大同市地理空间基础框架建设
2012-08-06罗宏
罗宏
(大同市勘察测绘院,山西 大同 037006)
1 引言
大同市测量平面控制网是上世纪50年代建立的,1964年进行了改造,该网的具体情况已不详,覆盖范围大约400 km2,其精度与覆盖范围远不能满足城市发展的需要,此外高程基准也存在不统一的问题。为了满足大同市经济建设的需要,需建立大同市高精度、三维(GPS)空间控制网、高程控制网,为全市提供高精度、统一、标准的地理空间基础框架。
项目主要目标:利用GPS定位技术、水准测量技术建立与国家统一的三维地心参考框架相一致的大同市高精度地心参考框架,构成大同新一代“国家空间数据基础设施(NDI)”的框架设施,以三维、高精度、多功能的定位成果,为城市规划、灾害监测、交通、绿化等各项经济建设提供广泛的测绘服务,为“数字大同”的建设提供基础保障。获取大同市参心基准与地心基准的转换关系,为城市坐标系统向地心基准转变做好技术准备。
地理空间基础框架是地理信息数据的基础参考框架,它为经济建设和社会信息化提供统一的空间定位基准,对于城市信息资源按照地理空间进行整合和实现信息共享具有十分重要的作用。
2 布网观测
在建立高精度GPS控制网的同时,应根据测区范围,选取一定数量的GPS框架网点,其目的在于获得高精度的地心坐标,提高GPS网的整体精度。框架网不仅可以为全面网提供一个控制基准,还可以将C级网与国家高等级GPS网联结起来,此外,还可获得高精度的ITRF坐标。
为了获取1954年北京坐标系、1980西安坐标系、大同地方坐标系成果间转换参数,需联测部分分布较均匀的具有以上3种坐标系坐标成果的控制点。
在测区范围内布设4个框架点,平均点间距20 km~40 km,布设31个C级点,平均点间距5 km~10 km。利用天宝高精度双频接收机,对每个框架点进行了连续至少48 h的外业观测。对每个C级点各观测两个时段,每个时段4 h~6 h。经TEQC检测,观测质量满足设计要求。

图1 GPS点位布设示意图
3 基线处理
基线处理分两步进行,首先是框架网的基线处理,其次是C级网的基线处理。
3.1 基线处理软件
基线处理软件采用美国麻省理工学院和Scripps研究所共同研制的GAMIT(Ver 10.31)软件。该软件是采用双差观测值解算,可以解算地面站的三维坐标和定轨,在利用精密星历的情况下,解基线的相对精度能够达到10-9左右,是目前最优秀的GPS解算软件之一。
3.2 星历
卫星轨道的精度也是影响GPS基线解算精度的重要因素之一,其对基线的影响可以较为精确地用下式给出:

式中|Δr|为卫星轨道的误差,r为卫星至测站的位置矢量,|Δb|为基线矢量的误差,b为两站之间基线矢量。
大同市GPS控制网的处理,采用星历采用IGS事后精密星历,其轨道精度优于0.05 m。如控制网中的边长为100 km,根据上式计算可得星历对基线解算在最不利的情况下影响也不超过0.1 mm。
3.3 坐标框架与历元
在GPS精密相对定位数据处理中,定位的基准是由卫星星历和基准站坐标共同给出的。为了确定在严格基准下的控制网地心坐标,必须将控制网纳入到ITRF参考框架中。因此有必要在处理时加上在ITRF参考框架中测站坐标已知的全球站数据一起处理。另外,由于精密星历提供的卫星坐标是瞬时的,相应地面基准站坐标也应是瞬时的。
3.4 起算坐标
对于框架网,引入的全球跟踪站为:WUHN、BJFS、KUNM、SHAO、URUM、SUWN、USUD、TNML、KIT3、POL2共10点,并将这些国际永久跟踪站作为GPS控制网的地心基准。
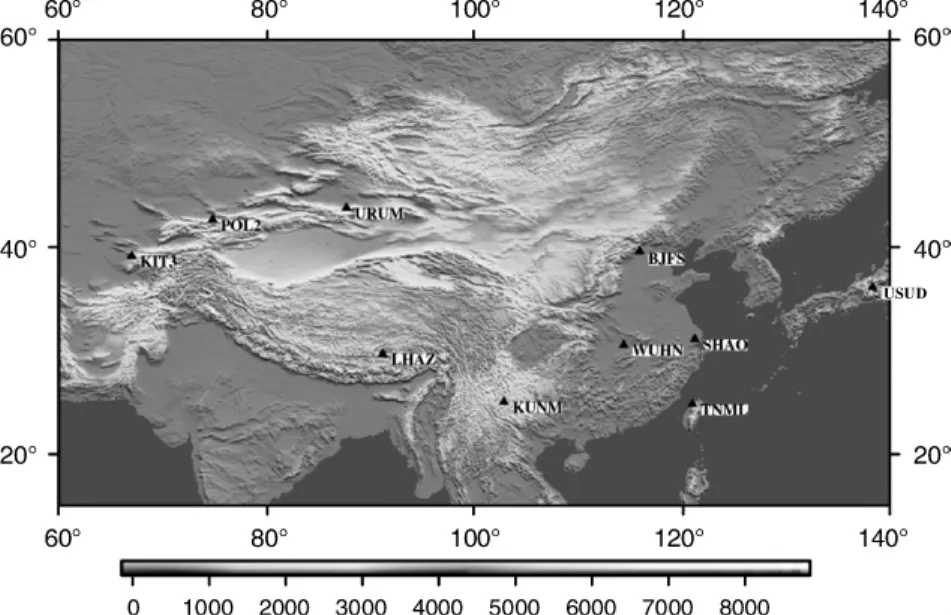
图2 所选择的IGS站点位分布示意图
基线解算中,起算点(基准站)的精度将影响基线的精度。起算点对基线解算的最大影响可以用下式表示:δS=0.60 ×10-4×D × δX1
式中δS为对基线的影响,D为基线的长度,δX1为起算坐标的误差。令起算坐标的误差为20 cm,如基线的长度为100 km,则起算坐标对其影响为1.2 mm。由此可知,单点定位所得坐标的精度很差,大约在20 m~40 m左右,不能作为起算点。由此可见,很有必要引进高精度的GPS基准点。
C级网起算点为大同市框架网点。
3.5 基线解算的主要模型和参数
每个时段求解时,主要考虑如下因素:
(1)卫星钟差的模型改正(用广播星历中的钟差参数);
(2)接收机钟差的模型改正(用根据伪距观测值计算出的钟差);
(3)电离层折射影响用LC观测值消除;
(4)对流层折射根据标准大气模型用萨斯坦莫宁(Saastamoinen)模型改正,采用分段线形的方法估算折射量偏差参数;
(5)卫星和接收机天线相位中心改正,接收机天线L1、L2相位中心偏差采用GAMIT软件的设定值;
(6)测站位置的潮汐改正;
(7)截止高度角为15°,历元间隔为30 s;
(8)考虑卫星轨道误差,即松弛IGS轨道。
3.6 基线数据处理流程
观测数据质量是保证基线解算精度和可靠性的关键之一。因此,用GAMIT软件处理时,正确修正观测数据中的周跳和删除大残差观测值的数据编辑是GPS数据处理中的主要工作之一。数据编辑采用AUTCLN模块自动进行。对于质量较差的站则采用CVIEW进行人工数据编辑。数据编辑工作完成后,生成干净的观测数据文件(X-文件),用于每时段基线解算。
在完成以上工作的基础上,从干净的X-文件开始,生成观测方程和解算基线,得出每个时段的解。
3.7 GPS 基线检核
(1)重复基线
各时段向量的重复性反映了基线解的内部精度,是衡量基线解质量的一个重要指标。其定义为:
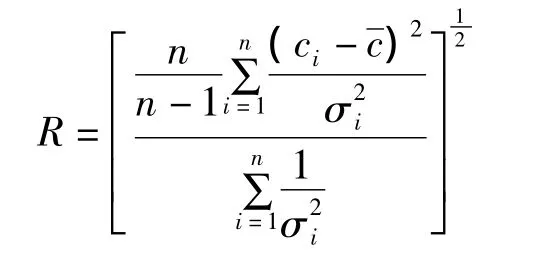
式中:ci是各时段解基线的各分量是相应分量的协方差为相应基线分量的加权平均值,R为相应的重复性。
重复精度也可用固定误差和比例误差两部分表示,即:σ =a+b×l
式中:σ为分量的中误差,a为分量的固定误差,b为相对误差,l为分量的长度。
(2)同步环闭合差
由于GAMIT软件采用的是网解(即全组合解),其同步环闭合差在基线解算时已经进行了分配。对于GAMIT软件基线解的同步环检核,可以把解的nrms值作为同步环质量好坏的一个指标,一般要求nrms值小于0.5。采用GAMIT软件解算基线时,同步环闭合差已经分配,可不再作同步环检验。
(3)异步环闭合差
复测基线长度较差:
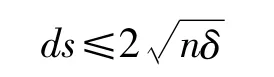
异步环的坐标分量相对闭合差精度应满足:

其中:n为独立环的边数

4 网平差
为了获得CGCS2000基准下的各个控制点坐标,将上述获得的基线一起进行整体平差。框架网平差时,通过对各网引入尺度和坐标的旋转因子以吸收地壳运动和各网基准不统一的影响。
4.1 网平差软件
网平差软件:采用美国麻省理工学院(MIT)和Scripps海洋研究所(SIO)共同研制的GLOBK。
4.2 ITRF坐标框架下三维平差基准选取
ITRF坐标框架下三维平差的基准站为:WUHN(武汉)、SHAO(上海)、BJFS(北京房山)和 URUM(乌鲁木齐),坐标为国家GPS 2000网的坐标,其坐标框架为 ITRF97,历元为 2000.0。
4.3 ITRF坐标框架下三维无约束平差
GPS网采用GAMIT软件进行同步观测网的基线解算,平差时采用各同步观测网的独立基线向量及其全协方差矩阵作为观测量。整个三维无约束平差应分两步进行:首先框架网的无约束平差,其次C级网的无约束平差。
三维无约束平差的目的主要有以下三个方面:一是进行粗差分析,以发现观测量中的粗差并消除其影响;二是调整观测量的协方差分量因子,使其与实际精度相匹配;三是对整体网的内部精度进行检验和评估。
4.4 ITRF坐标框架下三维约束平差
约束整体平差的目的是将框架网和C级网作为整体平差。将框架网和C级网的所有独立基线向量及其经调整后的协方差阵作为观测量,平差时考虑框架网与C级网采用的星历不同,约束差时为了消除星历和网的传递误差引起的整网在尺度和方向上的系统性偏差,应对全面网加入一个尺度和三个转换参数,并检验其显著性,舍弃不显著的参数后再作约束平差。
4.5 地心坐标系的建立
利用IGS跟踪站同步数据,计算出控制点地心坐标系坐标(ITRF97框架、历元2000.0)。
4.6 平面直角坐标系下的坐标计算
由于原大同市独立坐标的建立情况已不清楚,按照城市独立坐标系建立的基本要求,为了控制边长的变形,首先将WGS-84地心坐标按照测区中央子午线,测区平均高程面作为高程的投影面,进行高斯投影,然后按照多个独立坐标的已知点与WGS-84高斯平面坐标作相似变换,通过计算最终选择兼容性较好的三点为已知点进行坐标转换得到全网大同独立坐标。
5 坐标转换
整个数据处理过程所涉及的坐标系统(基准)包括有:ITRF、1954年北京坐标系、1980西安坐标系、大同地方坐标系。坐标转换的主要工作是建立大同市各坐标系统之间的转换关系,求解不同坐标系之间的转换参数,并对计算两坐标系转换参数精度评估。
5.1 二维坐标转换
由于各种参心坐标系(1954年北京坐标系、1980西安坐标系)与独立坐标系平面和高程是相互独立的,WGS-84坐标是地心空间的坐标系,因此我们可以对各种参心坐标、独立坐标与投影到平面上的WGS-84坐标进行转换。
平面坐标系统之间的相互转换包含四个转换因子,即两个平移因子、一个旋转因子和一个尺度因子。
四参数转换模型:

5.2 三维坐标转换
众所周知,建立两坐标系平面转换关系可以得到目标点(转换点)的平面坐标,建立两坐标系空间三维转换关系,可以得到转换点平面坐标与高程,可以解决一些低等级的测量实际问题。
为了便于今后的使用和控制网的拓展,WGS-84坐标系到1954年北京坐标系、1980西安坐标系、大同独立坐标系也应提供空间三维坐标转换七参数模型和转换参数。包含7个转换因子,即3个平移因子、3个旋转因子和1个尺度因子。
七参数转换模型:

实验表明,由于控制点大地水准面差距(高程异常)未知,正常高观测精度的限制等原因,在较大范围内进行三维坐标转换其精度较差,在较小的范围内通过分区分块计算,其计算精度基本满足要求。
5.3 高程拟合
将同时具有大地高和正常高的多点参与计算,拟合数据中平面坐标取独立坐标,大地高H取地心坐标成果中的大地高,h是正常高(水准与三角高程观测)。高程拟合可以解决一些低等级高程测量的实际问题,在实际应用中要加以验证。
二次曲面拟合模型:

5.4 坐标转换软件的开发
为了方便今后使用及参数的保密,专门开发了坐标转换软件,实现了大同地方坐标系、WGS-84、1954年北京坐标系、1980西安坐标系之间的互转。
由于大同市勘察测绘院数据生产使用清华山维的EPS 2008软件,其支持VB脚本二次开发,故针对图形的转换开发了EPS脚本,方便图形转换。

图3 坐标转换软件截图
6 结语
随着社会的发展和人民生活水平的提高,社会各部门及公众对地理信息的服务需求也逐渐增加,地理空间基础框架的建设势在必行。
本文以大同市地理空间基础框架建设为例,介绍了地理空间基础框架建设的步骤、方法和经验,重点对GPS数据处理和坐标转换进行研究和探讨,具有一定的现实意义。
[1]陈军,邬伦.数字中国地理空间基础框架[M].北京:科学出版社,2003
[2]王华,陈晓茜,祁信舒.关于数字城市建设模式的探讨[J].地理信息空间,2011(2)
[3]李维森.浅析数字城市地理空间框架建设中的创新[J].测绘通报,2011(9)
[4]袁延良,任波,陈汭新等.“数字城市”地理空间数据框架建设研究[J].计算机技术发展,2007,17(2)
[5]李景文,赵福君,董星星等.数字城市地理空间框架模式设计[J].桂林工学院学报,2008,28(2)
[6]杨伯钢,冯学兵.城市地理空间框架建设技术体系研究[J],测绘科学,2007,32(1)
