两船干扰力测试系统开发
2012-08-11明姚朝帮
叶 明姚朝帮
(1.海军驻上海地区舰艇设计研究军事代表室 上海200011;2.海军工程大学 船舶与海洋工程系 武汉430033)
0 引 言
当今海运中,舰船编队海上补给与大型商船海上拖带等现象越来越普遍。为指导编队海上补给以及商船海上拖带时两船的具体操纵规律,需探究两船或多船并列航行时相互之间的水动力干扰规律。国内外关于该课题都开展了广泛的理论研究[1-4],相比之下,试验研究较少,主要原因是:两船水动力干扰试验装置较为复杂,研制过程较为繁琐;试验成本较高且各种试验仪器接口、通信方式不统一,数据采集复杂,试验难度较大。
为验证理论计算方法和实现工程应用,开展两船水动力干扰试验必不可少。试验过程中会涉及多个力传感器的数据采集,故开展基于Labview软件的干扰力数据采集分析系统的开发,并在此基础上实现力传感器的标定。
Labview是基于图形编译(Graphics,G)语言的虚拟仪器软件开发平台,它具有数据采集、数据分析、信号生成、信号处理、输入输出控制等功能。与传统编程采取的文本语言相比,Labview使用G语言编程,界面更加友好直观,是一种直觉式图形程序语言[5]。
基于Labview平台的多通道数据采集系统开发较多,如金仁江等开展了基于Labview软件的多通道温度测控系统设计[6],吴俊勇等开展了基于Labview平台的多通道低温测试试验系统的研发[7]。他们开展的研究为本文提供了思路,但是由于他们的研究都针对具体的应用对象,因此开发的系统或程序只适用于他们所使用的传感器,很难直接应用到其他类型传感器的数据采集系统中。
为进一步增强开发系统应用的广泛性和通用性,本文开发了基于串口通信方式的数据采集软件,并进一步开发了多通道数据分析软件,在此基础上探讨了力传感器的标定方法。
1 系统设计
1.1 力传感器
两船水动力干扰试验要测量两船各自的阻力与横向力,横向力采用前后两个横向力传感器测量,阻力采用拉力传感器测量。因此,两船作用力测量时共有6个力传感器。阻力传感器型号为CHLBS,采用电流输出方式,输出电流为4~20 mA,对应于量程0~50 N。横向力传感器型号为HGH,采用电压输出方法,量程为0~30 N。传感器实物如图1所示。
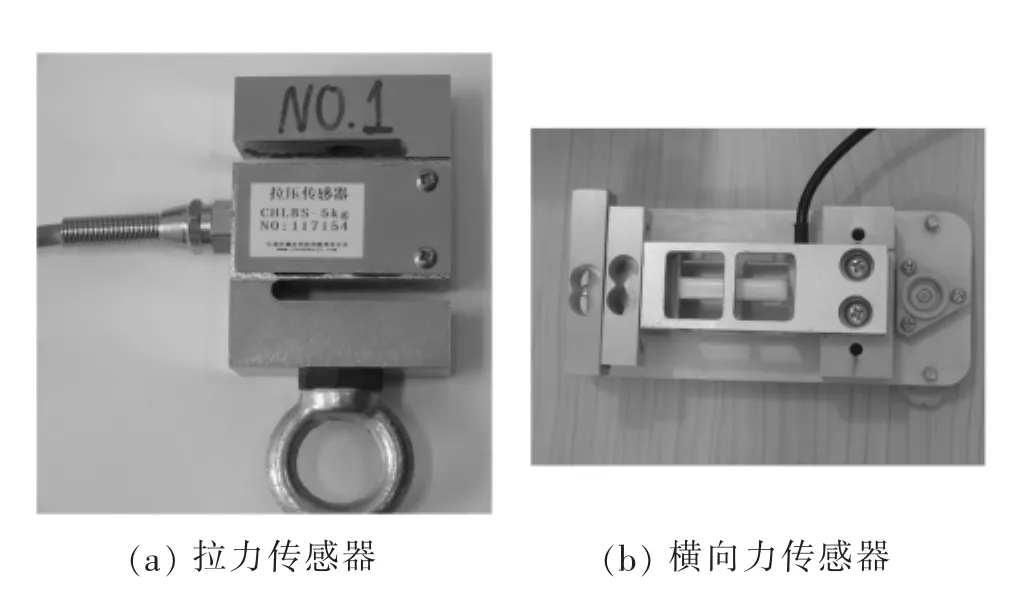
图1 力传感器
1.2 系统设计原理
整个系统设计主要包括船体、传感器、A/D转换器、通讯接口、工控机及软件,两船干扰试验中选择的两种传感器在信号传输过程中使用的均是RS-485接口,这主要是因为该接口传输过程中抗噪声干扰性好,最大传输距离可达3 000 m。但通常工控机上自带串口为RS-232接口,因此还需要通过转换器将RS-485接口所传输的数据转换后经过RS-232接口传入工控机。整个系统设计如图2所示。

图2 整体系统设计原理
图2中ADAM4117实现拉力传感器模拟信号到数字信号的转换,控制盒实现电压的放大和横向力传感器模拟信号至数字信号的转换。ADAM4117是16位A/D、8通道的模拟量输入模块,用来采集拉力传感器输出的电流信号,需要发送相关指令才能采集数据。横向力传感器只要接线正确、标定完成,即可实现数据采集,不需要发送指令。
2 多通道数据采集系统及分析系统开发
2.1 多通道数据采集系统
如上文所述,数据采集系统需要实现2个阻力通道及4个横向力通道共6个通道数据的采集。其中阻力采用拉力传感器,需要通过发送相关指令才能采集到数据,该指令在采集系统开发时已内化到程序内部;横向力采用横向力传感器,使用时不需要发送指令。本文在数据采集系统开发时,按照顺序结构,依次采集6个通道数据,最后将数据实时显示并保存到指定文件中。
开发的多通道数据采集系统主要包括以下几个模块:①串口参数设置模块;②发送指令显示模块;③接收数据显示模块;④标定系数设置模块;⑤采集数据实时曲线显示模块;⑥采集数据统计分析模块,主要包括最大值、最小值、平均值、总数据点数;⑦数据保存模块。系统运行过程界面截图如图3所示。串口参数设置模块及横向力数据采集程序代码、拉力传感器数据采集程序代码分别如图4、图5所示。
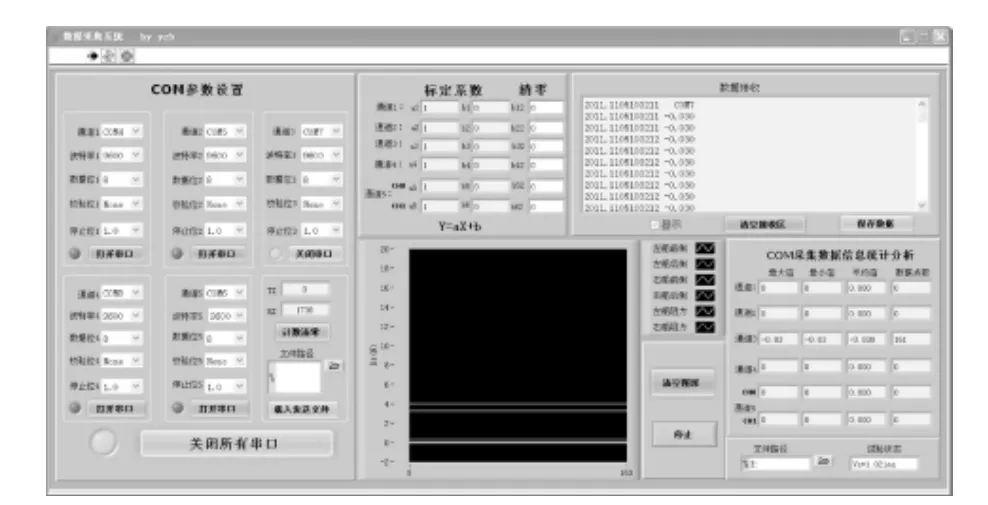
图3 多通道数据采集系统
2.2 多通道数据分析系统
为了实现采集数据的快速分析,开发了多通道数据分析系统,该系统主要包括以下几个模块:①打开文件模块;②数据分段处理模块;③数据信息统计模块,包括最大值、最小值、平均值。系统运行界面如图6所示。
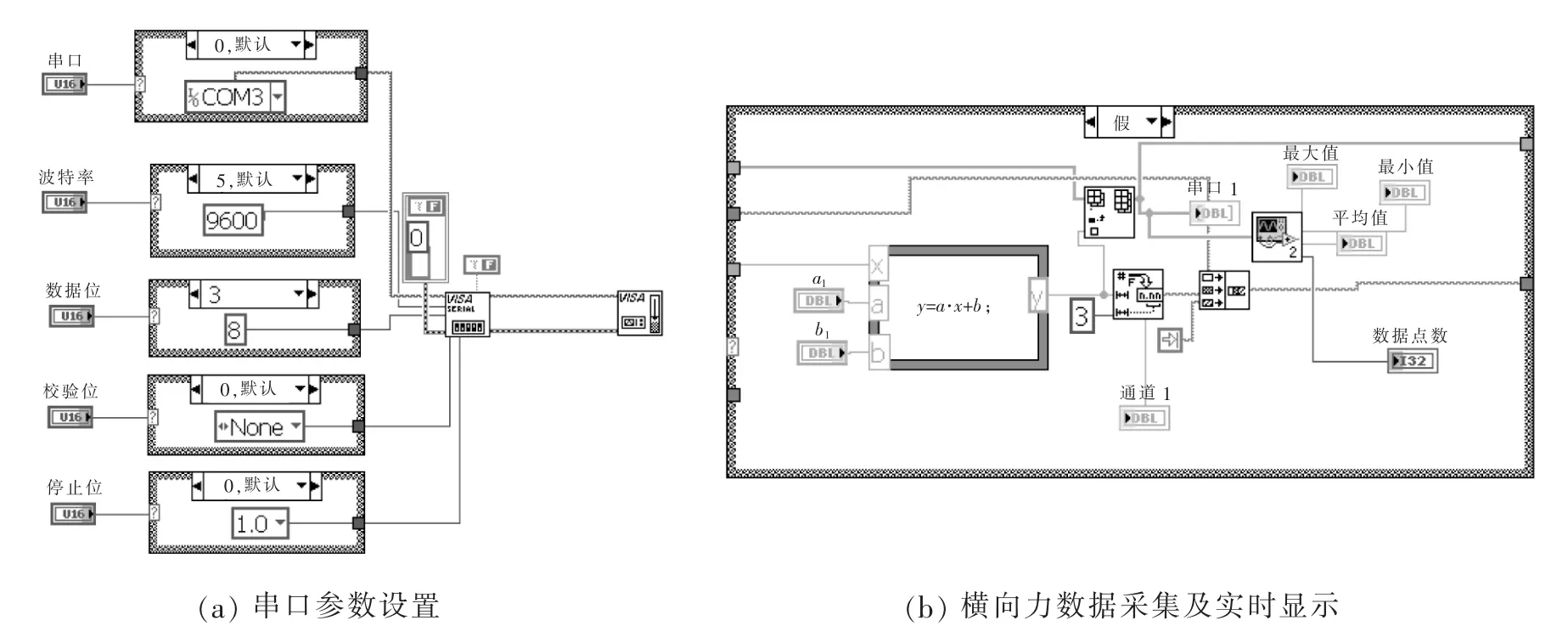
图4 串口参数设置及横向力数据采集程序后面板
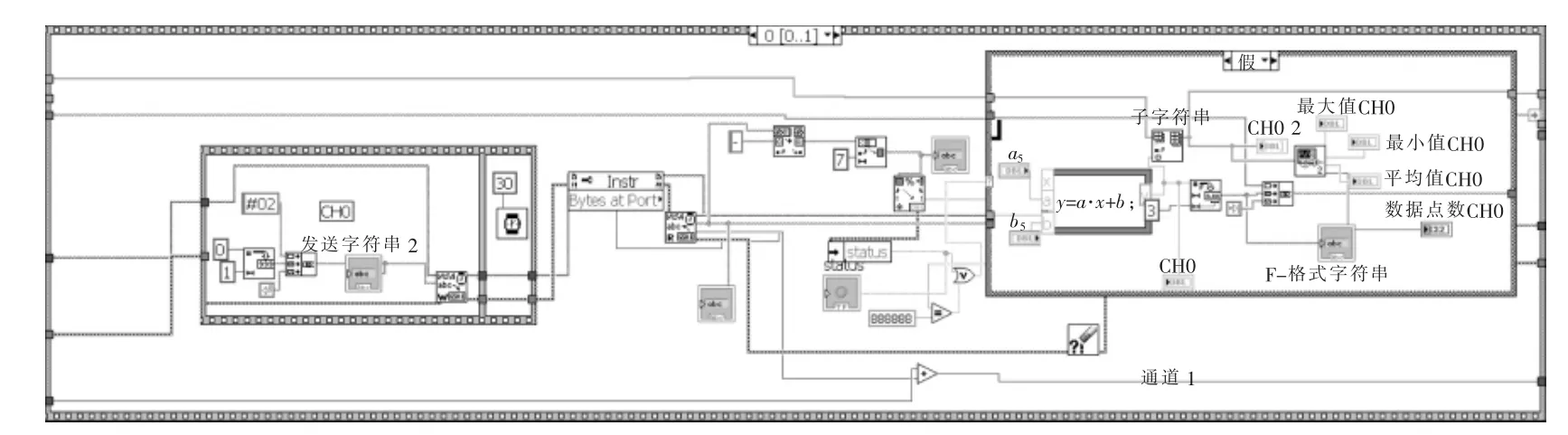
图5 拉力数据采集程序后面板
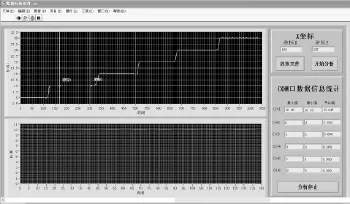
图6 多通道数据分析系统
3 力传感器系数的“迭代标定法”
采用上述开发的数据采集系统实现拉力传感器的标定。对拉力传感器的标定通常采用的方法有最小二乘法[8]、神经网络方法[9-10],无论采用哪种方法,归根结底是要建立传感器输出值与实际值的线性拟合关系,这是力传感器的工作原理。
以上介绍的传感器标定方法都是采用一次标定获得标定系数,在实际标定过程中,一次标定时数据的选取非常关键。如果选取的数据与真实值之间误差较大,则会得到一个不合理的标定系数,进而影响传感器的测量精度。为了消除这种人为因素造成的误差,这里给出“参数标定的迭代法”。该方法的基本思想是:①采集第一次数据,每个标定点采集多个样本,取均值;②对采集到的数据点进行线性拟合,得到回归系数,作为第一次标定系数;③采用第一次得到的标定系数采集样本点,并对这些样本点拟合,对第一次得到的回归系数进行修正,得到第二次标定系数。如此往复,直到所获得的样本点均值与真实值基本相同为止。采用该方法一般循环3~4次即可得到较满意的标定系数。
为了验证本文提出的“参数标定的迭代方法”,选取拉力传感器开展的试验验证。表1中给出了第一次采集到的8组样本数据。
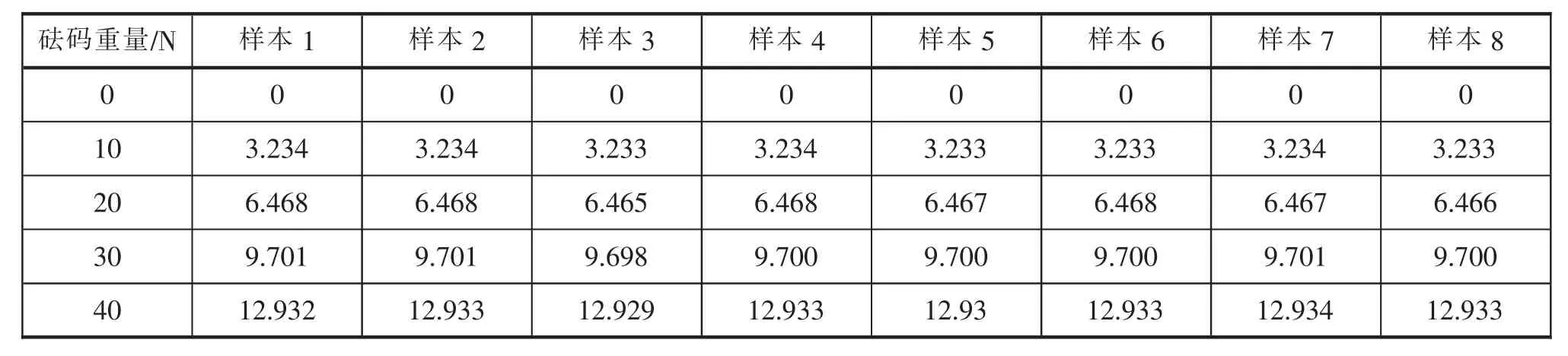
表1 第一次标定用数据
对表1中样本数据取均值,然后采用最小二乘法拟合得到第一次标定系数。
标定系数Rt=a1×Current+b1,a1=3.093,b1=-0.001。通过第一次迭代得到的回归系数对a1进行修正,得到系数a2=3.109 1;通过第二次迭代,又得到系数a3=3.110 3。通过表2中的数据可以看出,此时的回归系数已较令人满意。

表2 迭代法数据
4 结 论
本文基于Labview软件,根据两种传感器不同的工作方式,开发了基于串口通信的多通道数据采集系统、多通道数据分析系统,为多通道数据采集、分析提供了快捷方便的工具;同时提出力传感器的“迭代标定法”,并用力传感器标定的试验验证了该方法的有效性。
[1]SKEJIC R.Maneuvering and Seakeeping of a Single Ship and of Two Ships in Interaction[D].Trondheim:Norwegian University of Science and Technology,2008.
[2]XIANG X,FALTISEN O M.Maneuvering of Two Interacting ShipsinCalmWater[C]//Proceedingsofthe11thInternational Symposium on Practical Design of Ships and Other Floating Structures.Rio de Janeiro,Brazil:[s.n.],2010.
[3]XIANG X,FALTISEN O M.Time Domain Simulation of Two Interacting Ships Advancing Parallel in Waves[C]//Proceedings of the 30th International Conference on Ocean,Offshore and Arctic Engineering.Rotterdam,the Netherlands:[s.n.],2011.
[4]谢楠,江滨,李平,等.舰船在波浪中补给的运动性能研究[J]. 水动力 研 究与 进 展 (A 辑),1999,14(4):510-520.
[5]张丙才,刘琳,高广峰,等.基于Labview的数据采集与信号处理[J].仪表技术与传感器,2007,12:74-75.
[6]金仁江,肖志华.基于Labview的多通道温度测控系统设计[J].常州信息职业技术学院学报,2011,10(1):20-22.
[7]吴俊勇,闫振靖,魏跃平.基于LabView的多通道低温试验测试系统[J].自动化技术与应用,2011,30(2):73-77.
[8]石炳存,王源水.标定方法对称重传感器标定的影响[J].宁夏工程技术,2005,4(3):251-252.
[9]王丽,刘训涛.基于神经网络的压力传感器标定技术[J].煤炭技术,2006,25(7):1-2.
[10]张丹,于朝民,李东.基于BP神经网路的压力传感器静态特性数据融合[J].计算机测量与控制,2004,12(6):598-600.
