旋转变压器正余弦绕组的确定方法
2012-07-30黄晓凡
黄晓凡
(北京普利门电子科技有限公司,北京 100041)
0 引言
旋转变压器能够给出永磁同步电动机或者无刷直流电动机转子的位置信号,供电动机换相及位置控制时使用,它是一种重要的角度传感器。旋转变压器在出厂后会有正弦绕组和余弦绕组的标记(在约定正向旋转方向的情况下)。如果标记遗失,就需要确定正弦绕组和余弦绕组。目前,很少有文献介绍其确定方法。本文针对正弦、余弦旋转变压器的工作原理,提出了一种简单易行的确定方法。
1 旋转变压器工作原理
旋转变压器主要由定子和转子2部分组成,定子上有激磁绕组,输入激磁电压U(t)(引出线端子U+,U-分别记为 E,F),转子上有正弦绕组和余弦绕组,分别输出正弦输出电压Usin(引出线端子Usin+,Usin-分别记为 A,B),余弦输出电压 Ucos(引出线端子 Ucos+,Ucos-分别记为 C,D),3 个电压信号的波形图如图1所示(也可以是转子上为激磁绕组,定子上为正、余弦绕组,不影响分析结果)。
输入激磁电压U(t)=Um(2πft),称之为载波,为方便分析,本文中载波频率定为f=500 Hz,幅值Um=20V,变比 K=1。
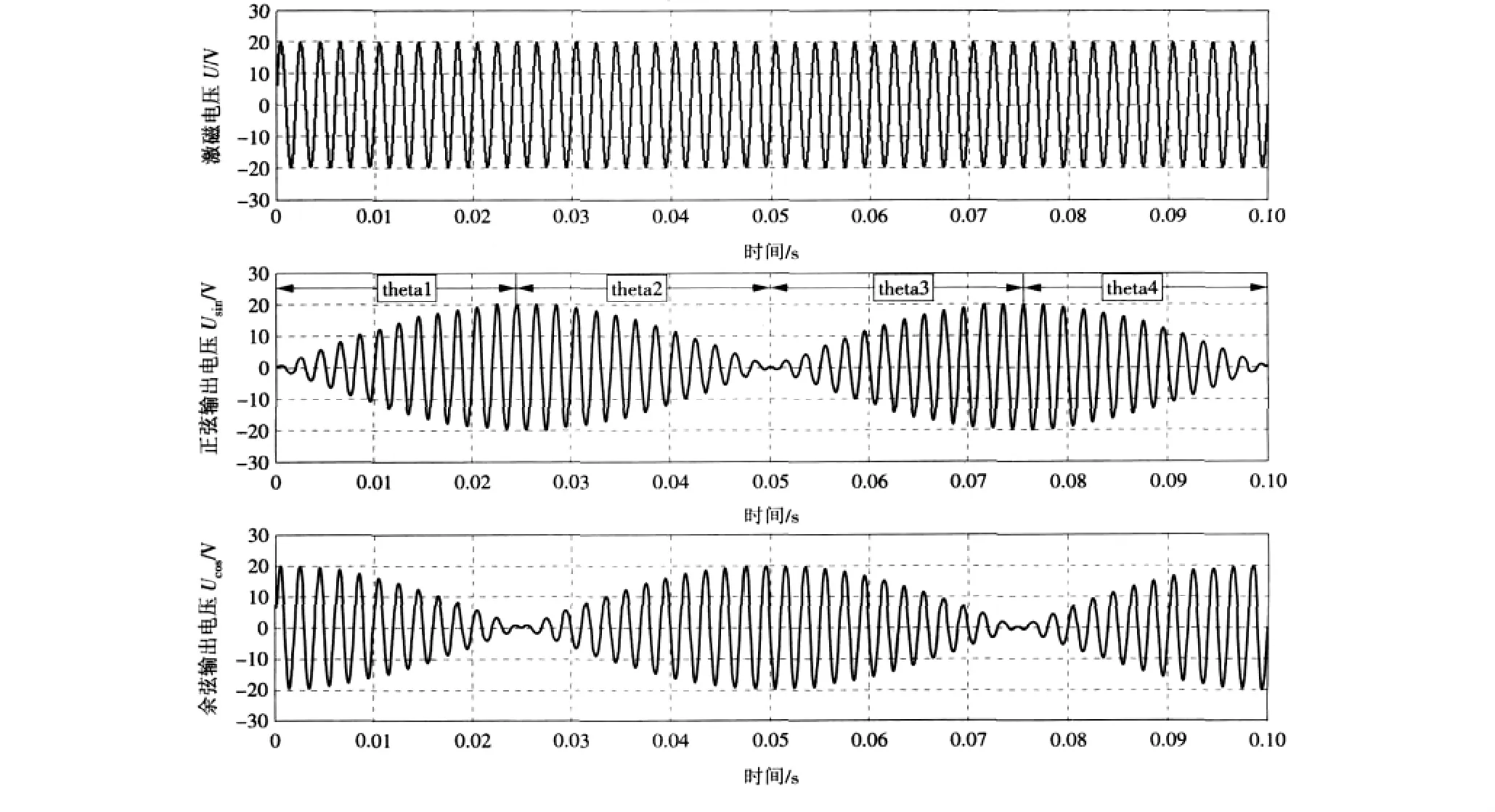
图1 旋转变压器激磁信号电压U(t)波形、正弦输出电压信号U sin波形和余弦输出电压信号U cos波形
旋转变压器在绝对参考系(本文使用东-北-地绝对参考系,当然,可以自己定义相对于北-东-地绝对参考系固定不变的其他绝对参考系)中安装完毕后,在使用旋转变压器前,首先规定好绝对参考系下的正方向,以下假定逆时针为正方向(即旋转变压器转轴角度增加的方向),假定旋转变压器的零位与东方向重合(零位是指转轴处于此位置时,正弦绕组输出幅值为0而余弦绕组输出幅值为正最大),其结果如图2所示。

图2 绝对参考系中旋转变压器正弦输出电压U sin和余弦输出电压U cos的向量图
当转子由绝对零位按绝对正方向转过θ时,输出正、余弦电压分别为[1-2]

一般来说,由式(1)、式(2)即可解得θ。如果利用上RDC电路(如AD2S1200)只需要将Usin正负端和Ucos正负端分别输入到AD2S1200对应的sin,sinlo信号和cos,coslo信号引脚即可工作。本文主要研究正弦、余弦绕组即 Usin+,Usin-和 Ucos+,Ucos-的确定。
2 引论
将正弦绕组引出端子 A,B互换,即 UAB变成UBA,而余弦绕组引出端子C,D不变,则原来的余弦绕组就变为正弦绕组(即端子C为Usin+,端子D为Usin-),而原来的正弦绕组就变为余弦绕组(即端子B为Ucos+,端子 A为 Ucos-)。此引论从图3中易看出。
3 旋转变压器正余弦绕组的确定步骤
(1)量取4个引出点的电阻,可确定2组绕组:sin+(注意这是假定的 sin+,记为 A),sin-(假定的sin-,记为 B)和 cos+(假定的 cos+,记为 C),cos-(假定的cos-,记为D)。注意此步骤后既不能确定sin和cos绕组,也不能确定各绕组的+,-。

图3 正弦绕组引出端子A,B互换后与互换前的旋转变压器输出电压的向量对比图
(2)先假定 A对应 sin+,B对应 sin-,C对应cos+,D对应cos-。下面的假定是以这种假定为正确来进行分析。输入激磁电压U(t),将A,B分别接示波器1通道CH1正、负端,C,D分别接示波器2通道CH2正、负端。
(3)按规定正方向慢慢用手转动旋转变压器转轴(不要求匀速),观察示波器1,2通道波形。
当旋转变压器转轴位于绝对参考系I象限时,即90°>θ>0时,对应图1中theta1区间。从图1中也可以看出,示波器上CH1波形UAB和CH2波形UCD的载波是同相位的(注意是500Hz载波,而不是包络波)。当旋转变压器转轴位于绝对参考系II象限,即180°>θ> 90°时,对应图1中 theta2区间。示波器上CH1波形UAB和CH2波形UCD的载波是反相位的。当旋转变压器转轴位于绝对参考系III象限,即270°>θ> 180°时,对应图1中theta3区间。示波器上CH1波形UAB和CH2波形UCD的载波是同相位的。当旋转变压器转轴位于绝对参考系IV象限,即360°>θ> 270°时,对应图1中theta4区间。示波器上CH1波形UAB和CH2波形UCD的载波是反相位的。从图2、图3可以看出,当UAB的包络波(注意不是500 Hz载波)幅值过0后且达到最大值之前,意味着旋转变压器转轴位于I象限或者位于III象限。从上面分析可知,无论哪种状态,此时示波器上Usin和Ucos的载波都是同相位的。以上是假定UAB是真实的正弦绕组输出Usin得到的结论。如果UAB是真实的余弦绕组输出Ucos,则按照上述分析可以得出下面结论:当UAB的包络波幅值过0后且达到最大值之前,意味着旋转变压器转轴位于II象限或者位于IV象限。无论哪种状态,此时示波器上Usin和Ucos的载波都是反相位的。
(4)综上所述,旋转变压器正余弦绕组的确定方法如下:按正方向用手转动旋转变压器,使UAB载波的幅值过零后再调大一些,并且保证没有达到最大值(这很容易用手微微转动转轴做到),对比示波器CH1和CH2载波相位,如果同相,则A即sin+,B即 sin-,C 即 cos+,D 即 cos-;如果反相,由引论,则A 即cos-,B 即 cos+,C 即 sin+,D 即 sin-。
4 结束语
在规定完正转向后,正弦、余弦旋转变压器的正弦绕组和余弦绕组就被确定了。一般来讲,一个旋转变压器在出厂后会有正弦绕组和余弦绕组的标记。但是,如果标记遗失,就需要方法去确定正弦绕组和余弦绕组。本文提出的通过对比2路输出电压信号的相位关系来确定正弦绕组和余弦绕组的方法,简单易行,科学合理,是一个很好的办法。
[1]程明.微特电机及系统[M].北京:中国电力出版社,2004.
[2]陆元九.惯性器件[M].北京:宇航出版社,1990.
