数字轨道地图线路分段表示方法研究
2012-08-06杨剑锋
夏 青,杨剑锋
(兰州交通大学 自动化与电气工程学院,兰州730070)
在基于全球导航卫星系统 (Global Navigation Satellites System, GNSS)的列车运行控制系统中,数字轨道地图不但可以校正GNSS定位误差,还可作为线路信息数据库,将列车控制集中到车载环境中,降低成本[1]。轨道地图精度越高,列车定位精度也就越高,对列车的控制也就越精确。因此,生成一份高精度的数字轨道地图是非常必要的。
大量弯曲轨道在数字轨道地图中的表示是一个难点,既要保证精度,又要考虑存储效率,不能造成数据存储量过大而影响系统的实时性。目前常用的曲线表示方法如NURBS表示会造成数据存储量过大以及地图匹配算法的复杂。折线表示法是用折线表示曲线的方法,根据精度要求确定分段数,这种方法没有将线路按照其特点进行划分,势必会增加不必要的分段,影响了数据存储效率。
铁路线路都是由直线、圆曲线、缓和曲线组成。轨道曲线的绘制,就是采集线路上若干离散点的坐标,拟合出描述轨道线形的参数,在数字轨道地图中表示出来。为了准确描述线形,需要将轨道划分为以上3种线元,再根据各个线元的特点分别拟合。该方法的关键在于准确的判断测量点位于哪一种线元上。为此,本文提出根据角度差法对线路进行划分,并给出最小二乘直线、圆曲线拟合以及缓和曲线拟合算法。
1 测量点的筛选
1.1 线路坐标系的建立与角度计算
首先建立线路直角坐标系,将测得数据转换为该坐标系下的测点坐标,测量时存在大量多余观测,因此需要从获得的测点坐标中按照一定的间隔(10或20m)提取坐标值,使得相邻2点构成的弧长相等(直线可看作半径无穷大的曲线),将提取的测量点在坐标系中标出。如图1,输入12个测量点坐标值。
设点i的坐标为(xi, yi),则计算出点i与点i+1所形成的线段与Y轴的夹角θi为

图1中我们由上述方法分别计算出θ1到θ11的值。

图1 计算θi值示意图
1.2 线元上测量点的总体筛选
根据解析几何原理,若测点位于直线上,则点i与点i+1所形成的线段与Y轴的夹角θi值不变;若测点位于圆曲线上,则θi值的变化值△θi为一定值。根据这一性质可实现对测量点的筛选,基本思想是:
(1)计算相邻2个夹角θi与θi+1的差的绝对值△θi=|θi+1-θi|,该值为θi的变化值,如在图1中我们可以得到△θ1到△θ10;
(2) 比较相邻2个θi的变化值,看它们的差的绝对值是否小于一个给定的正常数ε(这个正常数由测量和计算误差以及轨道地图精度要求所决定),即判断△θi与ε的大小,若△θi<ε,则认为点i、点i+1、点i+2在一条直线上,以此类推,当△θi<ε(j>i)时,该直线段上的测点筛选结束。由此,筛选出所有直线段上的测点;
(3)当△θj<ε时,令ai=|△θi+1-△θi,比较ai与ε值的大小,当ai<ε时,则认为点i、点i+1、点i+2在一条圆曲线上,以此类推,当aj>ε()ji>时,该条圆曲线上的测点筛选结束。由此,筛选出所有圆曲线段上的测点;
(4)若不满足上述条件,可认为测点位于缓和曲线段上。
在实际运用时,通过设置给定正常数ε值的大小,可以减小误差并达到更加理想的轨道分段。一般计算出的圆曲线段θi的变化值△θi越大,设定的正常数ε的值相对较大可以取得更好的分段效果。
2 线元的拟合
由θi角度的变化规律,筛选出直线、缓和曲线、圆曲线的测量点,分别选取3种线元上的测点进行参数拟合计算。
2.1 最小二乘法直线拟合
设直线方程的形式为y=ax+b,获得直线线元上的坐标(x1, y1),(x2, y2),…(xk, yk),则由最小二乘原理,则可以求得a、b的值分别为:
根据上式对各点坐标值进行一次计算就可求出a,b,即可得到目标直线方程。
2.2 最小二乘法圆拟合
采样圆曲线上的测点坐标(x1, y1),(x2, y2),…(xk, yk),设R0为圆曲线半径,(X0, Y0)为圆心坐标。运用最小二乘法进行圆曲线拟合,各测点残差平方和函数为:

根据最小二乘法原理有:

由式(3)和(4)化简整理可得拟合出的圆曲线的半径和圆心坐标为:

由式(5)可以看出,由最小二乘法圆拟合的形式虽然复杂,但只需要对各点坐标计算一次即可得出圆曲线半径和圆心坐标,因此该算法的拟合速度是很快的。
2.3 缓和曲线的长度计算
常用的缓和曲线方程属于三次抛物线型,其表达式为:

其中:(x, y)为缓和曲线上任意一点坐标,R为圆曲线半径,l0为缓和曲线的长度。该方程的坐标原点是直缓点。
对缓和曲线采用三次多项式拟合,足以保证轨道地图的精度要求。采样缓和曲线上的测点坐标(x1, y1),(x2, y2),…(xk, yk),拟合方程为:

只需要4个数据点的值就可确定式(7)中的a、b、c、d参数的值。
按照上述方法分别估计出铁路线路中的直线、圆曲线、缓和曲线3种线形的参数,就可以将参数存储为数字地图的形式。
3 实例计算
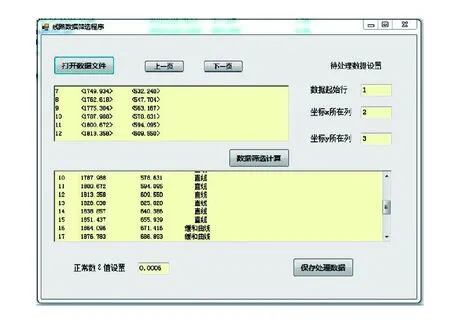
图2 线路数据筛选计算程序
按照上述算法,利用Visual C# 2005编制线路测点数据筛选计算程序,如图2。选取某一包含直线、缓和曲线、圆曲线的典型路段作算例,测量点数据按20 m等间隔提取,选取测量点数42个,程序在读取测量点的坐标数据后,能够判断出测量点所在的线元,从而大致判断出所选线路段中各线元上的测点,这里我们将ε设定为0.000 5。根据判断的结果在MATLAB下编制相应的拟合程序对3种线元进行拟合。所得的线路参数为:圆曲线半径为802.033 m;缓和曲线长度分别为110.23 m,105.06 m。对同一组数据进行多次分段拟合,并对拟合的结果进行误差校验,结果表明,拟合出的线路参数不存在较大的偶然误差和系统误差,拟合精度符合要求。图3为对不同线元拟合得到的线形。

图3 不同线元分别拟合的结果
4 结束语
本文针对铁路线路的特点,提出铁路线路分段拟合算法,根据2点确定的直线角度变化对线路进行分段,再用最小二乘原理对3种线元分别进行拟合。线路分段算法计算速度快,效率高,人工参与量少,能够准确的判断观测点数据所在的线元类型,进而准确地拟合出各个线元。相比于未作线路分段的拟合方法,可得到更加精确的线路参数,使轨道地图数据存储效率和精度得到一定的提高。应用最小二乘原理处理测量点坐标,计算过程的实质是最小二乘约束的整体优化过程,可准确恢复线路的各项参数。
[1] 张雅静,王剑,蔡伯根. 基于GNSS的虚拟应答器研究[J] . 铁道学报,2008,30(1):104-108.
