增量式光栅编码器在激光扫描雷达的应用研究*
2012-07-25徐卫明
杨 孟,徐卫明,肖 林,舒 嵘
(中国科学院上海技术物理研究所,上海 200083)
0 引言
激光雷达对目标的探测需要以发射激光对探测目标的扫描为前提,现有的扫描方式有多种,大体可分为电光扫描、声光扫描、光机扫描3种[1,2]。电光扫描和声光扫描没有运动部件,且体积小,速度快,但扫描角度小,技术上还不是很成熟。目前应用较多的还是光机扫描,常见光机扫描装置主要有:振镜扫描、旋转棱镜扫描、光纤扫描、旋转正多面体扫描和快速指向镜扫描[3]。
振镜扫描是通过X-Y轴电机带动反射镜片偏转来实现平面扫描的,采用增量式光栅作为扫描电机的转角传感器。增量式光栅编码器具有结构简单、测量范围广、精度高、非接触测量、数字式输出等优点[4]。本文针对增量式光栅传感器在全数字振镜扫描系统中的应用进行实验研究。
1 光栅编码器工作原理及其测量电路
1.1 光栅编码器工作原理
一个完整的增量式光栅编码器主要由光栅、发光二极管、透镜、光电二极管接收器四部分组成。
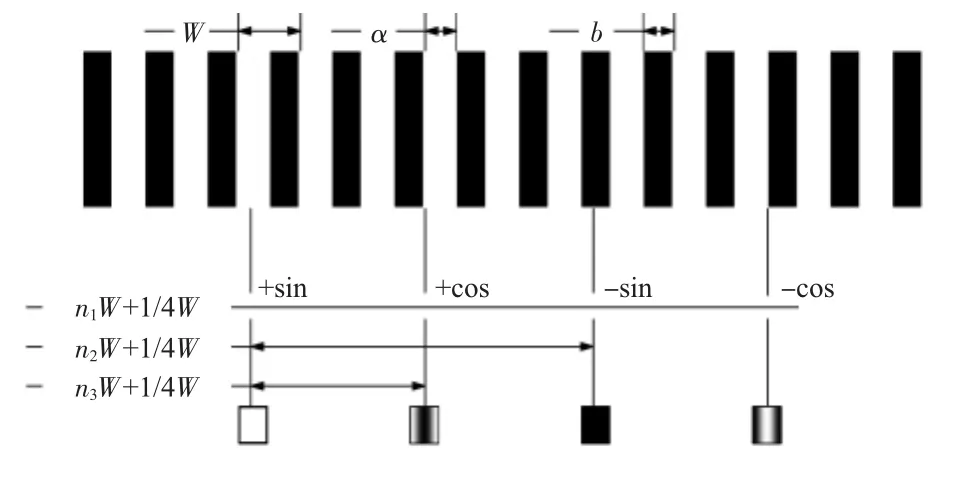
图1 光栅刻线示意图Fig 1 Schematic diagram of the grating graduating
增量反射式光栅编码器是基于光栅相对光电二极管接收器运动时形成的莫尔条纹进行工作的,莫尔条纹是增量反射式光栅编码器工作的基础。莫尔条纹的特性由光栅刻线决定,光栅刻线如图1所示。α为刻线宽度,b为缝隙宽度,W为光栅栅距,相邻的2个光电二极管安装间距为(n+1/4)W。当光栅相对光电二极管接收器运动时,输出一对相位相差90的正交正弦差分信号

式中Uav为输出信号中直流分量,Um为幅值,θ为相位偏移量,x为光栅位移。当光栅移动一个光栅栅距时,输出信号输出一个正弦周期。当正向移动时,ua超前ub90°;反之,ua滞后ub90°。可见光栅的移动距离和移动方向包含在输出信号的相位中。
1.2 增量式光栅编码器测量电路
一般的增量式光栅编码器测量电路包括信号放大、整形、细分、四倍频、判向以及加减计数六部分组成。
由于增量式光栅编码器的刻线有限,原始输出信号的分辨率一般达不到要求。如美国GSI/MicroE Systems公司的Mercury 1200R1206,光栅栅距L为20 μm,光学直D为10.05 mm,分辨率为 3.808 mrad(或 0.218°)。在激光雷达中,扫描机构的扫描精度一般在角秒级。可见一般光栅在不进行细分的情况下很难满足要求。目前常见的细分方法主要有3种[5~7]:查表法、RBF神经元网络倍频法以及二相型PLL法。前2种方法的基本原理相同,都是对输入的原始信号进行采样,然后合成高频信号,推导出原始输入信号的相位变化情况,即光栅的位移。不同之处在于,第二种方法在第一种方法的基础上增加了对原始输入信号的预处理,如纠正直流误差、相位偏差、幅度偏移以及波形失真等,但实现起来比较困难。
通过细分后的输出的信号为两路相差90°的方波信号。正向时,A 超前于 B,状态变化规律为 00,10,11,01;反向时,A 滞后于 B,状态变化规律为 01,11,10,00。A,B 输出的方波数和圆增量式光栅转过的角度是线性关系,累计输出的方波数及其相互间的相位关系即可计算出电机转角的位置[8,9]。
2 测试系统设计
圆增量式光栅编码器将电机角度的变化转换为正交方波脉冲的增减计数,为了对增量式光栅编码器在激光振镜扫描系统中的性能进行测试,本文设计了一种基于DSP的振镜电机数字控制系统。增量式光栅编码器安装在振镜电机底部,每转输出正弦周期计数1650,输出三对差分信号:两对正交的正弦差分信号,一对用于指示光栅零点的矩形脉冲差分信号。采用查表法对光栅信号进行16倍细分后进入DSP,再进行4倍细分和辨向计数,计算出电机的转角位置。通过细分后,增量式光栅编码器的角度分辨率

同时,对振镜电机的电枢电流进行A/D采用,和转角一起反馈给DSP,对振镜电机进行控制。上位机通过RS—232串口对DSP进行控制,如电机的转停、控制参数的设置以及电机状态的监视等。
3 实验测试与标定
为了对增量式光栅编码器的实际性能进行测试和标定,需要采用另外一种精确方法对电机的转角进行测量,然后与增量式光栅编码器的测量结果进行比较。这里采用光电经纬仪对电机的实际转角进行测量,其精度可以达到0.5″,测试标定装置原理图如图2所示。

图2 光栅传感器测试标定装置原理图Fig 2 Principle diagram of testing and calibration equipment for grating sensor
3.1 线性度测试和标定
理论上电机转角和增量式光栅编码器计数是线性关系,θ=KΔθ,其中,K为增量式光栅编码器计数,Δθ光栅细分后的分辨率,θ为电机转角。测量方法如下:将振镜电机连同扫描镜固定在支架上,一起放置于高精度转台之上,数字控制系统加电将振镜电机转角控制在零位,调节经纬仪使光束和镜面垂直,同时对转台数显仪清零。然后通过指令控制电机旋转一个固定角度,反向调节转台,使光束和镜面重新垂直,从转台数显仪得到一个转角,这转角就是相应的电机的实际转角。依次输入一组转角,从光电经纬仪测出电机的实际转角。光栅传感器的绝对误差曲线和线性拟合曲线如图3所示。
光栅编码器的绝对误差和线性度主要是由光栅的机械加工和安装精度决定的,包括安装偏心、安装倾斜以及转动轴晃动等,其中安装偏心对栅编码器的绝度误差和线性度影响最大,其它因素可以忽略[10]。假设光栅读数头所在圆的圆心和光栅所在圆的圆心的连线经过光栅编码的指示窗口,则由安装偏心引起的误差θe和光栅转角θ之间的关系为


图3 光栅传感器的绝对误差曲线和线性拟合曲线Fig 3 Absolute error curve and linear fitting curve of optical grating sensor
当θe,θ较小时,式(4)变为



采用线性拟合可得到K=-1.234 886。将r=D/2=5.025 mm带入式(6)可得d=3.45 μm。可见安装的偏心距离还是比较小的,光栅编码器具有较好的线性度。由测量结果计算可得,该增量式光栅编码器的线性度可以达到99.97%。
3.2 重复定位误差测试
重复定位误差决定了增量式光栅编码器静态误差。采用重复上电多次测量静态误差的方法,可以测量振镜系统的重复定位误差。静态误差是指在稳态时命令角度和实际测量角度之间的误差。采用振镜测试系统,测量振镜在不同控制角度下的实际偏转角度,每次测试从-10°~+10°,间隔为1°,共21个固定的角度。测完一次后,振镜电机控制系统断电后再上电,进行新的一次测量,总共进行了12次测量。经过处理得到增量式光栅编码器的重复定位误差标准方差曲线,如图4、图5所示。重复定位标准方差是每个测量点的12个数据求标准方差,即

θi1为第i个角度的第j次测量值,i=1,2,…,21,j=1,2,…,12。重复定位误差最大值是每个测量点的最大值和最小值的差值,即

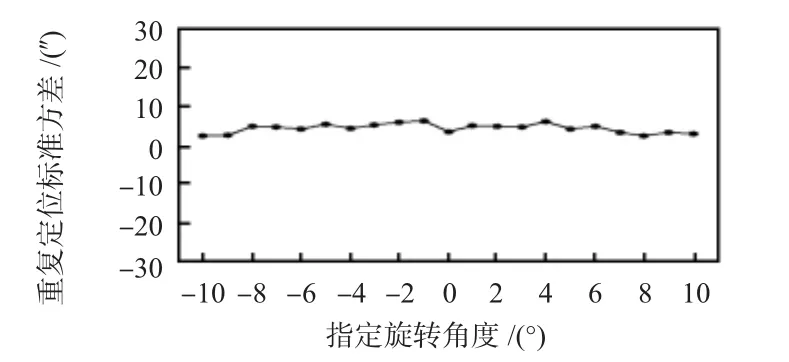
图4 光栅传感器的重复定位标准差曲线Fig 4 Repetitive locating standard deviation curve of optical grating sensor

图5 光栅传感器的重复定位误差最大值曲线Fig 5 Repetitive locating maximum error curve of grating sensor
4 结论
本文对增量式光栅编码器的工作原理和测量方式进行了论述,并对增量式光栅编码器在全数字振镜扫描系统中的应用进行了系统研究和实验。进行了增量式光栅编码器细分模块和基于DSP数字控制系统的设计,通过高精度光电经纬仪对增量式光栅编码器的线性度和重复定位精度进行了实验测量,并对测量结果进行了理论分析。实验结果表明:增量式光栅编码器结构简单、测量范围广、精度高、非接触测量、数字式输出等优点,可以为激光雷达扫描系统提供高精度的位置信息。
[1]石顺祥,李家立,王广生,等.一种新型的光波导阵列电光快速扫描器[J].光学学报.2002,11,22(11):1318 -1322.
[2]胡居广,李学金,张百钢.转镜—振镜扫描的非线性及非对称性研究[J].光电工程.2004,31(3):26 -29.
[3]毛闵军,金 辉,卜弘毅,等.电容位置传感器在激光扫描雷达的应用研究[J].传感器与微系统.2010,11(29):20.
[4]张世轶,艾 华,韩旭东.新型光电轴角编码器的发展与应用[J].长春理工大学学报.2005,128(14):43.
[5]Tan K K,Zhou Huixing,Lee Tongheng.New interpolation method for quadrature encoder signals[J].IEEE Transactions on Instrumentation and Measurement,2002,51(5):1074.
[6]Wang Lei,Emura T.High interpolation using son-sinusoidal twophase typepll[C]//IEEE International Conference on Intelligent Processing Systems,Beijing,1997:28 -31,82 -85.
[7]Tan Kok-kiong,Tang Kok-Zuea.Adaptive online correction and interpolation of quadrature encoder signals using radial basis functions[J].IEEE Transactions on Control Systems Technology,2005,13(3):371 -372.
[8]Matsuzoe Yuji,Fujita Kouetsu,Tsuji Nobuhiko.The study of the high-performance encoder using the encoder model in the computer[C]//Part of the OSI/SPIE Conference on Optical Engineering for Sensing and Nanotechnology,ICOSN’99,Yokohama,Japan,SPIE,1999.
[9]Jiang Jing,Jiang Dongfang,Gao Hang.A high accuracy interface circuit ddsign for incremental photoelectric encoder[J].Measurement and Control technology,2009,28(2):1 -3.
[10]黄宗升,泰石乔,王省书,等.光栅角编码器误差分析及用激光陀螺标校的研究[J].仪器仪表学报,2007,28(10):1867.