汽车电动助力转向系统的研究与设计
2012-08-01罗苏安向宝瑜吴友宇
罗苏安,向宝瑜,陈 宇,尤 虎,杨 剑,吴友宇
(武汉理工大学信息工程学院,湖北 武汉 430070)
随着汽车技术的发展,人们对汽车方向盘转向操纵性能的要求越来越高,既要有适度的转向轻便性,又要满足操纵稳定性[1]。笔者基于高性能单片机MC9S12P64设计了电动助力转向系统(EPS),经台架试验和整车试验证明,该系统满足对EPS的各项性能要求,能较好地解决转向“轻”与“灵”的矛盾,实现在各种行驶工况下提供最佳助力转向的功能。
1 EPS系统结构及工作原理
EPS在原机械转向系统的基础上,增加了车速传感器、扭矩传感器、电子控制单元(ECU)、电动机、离合器,以及减速机构等转向的助力机构,系统结构如图1所示[2]。

图1 电动助力转向系统结构示意图
其工作原理为:当驾驶员转动方向盘时,扭矩传感器就开始不间断地检测输入端,并把扭矩信号传输给控制中心ECU,ECU在接收到信号后,经过一定的分析和处理,按程序指令的方式对电动机、离合器进行控制,通过改变电动机工作电流的大小或方向,实现对助力电机的实时精确控制,从而实现助力转向的目的。
2 EPS控制器的设计
2.1 主控单元设计
该系统主要由8个功能单元组成[3]。电动助力系统硬件方框图如图2所示。
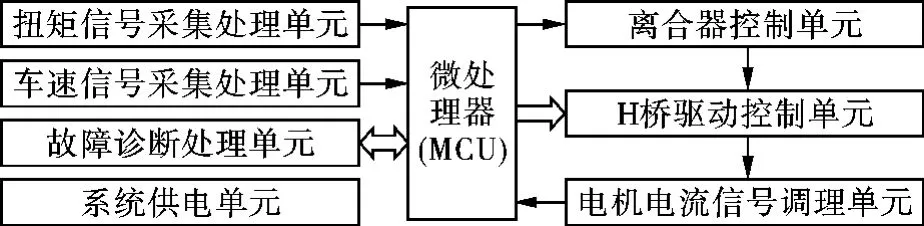
图2 电动助力系统硬件方框图
系统主控芯片选用的Freescale 16位S12系列单片机MC9S12P64为低成本、高性能、低引脚数的汽车专业级单片机产品,在汽车电子产品中被广泛采用,性能符合系统设计需求[4]。它负责各种传感器信号的采集和调理,并发送命令控制H桥为电机输出合适的助力电流。
系统整体的尺寸要求较小,利于安装在汽车驾驶室内部,但这造成控制电路部分排布较密集,容易引起相邻电路间干扰,同时由于系统工作在汽车环境中,因此在设计电路时一定要注意抗干扰设计,否则会造成系统本身工作异常[5]。
2.2 数据采集与处理单元设计
扭矩信号采集与处理单元用来测量驾驶员施加在方向盘上的力矩大小和方向,并以电压量输送至MCU[6]。车速信号由电磁型转速传感器产生,发动机转速信号来自点火系统的电压脉冲信号,火花塞每跳一次便发出一个电压脉冲,火花塞点火频率与发动机转速成正比[7]。为简化装置,试验台中用信号发生器的信号代替车速传感器产生的周期信号和发动机的转速信号。
2.3 驱动单元设计
驱动单元包括4个MOSFET组成的H桥电路及前置驱动保护电路,驱动芯片选用IR公司的IR2130。MCU通过H桥以PWM方式控制直流电机,调节H桥输入的PWM脉宽,即可调节电机的输入电压,从而改变电机电流和助力的大小。当电机电流达到助力值时,H桥根据MCU的指令输出适宜的PWM波控制助力电机输出合适的辅助扭矩[8]。
3 EPS软件设计
3.1 控制策略设计
助力控制算法的数学模型为一组车速下转矩与对应电机电流的曲线。直线型电动助力曲线如图 3 所示[9]。

图3 直线型电动助力曲线
助力特性分为4个区域:小角度无助力区、助力随转向力矩线性变化区、恒助力区和大转角停止助力保护区[10]。MCU根据车速及方向盘转矩计算得到目标助力转矩,再通过PID负反馈调节算法来追踪输出电流大小,驱动电机输出合适的助力。
3.2 系统程序设计
该系统的程序流程图如图4所示。
4 试验调试
4.1 台架试验调试

图4 EPS系统程序流程图
该系统利用EPS综合性能试验台进行台架试验。台架试验的测试项目有:①测试系统各个输入信号、检测精度是否达到设计要求;②模拟系统的实际工作状态,包括电机负载与实际车况,测试系统助力效果;③根据实验结果,优化控制算法及电路设计,确定最优参数[11-12]。
系统运行时,EPS综合试验台采集并实时显示各种工作特性曲线,其界面图如图5所示。
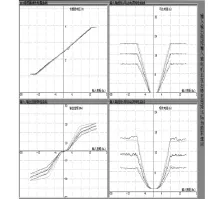
图5 EPS工作特性曲线界面图
通过多次试验数据,分析系统性能,不断优化软硬件设计,使EPS系统达到最佳性能。
4.2 整车试验调试
完成台架试验后,进行整车试验,图6为EPS整车试验实物图。
经过前后4代系统的改进,包括对硬件电路的反复优化以及对制版、软件的反复修改调试,整车试验结果得到明显改善,助力效果明显,达到预期设计要求。
5 结论
为改善汽车的性能,提高驾驶员驾驶的舒适性和安全性,减少环境污染,满足对汽车节能性和环保性的要求,笔者探讨了EPS的软硬件设计,并进行台架试验和整车试验。结果表明,自主开发的EPS系统助力效果明显,操作手感好,能够显著改善汽车的转向性能,并且性能稳定,满足转向性能指标。

图6 EPS整车试验实物图
[1] 林逸.汽车电动助力转向技术的发展现状与趋势[J].公路交通科技,2001,18(3):18 -21.
[2] 龚小平,杜志强.电动助力转向技术发展的新动向[J].汽车研究与开发,2005,7(1):1 -4.
[3] 毛务本,马谦.电动助力转向系统硬件设计及试验研究[J].微计算机信息,2005,8(1):21-23.
[4] Motorola Inc.1N5817/D data sheet[R].Denver:Motorola Literature Distribution,1996.
[5] 张亚宁.摩托罗拉单片机MC9S12DP256在汽车电子中的应用[J].国外电子元器件,2003(2):23-25.
[6] 何汉青,李宁.基于云计算的MCU应用开发平台[J].武汉理工大学学报:信息与管理工程版,2011,33(4):544-547.
[7] 季学武,马小平,周寒露.电动助力转向系统光电式扭矩传感器的研究[J].仪表技术与传感器,2004,8(10):4-6.
[8] 罗石,商高高.EPS电机驱动电路设计方案的研究[J].江苏大学学报,2004,25(6):488 -491.
[9] 施国标.电动助力转向系统的建模与仿真技术[J].吉林大学学报:工学版,2007,37(1):31-36.
[10] 吴锋,杨志家.电动助力转向系统控制策略的研究[J].汽车工程,2006,28(7):666 -680.
[11] 吴文江,季学武.电动转向控制系统跟踪性能研究[J].机械工程学报,2004,40(4):77 -80.
[12] 周斌,赵光明,陈雷.基于虚拟仪器的车辆传动系统扭振测试与分析[J].武汉理工大学学报:信息与管理工程版,2011,33(4):604 -607.
