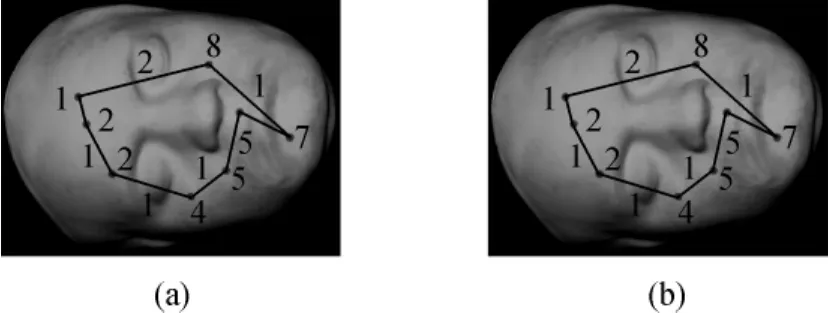
图7 标记点差分链码
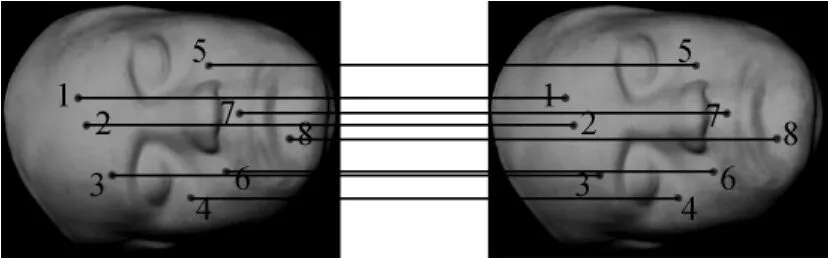
图8 标记点差分链码
配准点对如表1所示,左右坐标为空间像素点所在位置.
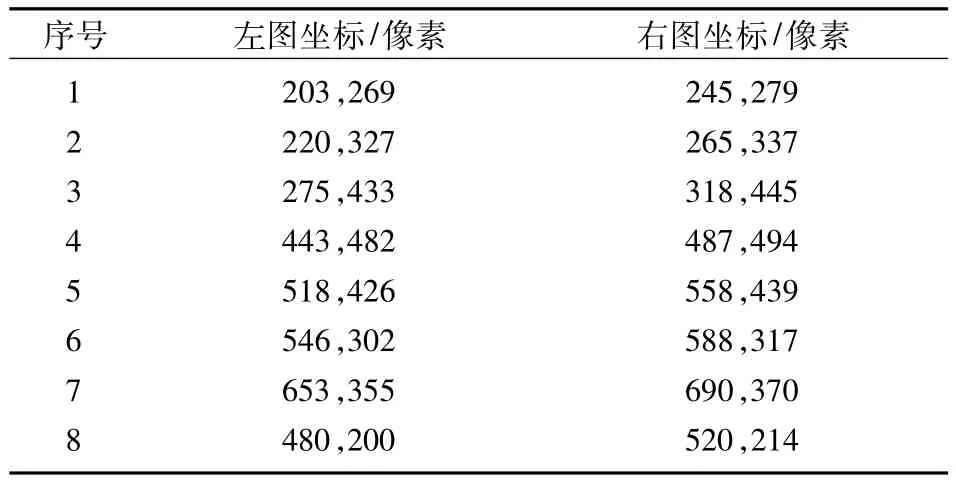
表1 配准点对
图9为不同角度下拍摄的图像配准点对.
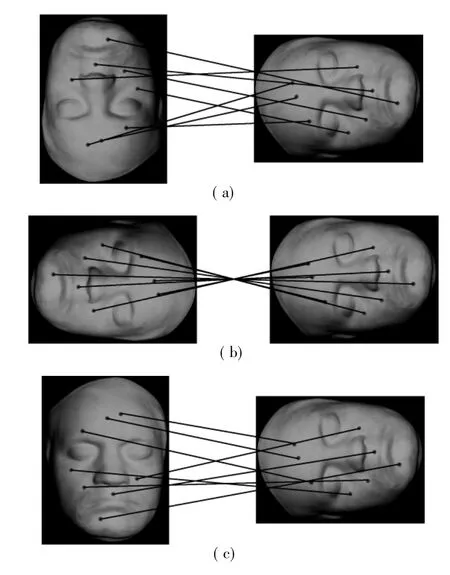
图9 不同角度质心配准
图10为配准之后2幅图像叠加在一起的效果图.表2为配准后x和y方向的误差.
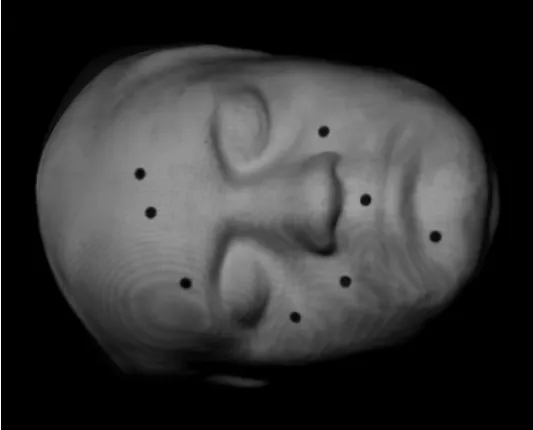
图10 配准后结果图
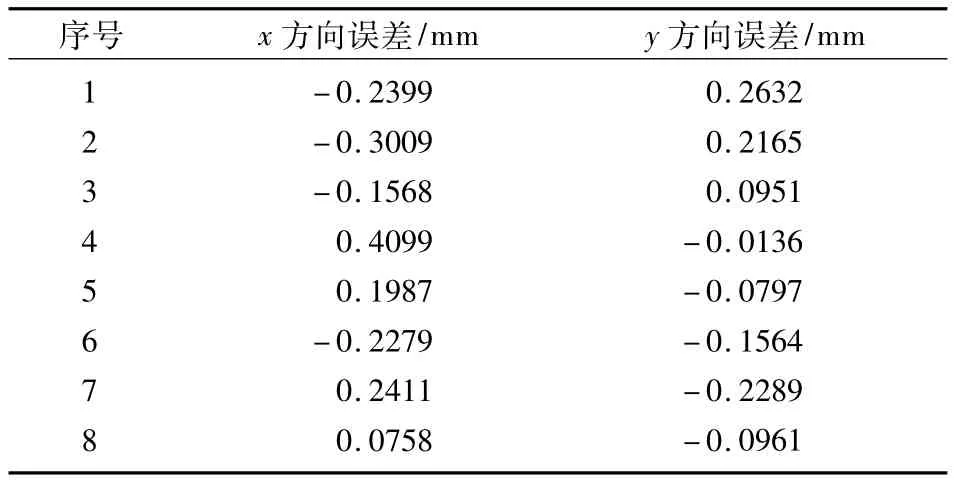
表2 标记点误差
4 结语
本文提出的基于标记点的配准方法可以获得准确的特征点信息,经多次匹配尚未发现误匹配点,这样减少了误配准点剔除工作,简化了问题.且配准点少,减少了计算量,提高了配准的计算速度,实验结果表明,该方法操作比较简单,成本低,容易实现,该方法对平移和旋转配准精度高,并且有较强的抗噪声性能并能达到很好的精度.
References)
[1]Zhang Qi,Zhang Zhijiang,Zeng Dan.A fast automatic and robust image registration algorithm[C]//International Conference on Virtual Reality and Visualization.Qinhuangdao,China,2011:307-310.
[2]Cosar Serhan,Cetin Mujdat,Ercil Aytul.A robust facial feature point tracker using graphical models[C]//Proceedings of the 5th International Symposium on image and Signal Processing and Analysis.Istanbul,Turkey,2007:551-555.
[3]韦虎,刘胜兰,张丽艳,等.双目立体测量系统中的标记点配准算法研究[J].中国机械工程,2009,20(14):1736-1740.Wei Hu,Liu Shenglan,Zhang Liyan,et al.Reference point based registration algorithm for binocular stereo vision system[J].China Mechanical Engineering,2009,20(14):1736-1740.(in Chinese)
[4]Jana R,Ray C.Image registration using object shape's chain code[J].The 2nd International Congress on Image and Signal Processing.Tianjin,China,2009:1-5.
[5]马丙辰,谌海新,马桂珍.基于标记点的刚体图像配准方法研究[J].计算机工程与应用,2005(6):68-71.Ma Bingchen,Chen Haixin,Ma Guizhen.Rigid-body image registration based on landmarks[J].Computer Engineering and Applications,2005(6):68-71.(in Chinese)
[6]Hong Gang,Zhang Yun.Combination of featurebased and area-based image registration technique for high resolution remote sensing image[J].IEEE International Geoscience and Remote Sensing Symposium.Barcelona,Spain,2007:377-380.
