基于COP偏移量视觉反馈的人体姿态镇定
2012-08-13裴立力李洪谊伏云发李江涛
裴立力 李洪谊 伏云发 李江涛
1(中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳 110016)
2(山西大学物理电子工程学院,太原 030006)
3(中国科学院研究生院,北京 100049)
4(中国电信太原分公司,太原 030002)
引言
人体姿态镇定,源自英文stabilization of posture及 postural stabilization,其“镇定”含义与控制领域类似,是指人体控制及调整自身姿态,以达到稳定姿态或改善姿态稳定性的目的。人体姿态镇定,在老年人平衡辅助、体育运动平衡保持及下肢残障人士康复运动理疗等领域有着广阔的应用前景。在人体姿态镇定的众多影响因素当中,视觉的作用尤为突出[1-3]。视觉反馈技术进一步扩充了视觉的姿态感知功能,将由姿态测量仪器测得的人体姿态状况以视觉信号的形式反馈给人体[4-6],其对人体姿态的镇定作用成为当前姿态控制研究的热点[4-9]。
然而,目前关于视觉反馈对人体姿态镇定作用的研究多集中于疾病康复与平衡能力改善,研究者大多关注于视觉反馈对诸如帕金森与中风病人等病变或术后人群人体姿态控制的作用[7-9],对健康人体视觉反馈的姿态影响研究较少,而关于健康人体的研究是发掘人体姿态控制机制的必要环节,对于合理设计疾病康复训练方法和平衡能力恢复方案具有重要的指导作用。Rougier曾将人体足底压力中心(center of pressure,COP)运动轨迹通过显示器反馈给健康青年人,并发现其COP位移方差显著减小[10]。但Rougier采用的这种视觉反馈方式要求被试对象通过COP相邻点的相对位置差异来判断自身姿态状态,反馈信息不够明确,增加了被试对象的负担;且相对位置差异对于COP的整体漂移不敏感,COP信息利用得不充分。Cawsey研究视觉反馈增益范围时,在COP运动轨迹基础上增加了姿态平衡点显示[2],其姿态反馈信息比 Rougier明确;但Cawsey未描述其反馈信号的具体形式,且其实验时间过长,难以排除被试对象疲劳及自身特性变化等因素对视觉反馈姿态镇定作用的影响。
针对上述研究的不足,为充分利用COP信息,笔者设计了基于COP偏移量的视觉反馈指示器,通过对比、分析健康青年人在静态与视觉反馈两种视觉条件下人体姿态摇摆特性的变化,揭示视觉反馈对人体姿态控制的镇定作用及其发生机制。
1 材料和方法
1.1 被试对象
12名健康青年志愿者(女性2名,男性10名)参与了姿态测试。被试对象年龄(26.4±2.6)岁,身高(170.1±6.3)cm,体重(66.2±9.1)kg。所有被试对象均无姿态及与之相关的肌肉、骨骼、神经疾病,视力正常或矫正视力正常。本实验项目由中科院沈阳自动化研究所批准,所有被试对象对实验内容均知情同意。
1.2 实验设备
姿态实验在2.5 m×4.0 m的封闭实验区进行,实验环境及设备如图1所示。视觉场景由固定于天花板的投影仪(Toshiba TDP-T355)投射到悬挂于墙壁的投影屏幕(1.5 m×2.0 m)上,被试对象面对投影屏幕站立在与屏幕水平相距2.2 m处的测力台(Kistler 9286BA)上,测力系统通过数据采集卡(NI PCI-6229)与计算机主机相连。
1.3 视觉条件
在静态条件下,视觉场景由1.5 m×2.0 m的黑色背景与直径160 mm的白色目标圆斑(视角范围约为3.7°)组成(见图2(a)),目标圆斑固定于黑色背景之上。在视觉反馈条件下,视觉场景中增加了与目标圆斑相同半径的蓝色参考圆环,目标圆斑与参考圆环构成视觉反馈指示器(见图2(b)),圆环标记COP参考位置固定于黑色背景之上;圆斑位置由软件控制,依据测力台测得的当前姿态信息,可跟随被试对象COP变化而运动,跟随速率与姿态信号采样率一致。该指示器可明确指示当前COP位置相对于参考位置的偏移量,而参考位置由特定时段的COP位置均值计算,可适应不同被试对象姿态控制特性的差异。

图1 实验环境及设备((1):投影屏幕;(2):测力台;(3):主机;(4):投影仪;(5):被试;(6):主试)Fig.1 Schematic representation of experimental environment and apparatus((1):Screen;(2):Force platform;(3):Computer;(4):Projector;(5):Subject;(6):Experimenter)

图2 视觉场景示意。(a)静态;(b)视觉反馈Fig.2 Schematic representation of static and feedback visual scenes.(a)Static;(b)Feedback
1.4 实验过程
被试对象光脚站立在测力台上,双脚分开与肩同宽,双手自然悬垂身体两侧,双眼水平注视投影屏幕上的目标圆斑,如图1所示。
在静态视场条件下,要求被试对象尽量保持身体直立静止,双眼始终注视固定目标圆斑。
在视觉反馈条件下,测试前5 s,目标圆斑静止,要求被试对象尽量保持身体直立静止,双眼注视固定圆斑;5 s结束时,计算前 5 s COP均值,位置COPref作为参考位置;5 s结束后,目标圆斑依照被试对象当前COP相对于COPref的偏移量运动。目标圆斑的上下(左右)运动对应于当前COP向前(向左)或向后(向右)偏离 COPref,圆斑运动幅度正比于COP相对COPref的偏离量。在目标圆斑运动时,要求被试对象尽量利用踝关节来调节自身姿态控制目标圆斑,使其尽量与参考圆环重合。
正式测试开始前,被试对象须进行多次练习,以确保其完全领会并能严格执行实验要求。在实验过程中,两种视觉条件各重复5次,同一被试对象共需完成10组测试,测试顺序随机。每组测试时长设为70 s,测试完毕要求被试对象坐下休息至少1 min,测试数目过半后,被试对象休息3 min以上。
1.5 实验数据记录与分析
姿态数据采集程序基于LabView 8.5 DAQmx编写,每一测试均全程记录人体姿态摇摆COP的运动轨迹,采样频率设为1 kHz。
测试完成后,原始COP序列经由截止频率6 Hz的四阶ChebyshevⅡ型低通滤波器来滤波,该滤波器的通带无纹波特性可有效保护低频段姿态信息。此外,为剔除实验中不确定因素(如姿态控制中的瞬态现象、被试对象对实验结束的预期等)的影响,仅截取中间60 s(第8 s~第68 s)的COP数据作为有效姿态数据,采用统计学方法进行分析。
采用姿态稳定性推荐参数COP位移均方根(RMS)和平均速度(MV),在前后(AP)、左右(ML)方向及位移平面(PL)考察人体姿态控制位移及速度特性。位移计算公式为

式中,i=AP,ML,PL,n=1,…,N,N=60000(本节n,N 均取该值),xi[n]为滤波后的 COP 轨迹对其均值点COPref的偏移序列。速度计算公式为
式中,j=AP、ML,T=60 s。
为考察人体姿态摇摆范围的变化,采用了面积参数——95% 置信椭圆面积 EA[11],有
利用中位频率 MPF(median power frequency)[11],在AP和ML方向上考察了两种视觉条件下人体姿态控制的频率特性,有

式中,Δf=1/60 Hz为频率分辨率,M为使得下式成立的最小整数,即

式中,psd[m]为 xAP[n]或 xML[n]的功率谱密度。
依据上述表达式计算每一测试对应的姿态参数,取同一被试各视觉条件下5次重复测试的姿态参数平均值,作为同一被试两种视觉条件下的姿态控制特性参数值;利用配对样本t检验,查验两种视觉条件下各特性参数的差异显著性(显著性水平设为α=0.05);取全体被试对象各特性参数的平均值,计算各特性参数均值变化率的百分比,有

式中,PAfb、PAst分别为全体被试对象在视觉反馈与静态视觉条件下的各姿态控制特性参数的均值。
2 结果
2.1 人体姿态摇摆位移特性变化
图3展示了两种视觉状态下人体姿态摇摆位移均方根的统计结果。由图可知,与静态视觉条件相比,在视觉反馈条件下,COP偏移序列位移均方根在AP、ML方向及平面 PL上均显著减小。该结果表明,视觉反馈有助于有效抑制COP变化幅度。
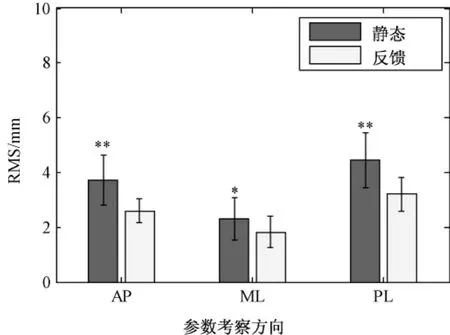
图3 两种视觉状态下位移均方根对比Fig.3 Root mean square comparison between static and visual feedback conditions(* :P< 0.05;**:P<0.01)
2.2 人体姿态摇摆速度特性变化
图4对比了两种视觉条件下人体姿态摇摆平均速度统计特性的变化。由图可见,与静态条件相比,视觉反馈使得 COP位移的平均速度在 AP、ML方向及平面PL上均显著增大。这一结果表明,视觉反馈的引入可加快人体对自身姿态的调节。
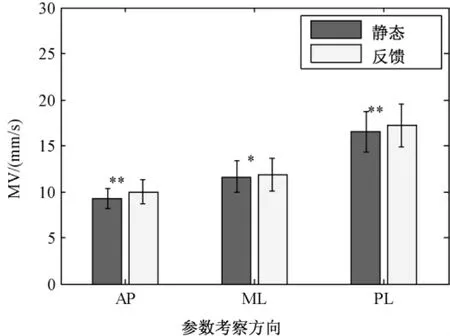
图4 两种视觉状态下平均速度对比Fig.4 Mean velocity comparison between static and visual feedback conditions(*:P<0.05;**:P<0.01)
2.3 人体姿态摇摆范围变化
图5给出了两种视觉状态下人体姿态摇摆的95%置信椭圆对比,其中的COP偏移曲线取自被试对象2的第3次重复测试。由图5可以清晰地观察到,与静态视觉条件相比,视觉反馈条件下的95%置信椭圆明显减小,在AP及ML方向上椭圆覆盖范围均减小一半左右。

图5 两种视觉状态下95%置信椭圆对比。(a)静态;(b)视觉反馈Fig.5 Example of COP deviation and 95%confidence ellipse.(a)Static;(b)Feedback
全体被试对象姿态摇摆95%置信椭圆面积的统计结果如图6右侧坐标所示。由该图可见,与静态视觉条件相比,在视觉反馈条件下95%置信椭圆面积EA显著减小。这表明:视觉反馈信息有助于抑制COP的大幅运动,减小了人体姿态摇摆的范围。
2.4 人体姿态摇摆频率特性变化
图6左侧坐标给出了两种视觉条件下COP偏移序列中位频率的统计结果。该结果显示,在视觉反馈条件下,AP及ML方向上的中位频率均有显著提高,表明视觉反馈的引入使得人体姿态摇摆频率由低频向高频方向移动,这与前述COP偏移序列平均速度的增大一致。

图6 两种视觉状态下的中位频率及95%置信椭圆面积对比Fig.6 Comparison of median power frequency and 95%confidence ellipse area between static and feedback conditions(**:P<0.01;***:P<0.001)
2.5 人体姿态特性参数均值变化率
表1列出了由式(6)计算的各特性参数均值的变化率:平均速度和位移均方根均在AP、ML方向和平面PL上考察其变化;95%置信椭圆参数为面积量,仅在平面 PL上考察其变化;对于中位频率,由于姿态数据测试长度限制了频率分辨率,使其在平面PL上难以分辨,故只考察其AP及ML方向上的变化。表1结果显示,平均速度、位移均方值及置信椭圆面积在前后方向上的变化率均大于左右方向上的变化率。
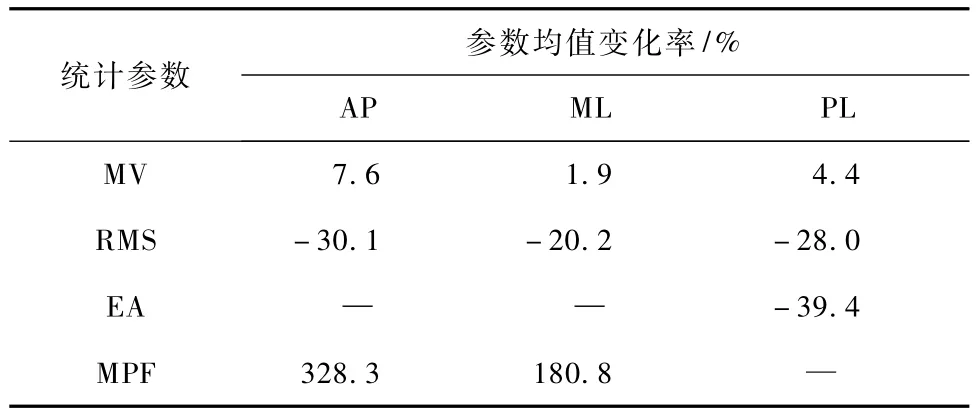
表1 人体姿态特性参数的均值变化率Tab.1 Percentage change of means of the postural parameters
3 讨论
3.1 视觉反馈对人体姿态控制的镇定作用
COP偏移序列位移均方根与置信椭圆均是普遍公认的描述人体站立姿态稳定性的重要参数。本实验结果显示,在基于COP偏移量的视觉反馈指示器的提示下,被试对象COP偏移序列位移均方根与95%置信椭圆面积均显著减小。该结果表明,在视觉反馈状态下,人体姿态摇摆的幅度和范围均得到了明显抑制。从抑制人体姿态摇摆的意义上来说,视觉反馈显著增强了人体对自身姿态摇摆的控制,有效改善了人体姿态控制的稳定性,体现了视觉反馈对人体姿态控制的镇定作用。
3.2 视觉反馈姿态镇定作用的方向差异
对比前后方向与左右方向上的平均速度、位移均方根及中位频率的差异显著性及变化率,可以发现:两种视觉条件下人体姿态摇摆的差异,在前后方向上比在左右方向上表现得更为明显。
视觉反馈姿态影响上述方向的差异,可能与本姿态实验考察的双足站立方式有关。本实验采用两脚分离的站立姿态,这种站姿可以在左右方向上提供更稳定的支撑,而前后方向上人体姿态的稳定性则相对较差。因此,视觉反馈提供的人体姿态摇摆信息,在前后方向上更能补偿人体自身姿态感知的不足,进而使视觉反馈对人体姿态控制的镇定作用在前后方向上表现得更为突出。
3.3 视觉反馈姿态镇定作用的产生机制推断
由图6和表1给出的中位频率统计结果可见,在视觉反馈条件下,人体姿态控制频率在前后方向与左右方向上均有显著提高,且提高幅度较大。与此同时,图4和表1的平均速度统计结果显示,在视觉反馈条件下,人体姿态控制调节速度显著增大。据此推断,视觉反馈的姿态镇定作用极可能与姿态控制频率的提高有关。视觉反馈提供由姿态测量设备获取的姿态信息,可克服人体自身姿态感知灵敏度与精度的制约,帮助人体更及时、准确地获取当时姿态的状况,进而促使人体加快自身姿态调整节奏,采取更为有效的姿态控制策略,在产生较大姿态摇摆之前,及时纠正姿态偏差,达到镇定姿态的效果。
4 结论
本研究设计了视觉反馈指示器,并以此考察了视觉反馈对静止直立人体姿态控制的镇定作用。研究发现:基于COP偏移量的视觉反馈,可有效地减小人体姿态摇摆幅度,缩小摇摆范围,对人体姿态控制有明显的镇定作用;并且,这种镇定作用表现出方向差异性,在前后方向上镇定作用表现得更为明显;视觉反馈姿态镇定作用的产生可能与人体姿态控制频率的提高有关。本研究结果可为临床康复与平衡能力恢复的训练提供借鉴。
[1]Uchiyama M,Demura S.Low visual acuity is associated with the decrease in postural sway[J].Tohoku J Exp Med,2008,216:277-285.
[2]Moraes R,Lopes AG,Barela JA.Monocular vision and increased distance reducing the effects of visual manipulation on body sway[J].Neurosci Lett,2009,460(3):209-213.
[3]Streepey JW,Kenyon RV,Keshner EA.Field of view and base of support width influence postural responses to visual stimuli during quiet stance[J].Gait Posture,2007,25:49-55.
[4]Pinsault N,Vuillerme N.The effects of scale display of visual feedback on postural control during quiet standing in healthy elderly subjects[J].Arch Phys Med Rehabil,2008,89:1772-1774.
[5]Cawsey RP,Chua R,Carpenter MG.,et al.To what extent can increasing the magnification of visual feedback of the centre of pressure position change the control of quiet standing balance[J].Gait Posture,2009,29(2):280-284.
[6]Vuillerme N,Bertrand R,Pinsault N.Postural Effects of the scaled display of visual foot center of pressure feedback under different somatosensory conditions at the foot and the ankle[J].Arch Phys Med Rehabil,2008,89:2034-2036.
[7]ˇCakrt O,Chovanec M,Funda T,et al.Exercise with visual feedback improves postural stability after vestibular schwannoma surgery[J].Eur Arch Otorhinolaryngol,2010,267(9):1355-1360.
[8]Sayenko DG,Alekhina MI,Masani K,et al.Positive effect of balance training with visual feedback on standing balance abilities in people with incomplete spinal cord injury[J].Spinal Cord,2010,48(12):886-893.
[9]Levy-Tzedek S,Krebs HI,Arle JE,et al.Rhythmic movement in Parkinson's disease:effects of visual feedback and medication state[J].Exp Brain Res,2011,211(2):277-286.
[10]Rougier P.Influence of visual feedback on successive control mechanisms in humans assessed by fractional Brownian motion modeling[J].Neurosci Lett,1999,266:157-160.
[11]Prieto TE,Myklebust JB,Hoffmann RG,et al.Measures of postural steadiness:differences between healthy young and elderly adults[J].IEEE Trans Biomed Eng,1996,43(9):956-966.