基于双馈式风力发电机的研究与转子故障仿真
2012-08-07李和明李永刚王成勇
李和明 李 爽 李永刚 王成勇
华北电力大学电气与电子工程学院 河北 保定 071003
0 引言
随着经济的快速发展, 能源消耗的逐年增加,常规能源资源面临日益枯竭的窘迫,迫切需要一些清洁、无污染、可再生的新能源。在目前众多可再生能源与新能源技术开发中,风力发电占有突出的地位,具有重要的开发利用价值,因而受到世界各国的普遍重视。在过去的10 年中,全世界的风力发电产业以年均28%的速度快速增长, 成为发展最快的可再生能源[1-2]。
目前的并网型风力发电技术主要有双馈异步、永磁直驱、普通异步等三种技术。在这三种技术中,变速恒频双馈异步风力发电机(DFIG)以其调速范围宽、有功和无功功率可独立调节以及所需励磁变频器容量较小等优点,迅速取代传统的恒速恒频笼型异步发电机组, 成为国际主流风电机组产品,占据市场90%份额。
双馈型异步发电机在结构上类似绕线式异步电机,具有定、转子两套绕组;在控制中,DFIG 转子一般由接到电网上的变换器进行交流励磁。通过转子励磁控制,不但可实现变速恒频运行,而且还能实现输出有功、无功功率的解耦。
本文通过对双馈机原理及控制的分析, 利用MATLAB 软件,搭建了双馈式风力发电机组接入电网的模型,为分析其正常及故障特性提供了一个软件平台。
1 双馈式风力发电机的工作原理
图1 为双馈风力发电机组简单构造。其定子接入电网,转子由频率、幅值、相位可调的电源供给三相低频电流[1、4]。 双馈电机在结构上类似绕线式异步电机,由于实际上发电机的定、转子都参与了励磁,“双馈”的含义因此而得。
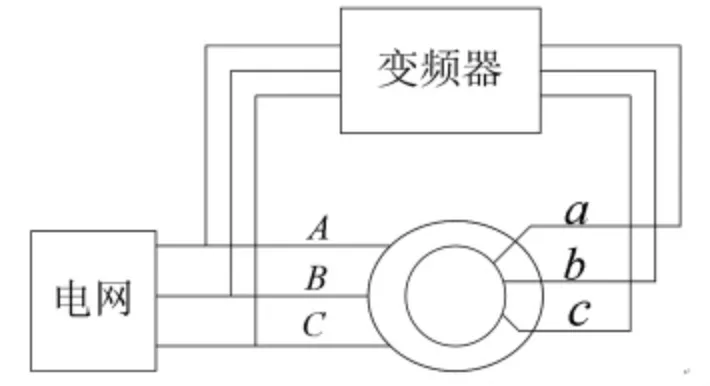
图1 风力发电机机组构造图
设双馈式风力发电机转子的旋转速度为nr,转子外加励磁电源产生的旋转磁场相对于转子的旋转速度为n2,定子同步磁场的旋转速度为n1,他们之间的关系为n1=n2+nr。
由于f1=n1p/60 及f2=n2p/60,则有:

可知, 双馈式风力发电机主要运行在三种状态:
(1)次同步运行状态。 在此种状态下发电机的转速小于定子磁场同步转速,f2大于0,频率为f2的电流产生的旋转磁场转速n2与转子的转速方向相同。
(2)超同步运行状态。 此种状态下发电机的转速大于定子磁场同步转速,f2小于0,旋转磁场转速n2的转向与转子的转向相反。
(3)同步运行状态。 此种状态下发电机的转速恰好等于定子磁场同步转速,f2等于0,转子进行直流励磁。这表明此时通入转子绕组的电流的频率为0,也即是直流电流,因此与普通同步发电机一样。
2 双馈式风力发电机的数学模型
下面来谈论同步旋转坐标系下双馈式风力发电机的数学模型[5-7]。 为了得到简化模型,做以下假定:
(1)设发电机定转子都为三相对称绕组,均匀分布在电机圆周内,气隙均匀,电路、磁路呈对称分布,忽略磁滞、涡流损耗和铁耗。
(2)只考虑定、转子电流的基波分量,忽略谐波分量。
(3)定转子绕组均采用电动机惯例,即定、转子绕组电流以流入为正。
对于分析三相静止坐标系的双馈式风力发电机模型,可以参照同步发电机的分析方法,采用坐标变换的思路进行分析。
坐标变换的思想是:将一个三相静止坐标系里的矢量,通过变换用一个两相静止坐标下或两相旋转坐标系里的矢量表示,在变换时刻采取功率不变或幅值不变的原则。 变换前后的坐标系如图2所示。
由图2 的变换,就把三相静止坐标系变换为两相(d,q)旋转坐标系。 根据上述假定写出双馈发电机在两相同步旋转坐标系下的数学模型:
磁链方程:
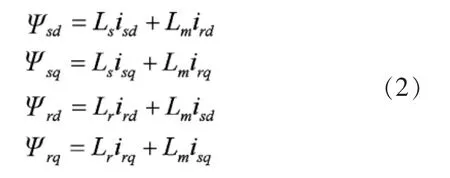

图2 变换前后的坐标系
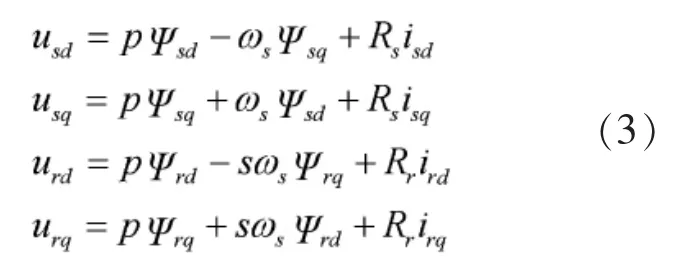
电压方程:
电磁转矩方程:

转子运动方程:

联立求解式方程即为双馈式风力发电机的全部状态。
3 双馈式风力发电机组的MATLAB仿真模型
前面讨论了双馈风力发电机的基本原理以及数学模型,而这些都只是研究双馈式风力发电机组并网运行特性的理论基础。 由于电力系统是一个实时系统,存在其安全性和稳定性,我们无法让每一台发电机接入实际电网然后观测其运行数据,所以对风电机组的仿真就变得非常重要,本节利用MATLAB 软件, 搭建了双馈式风力发电机组的模型。
双馈式风力发电机组的仿真主要应用了MATLAB 里Simpowersystems 中的元件模块来构成系统的模型,主要包括风力机模型、信号反馈系统模型、定子和转子侧变换器矢量控制模型、三相电源模型、双PWM 变频器模型以及双馈电机模型。
双馈风力发电机组由6 台单台额定功率为1.5MW 的发电机组成,工作频率为60Hz,额定线电压为575V,发电机的极对数为3,定子绕组的电阻为rs=0.23Ω,定子绕组的自感为Ls=1.8H,转子绕组的电阻为rr=0.16Ω,转子绕组的自感为Lr=1.6H,定转子的互感为Lm=2.9H, 电网线电压为120kV,额定风速为15m/s。
3.1 双馈式风力发电机组并网的仿真
对于仿真双馈式风力发电机的并网过程,在之前模型的基础上加设一个三相断路器,令断路器事先出于断开状态,当0.05s 开始仿真时令三相断路器闭合,就可以仿真双馈式风力发电机组的并网过程,如图3 所示。
当双馈风力发电机成功实现并网后,发电机的定子电压电流都处在一个稳定状态。 当风速恒定,系统稳定的情况下,双馈风力发电机的运行仿真情况如下图4:

图3 仿真并网过程中加装的三相断路器
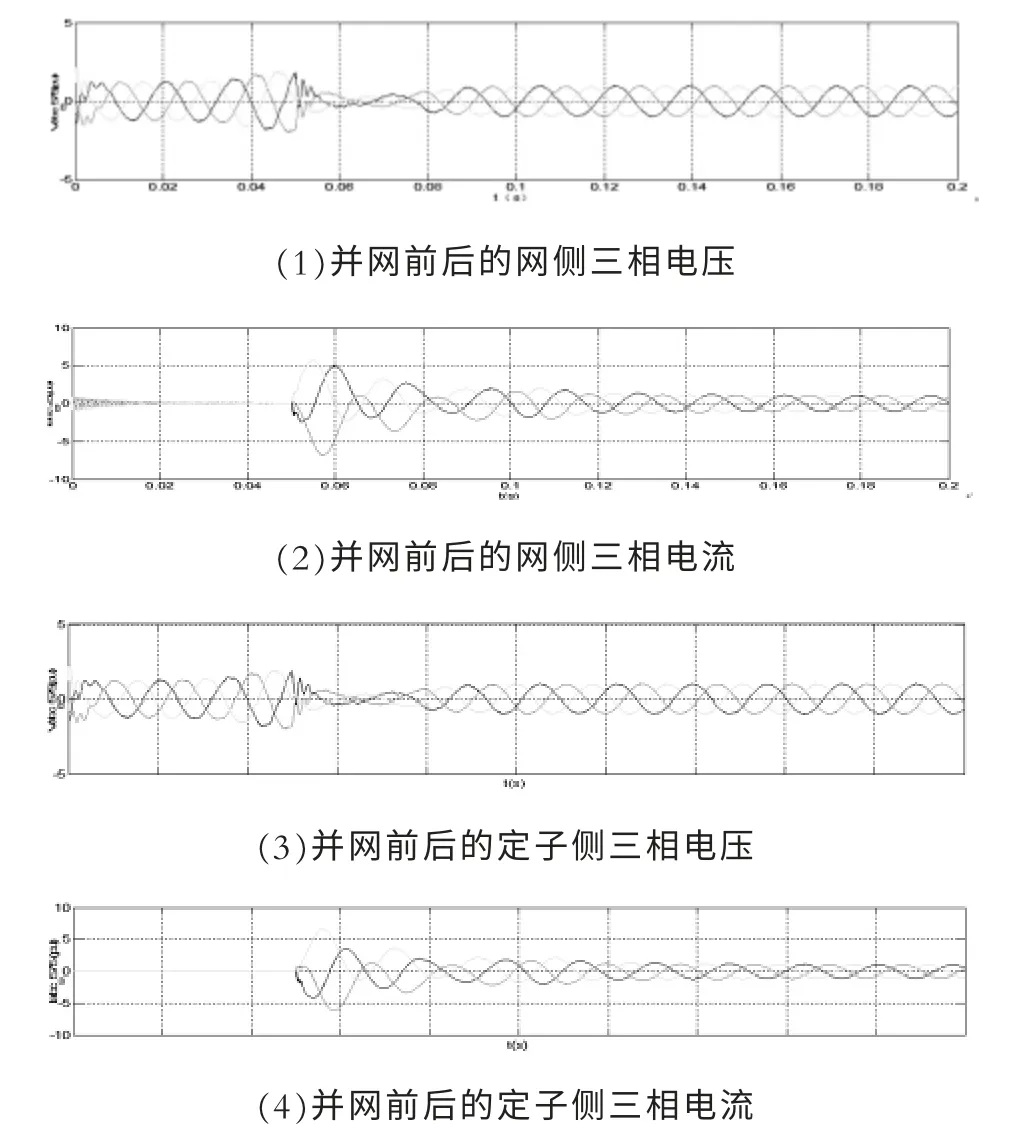
图4 并网前后机组仿真情况
当t=0.05s 双馈式风力发电机并网, 定子三相电流从零有一个突变,在极短的一段时间里,产生了冲击电流。这是因为并网前定子输出电压与电网电压存在着相位误差和幅值误差。 可知,双馈风力发电机发电分为三个阶段: 并网前的空载运行状态,并网时的过渡过程和并网后的最大风能捕捉的发电运行过程。 由波形图中可以明显地看出双馈发电机成功实现并网后的电压和电流过渡过程。在并网之前, 空载发电机模型的矢量控制系统被激活;成功实现并网后,将状态切换到发电运行状态下,进行最大风能追踪控制[8],完成整个并网切换过程。
3.2 双馈式风力发电机转子不同相匝间短路故障的仿真
设置故障如下: 当t=0.05s 时, 发电机转子侧AB 相发生匝间短路,当t=0.15s 时,发电机匝间短路故障消失。在双馈式风力发电系统发电机模型内置模型中加装故障元件,得到下图5 所示波形:

图5 转子匝间短路故障后波形
分析波形知,当t=0.05s 时,发电机转子侧AB相发生匝间短路,持续0.1s,这对发电机定子侧电压影响不大,但对定子电流影响很大,定子电流出现大幅度波动,三相定子电流幅值忽大忽小;有功功率一直下降至跌落为负值,这也就是说当发电机转子侧发生不同相间匝间短路后,发电机会被迫一段时间向电网吸收有功功率;而发电机无功功率也出现摇摆,但更多是向电网吸收无功功率,而且故障后发电机向电网侧的吸收有功无功状况大致是称成正比的。 故障后发电机输出有功降低,无功出现波动;故障消失后,定子电压电流,发电机有功功率都回到正常运行状态,无功功率升高后缓慢下降至正常运行状态。 由此可见,发电机转子侧不同相间发生匝间短路故障会严重影响双馈式风力发电机的运行,但故障消失后,发电机有很强的自我调节能力,能够恢复到故障前的正常运行状态。
4 结论
本文对双馈式风力发电系统及其相关技术进行了分析,建立了包括风力机模型、信号反馈系统模型、矢量控制模型、双PWM 变频器模型以及双馈发电机模型的变速恒频双馈风力发电系统仿真模型,在此基础上进行了并网状态下正常运行状态以及在并网情况下发电机发生转子不同相匝间短路故障的仿真,通过对波形的分析,验证了所建模型的正确性。
[1]霍志红,郑源,左潞,张德虎.风力发电机组控制技术[M].北京:中国水利水电出版社,2010.
[2]李梅,李建林,赵斌,许洪华.不同电网故障情况下DFIG运行特性比较[J].高电压技术,2008,34(4):88-93.
[3]贺益康,周鹏.变速恒频双馈异步风力发电系统低电压穿越技术综述[J].电工技术学报,2009,24(9):140-146.
[4]高亚州,史萌生,白慧珍.双馈异步发电机的工作原理及电磁设计[J].理论与设计,2009,(6):1-8.
[5]高景德,王祥珩,李发海.交流电机及其系统的分析[M].北京:清华大学出版社,2005.
[6]王晶,翁国庆,张有兵.电力系统的MATLAB/SIMULINK 仿真与应用[M].西安:西安电子科技大学出版社,2011.
[7]郭晓明,贺益康,何奔腾,胡家兵.不对称电网电压下双馈风力发电机的直接功率控制[J].电力系统自动化,2008,32(13):86-91.
[8]吴政球,干磊,曾议,冷贵峰,罗建中.风力发电最大风能追踪综述[J].电力系统及其自动化学报,2009,21(4):88-93.
