基于GPS 和车辙的三维路面重构
2012-07-31马荣贵汪花梅
马荣贵,汪花梅
(长安大学 信息工程学院,陕西 西安710064)
随着路面检测技术的快速发展,数据采集系统已相当成熟和完备,但相对滞后的路面重构技术却无法直观地将大量的检测数据应用到道路养护维修中[1].传统的路面三维重构模型的数据一般来自从影像中提取的道路特征数据、采用地理定位系统(global positioning system,GPS)或全站仪野外测量的离散数据以及公路设计数据等[2].建立的三维重构模型一般只能反映道路的宏观信息,如公路附属设施的定位及查询,公路周边地形环境等,而对于路面表面的行车安全信息如平整度、车辙等信息基本上不能直观地表现出来,特别是无法分析对行车安全危害最大的拥包(在行车水平力的作用下,使路面产生推移而形成局部不规则隆起的变形)和坑槽(在行车作用下,路面骨料局部脱落而产生的坑洼)信息,因此难以满足道路质量评估和养护的需求.
本文首先建立路面的三维重构模型,然后完成GPS和横断面车辙数据的融合,构造出用于绘制路面的三角形网格的点阵,最后基于OpenGL完成重构路面的绘制,实现真实路面三维仿真.由此建立的三维路面,能够将道路检测数据准确地再现,便于决策者直观地观察路面的坑槽和拥包,有效地推动了路面的数字化管理.
1 路面三维重构模型
由于检测车采集道路数据时的采样频率或空间步长不同,为了实现数字路面的三维显示,建立一个统一的坐标系十分重要[3].本文建立了以路面里程为X轴,横断面为Y轴,各点相对高程为Z轴的三维坐标系来完成三维重构,如图1所示.其中线段AB是被测路面的起始横断面,C为路面上的任意点,xi为各点的里程坐标,yj(j=1,2,…,m)为各点的横断面坐标,zij为各点的相对高程坐标.

图1 路面三维模型坐标系Fig.1 3D model of road coordinate system
在该三维模型坐标系下,路面实体R可以表示为一个连续的三维函数f(x,y,z),即:R=f(x,y,z).要实现路面三维函数R的准确描述,需选用一个基准测试平面,且平行于XOY平面,该假设基准面方程为:z=D.其中D表示该平面和XOY平面间的距离.为了便于分析,选择基准测试平面和XOY平面重合,即D=0.
设路面上各点到该基准面的距离为{xi,yj,zij},如图中的A(x1,y1,z11),B(x1,ym,z1m),那么三维路面实体R可表示如下:
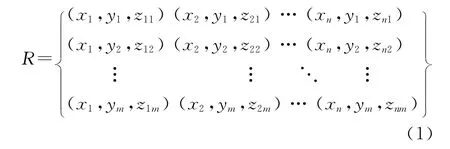
对于x坐标相同的各点有:
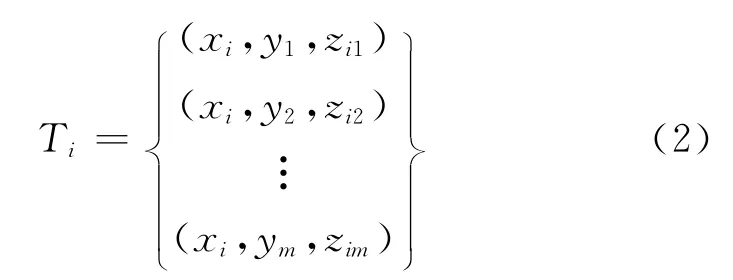
Ti表示路面R的一个横断面.因此,路面R可以表示为所有横断面的集合:

由于路面横断面的检测是采用多点准直激光传感器来实现的,故每一个横断面是由多路车辙数据构成的一组离散点.在三维重构中,x和y值由大地坐标系的经纬度表示,z值是由GPS大地高程和横断面车辙叠加所求到的.
2 GPS与车辙数据的融合
2.1 基于Cardinal插值的GPS处理
系统中采用北京星网宇达的高精度GPS,定位精度1.5 m,可以测量天线中心所在位置的经纬度坐标以及海拔高度,最高采样频率为20 Hz.根据GPS返回的GPGGA(GPS的输出格式之一)指令中的海拔数据并配合光电编码器的里程数据,就可以得到路面的高程曲线.车辙的采样频率由光电编码器控制,其采样步长为0.05 m.路面是一个光滑连续的实体,由于GPS采集频率的限制,采集的GPS点是比较稀疏的散乱数据[4],因此,为了完成GPS和车辙的融合,通过以GPS点为控制点进行插值,并在插值后的点中筛选得到更为稠密的点是一个很重要的环节.
本文以现有的GPS点为控制点,通过Cardinal三次样条曲线插值算法计算出大量有序的关键点.Cardinal插值算法在灵活性和计算速度之间提供了一个合理的折中方案,不仅具有二阶连续性,而且只需较少的计算和存储空间,稳定性较好.
设p(u)是三次Cardinal样条曲线,由4个连续控制点pk-1、pk、pk+1、pk+2给出.这4个控制点用于建立Cardinal样条的边界条件如下:
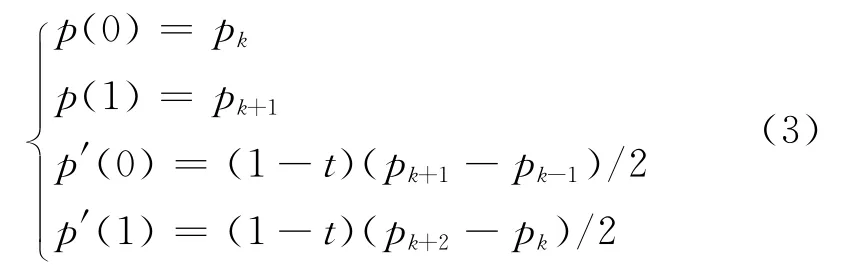
式中:pi为第i个控制点;p(u)为插值点,u∈[0,1],t为张量参数,控制Cardinal样条与控制点间的松紧程度,并且从式(3)中可以看出,曲线的切线值由控制点本身决定.
根据边界条件,可得Cardinal样条插值公式为
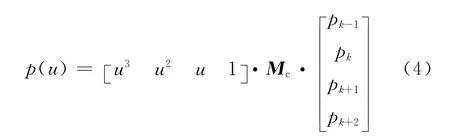
式中:MC为Cardinal矩阵.
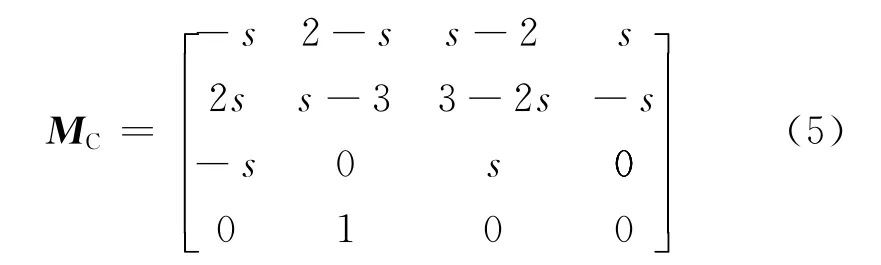
式中,s=(1-t)/2,将式(4)展开得到多项式:
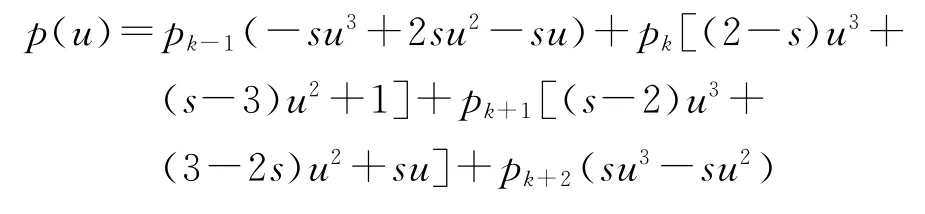
根据Cardinal插值公式,把有限的GPS点当作控制点,设置公式中u的增量足够小,对GPS点进行插值.
由于车辙的采样频率远高于GPS的采样频率,故一段路程内车辙的采样次数远大于GPS的采样次数.由于车辙的采样步长是固定的,GPS是非等间距的,所以为了完成GPS与车辙的融合,需要在以原始GPS点为控制点进行插值后的点序列中选出与车辙采样次数相同的个数的点,且所选取的这些点要求是等间距的.
选取等间距GPS点的处理方法为,在GPS曲线上选出使每一段弧长相等的GPS点.首先对GPS数据从第一个点开始做累加操作,直到该弧长等于目标长度,则将该点纳入等间距点的集合,并从该点重复以上操作直至完成.如一条由20个控制点构成的曲线,需要选择1 000个弧长相等的曲线点,那么首先可设Δu=0.000 1,也就是在每2个控制点间将构造出10 000个插值点,这样整条曲线总共有19万个插值点.然后对这19万个点间距离求和,得到曲线的弧长为k,接着从曲线的起始点开始查找,找到每一个累加点间距离为nk/1 000的点(n=1,2,…,1 000),这些点就是1 000个满足要求的等间距点.至此,完成了GPS点的插值以及等间距点筛选的操作.
2.2 GPS扩展
GPS插值后的等间距点在三维坐标系中只能绘制出一条曲线,即道路的中心线.然而道路并不是简单的一维线段,它是有一定宽度的面状实体,有一个或多个车道组成的复杂对象[5].由于横断面车辙是由检测车横向刚性梁上以间距d均匀排列23个准直激光传感器采集到的,因此首先把道路中心线以一车道宽度扩展成二维平面,最后融合横断面上的23路车辙数据,生成绘制三维图形所需的网格顶点点阵.
GPS扩展示意图如图2所示,X轴方向为经度,Y轴方向为纬度,其中p1,p2,p3是以GPS点为控制点插值后筛选出的点,代表了道路的中心线,连线p1p2和X轴的夹角为α.A,B分别表示以一定车道宽度扩展后的道路左右两边的点,扩展步骤首先分为以下三步:①相邻两个插值点连线,过其中一个点做该连线的垂线段,垂线段的长度设定为路面的宽度;②根据路面宽度,以道路中心线上的点为中心,在垂线段上取等间距的两点,这两点即为扩展后得到的点;③重复步骤①和步骤②,直至所有GPS点扩展完成.
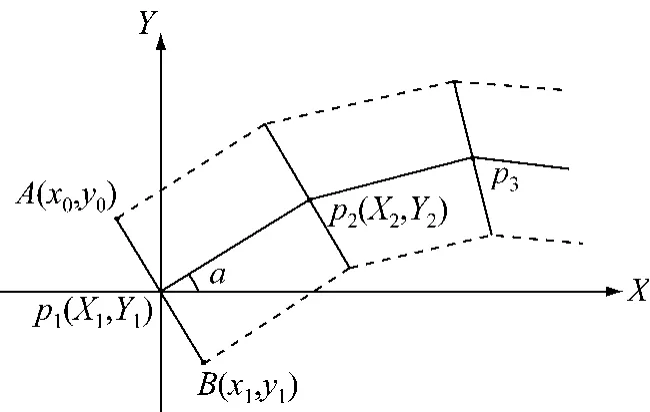
图2 GPS扩展Fig.2 GPS extended
根据以上对扩展步骤的分析,具体的扩展过程如下:
p1(X1,Y1),p2(X2,Y2)分别为两个有序的 GPS插值点,连接p1,p2两点,过p1点作p1p2的垂线AB,设p1p2的斜率为k,则有:k=(Y2-Y1)/(X2-X1)=tanα.设一个车道的宽度为d,则AB=d,那么:
P1A=p1B=d/2
根据图2可以求出A,B两点的经纬度.设A点经纬度为(x0,y0),B点经纬度为(x1,y1),过p1点作p1p2的垂线AB,AB与Y轴的夹角也为α,那么,A、B两点的经纬度值分别为
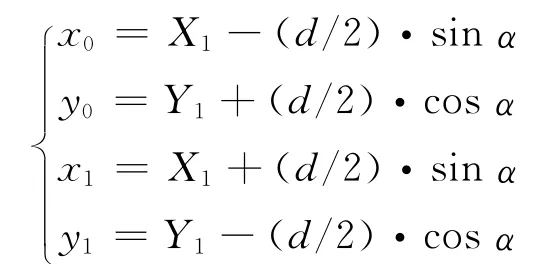
扩展后,可计算出A点的经纬度值是(x0,y0),B点的经纬度值是(x1,y1).
任意一横断面上有均匀间隔的23路车辙数据,为了完成任意一横断面上GPS与车辙的融合,接下来需要根据横断面中心线上的点和对应左右两边的扩展点完成横断面上均匀间隔点的经纬度的计算.根据A,B两点的经纬度值,在A,p1和B,p1之间分别均匀间隔生成10个插值点,求出每一点的经纬度坐标.这些插值点和A,p1,B总共是23个点,这23个点的经纬度坐标均已知,并且在同一高程,其高程值为Zi.
以此类推,可以利用第2个和第3个GPS点,第3个和第4个GPS点一直扩展下去,直到完成倒数第2个GPS点的扩展,对于最后一个GPS点,可以反向和倒数第2个GPS点进行扩展,此时所有的GPS扩展完毕.这样在三维路面重构模型中,融合基于纵断面的GPS信息和基于横断面的车辙信息,就能够成功建立基于纵断面GPS和横断面车辙的三维路面.
2.3 GPS高程和车辙的融合
路面横断面车辙采集过程中,检测横梁须保持统一的测量基准,检测横梁上均匀布置有23路激光位移传感器,检测车在任意一个横断面上采集23路车辙数据,记录为d1,d2,…,d23,如图3所示.
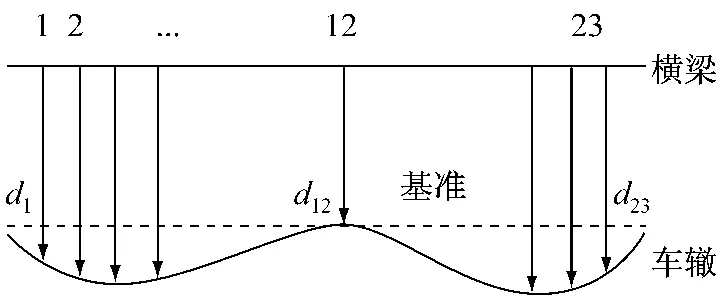
图3 路面横断面车辙模型Fig.3 Ruts model of road cross-section
以中间一路数据d12为基准,设各路车辙数据相对于基准的高程差为l1,l2,…,l23,那么有:

由于GPS安装在检测车车顶,且位于检测横梁的正上方,故系统中采集的高程点是在车顶,所以GPS高程要减去检测车的高度,这样得到的高程值才是路面高程.本系统中检测车是由依维柯中型客车改装而成,检测车的高度是h为2.5 m.已知GPS采集的高程是Zi,假设实际大地高程是Z′i,则有:
Z′i=Zi-h.那么可以得知任意一个横断面上有:

通过式(7),可以计算出每一个横断面上采集的车辙深度在大地坐标系中的高程,即在上文三维重构模型中的z值,这样便完成了GPS和车辙的融合.
当路面倾斜导致车体以及车体上的采集横梁倾斜时,检测横梁沿理想基准面产生一个倾角α,由于准直激光束是与刚性横梁垂直的,所以激光束也旋转了一个角度.此时激光束照射在路面上的位置与理想基准面照射到路面上的位置相比产生了一个横向的偏差且采集的车辙是垂直于横梁的斜高.而GPS的高程是竖直的,此时为了融合GPS和车辙,首先要对采集的车辙进行一个处理.假设基准面上的检测得到的横断面车辙曲线为T,检测横梁侧倾振动后测量到的横断面车辙曲线为T′,根据T和T′的关系以及侧倾后检测横梁与理想检测基准面的夹角α,运用最小二乘法去除检测结果中的趋势项[6],就可以得到近似于理想检测基准面的横断面曲线,那么就可以求出各路车辙数据相对于基准的高程差l1,l2,…,l23.此时,再利用式(7)完成 GPS和车辙的融合.
实际的路面可以表示为一个连续的三维函数,然而检测车采集所得到的数据是由大量的GPS和横断面车辙离散点所组成的集合,融合GPS和车辙数据,在已经建立好路面三维模型中,构成一个离散有序的点阵,通过OpenGL将其以三角形网格的形式绘制出来.由于横断面数据采集的激光头个数有限,所以激光头间距较大,导致构造出的三维路面不够光滑.为了绘制出光滑逼真的三维路面,试验中最后采用了内插法完成了三维曲面的插值.
3 基于OpenGL的三维路面绘制
基于OpenGL的三维图形绘制的本质是利用Open GL图形库所提供的函数来绘制虚拟空间中的点、线、面,通过对这些图元的绘制、移动、组合以及光照和渲染并最终投影到计算机显示屏上,从而在视觉上形成逼真于真实空间的物体,这在某种程度完成了对现实世界物体的仿真显示.组成三维图形的基本图元的绘制取决于OpenGL三维空间中点的坐标值,称这些点为顶点,三维空间中所有的直线、曲线、平面或曲面都是由无数的顶点组成的.
试验中采用以上的理论和方法完成了三维路面的绘制,运用OpenGL图形库在Visual Studio2005编程环境下开发了测试软件.为完成路面的三维重构,2010年12月在河南洛阳选取了一段坑槽、拥包较多的路面进行检测,最终实现的三维重建效果如图4—5所示.

图4 三维重构网格路面Fig.4 3D reconstruction of grid road
如图4所示,在已建立的网格路面上,可以很明显地观察出路面车辙.由于重构中融合了GPS经度和纬度信息,在重构的三维路面中可以体现出该段路程道路的轨迹,故重构的路面更加逼真于真实的路面.如图5所示的彩色路面,是根据路面高程给三维路面渲染不同的颜色,通过颜色的变化来表现路面的高低起伏.在该图红色方框区域是两个坑槽,在重建路面上明显可以看出对应的两个坑槽.并在后期处理中计算坑槽的容积.
图5 三维重构彩色路面Fig.5 3D reconstruction of color road
实验中将重构的三维路面和道路环境视频相结合,可以实现三维路面和环境视频文件的同步播放,在三维路面漫游的同时可以观测到对应路面的真实路况环境.还可以在观看道路视频同时,如果发现视频中路面上有坑槽,直接把三维路面定位到相应的位置,查看坑槽的形状和容积.最后将此信息提供给相应的管理部门决策者,在制定路面养护规划上将有着重大指导作用.
4 结语
本文首先建立了路面三维重构模型,并完成了GPS和车辙的融合,绘制出了三维网格路面,三维彩色路面和纹理路面.在重构的三维路面上可以查看路面车辙以及道路轨迹,同时可以查看路面的坑槽和拥包,能够立体直观地观察路面破损情况,为制定养护方案提供重要的数据依据.
[1] 啜二勇.国外路面自动检测系统发展综述[J].交通标准化,2009(17):96.CHUO Eryong.Development summary of international pavement surface distress automatic survey system [J]. Transport Standardization,2009(17):96.
[2] 左小清,李清泉,唐炉亮.公路三维模型建立与数据组织[J].武汉大学学报,2004,29(2):179.ZUO Xiaoqing,LI Qingquan,TANG Luliang.3D modeling and data organization of highway[J].Geomatics and Information Science of Wuhan University,2004,29(2):179.
[3] 马荣贵.路面三维检测系统原理及方法研究[D].西安:长安大学公路学院,2008.MA Ronggui.Study on the principle and method of road three dimension measurement system[D].Xi’an:School of Highway of Chang’an University,2008.
[4] 左小清,李清泉,谢智颖.基于车道的道路数据模型[J].长安大学学报:自然科学版,2004,24(2):73.ZUO Xiaoqing,LI Qingquan,XIE Zhiying.Lane-based road data model[J].Journal of Chang’an University:Natural Science Edition,2004,24(2):73.
[5] 杨益明,文爱民,刘奕贯.三维路面模型的构建及其在Adams中的验证[J].公路交通科技,2010,27(12):140.YANG Yiming,WEN Aiming,LIU Yiguan.Reconstruction of 3D road model and its verification based on adams[J].Journal of Highway and Transportation Research and Development,2010,27(12):140.
[6] 王建锋,马建,马荣贵,等.路面三维检测技术研究[J].武汉理工大学学报:交通科学与工程版,2010,34(6):1202.WANG Jianfeng,MA Jian,MA Ronggui,et al.Road Threedimensional shape measurement method with multi-laser-sensors[J].Journal of Wuhan University of Technology:Transportation Science &Engineering,2010,34(6):1202.
