基于照度的SAR图像均衡算法研究
2012-07-25梁福来张汉华周智敏
梁福来 宋 千 张汉华 周智敏
(国防科技大学电子科学与工程学院 长沙 410073)
1 引言
与传统机载合成孔径雷达(Synthetic Aperture Radar, SAR)相比,无人机载超宽带合成孔径雷达(Ultra-Wide Band Synthetic Aperture Radar,UWB SAR)更具有机动性、隐蔽性和安全性,能够更好穿透叶簇和浅层地表,探测到浅埋雷场等重要军事目标。但无人机等小型平台由于体积较小,在低空飞行时受气流等的影响较大,飞行航迹往往表现为非直线航迹,同时伴有剧烈的姿态抖动[1],雷达天线的主波束指向随姿态抖动相应发生大幅抖动。尤其在UWB SAR条件下,超宽带和超宽积累角特性使得运动补偿尤为困难。后向投影(Back-Projection, BP)算法便于结合传感器数据进行运动补偿,与频域聚焦算法相比能够更好适应高度非直线航迹的位置抖动补偿[2,3],在轻小型无人机载高分辨率SAR成像中受到越来越多的关注。
在SAR成像模型中,往往将天线假设为全向均匀辐射源,因此包括BP在内的一般运动补偿处理仅仅考虑飞行平台位置的校正,而较少关注波束中心指向抖动及天线波束方向图对成像的影响[4,5]。传统方法往往对位置补偿后,将进行简单辐射校准后的成像结果视为地面的后向散射特征[6]。但这些校准方法大多是在匀速直线航迹假设下推导得到的,并未充分考虑成像几何,因此对于存在较大运动误差,特别是存在较大姿态误差的情况下,经过辐射校准后的实际BP图像一般仍存在图像增益不均衡现象。
传统上对图像增益不均衡的处理主要包括以下两种方式:(1)在回波域,匀速直线航迹假设下,根据雷达方程在斜距向上以 1/r2的关系进行辐射校正[7],但在实际应用中,机载SAR不可避免存在一定的位置和姿态抖动,并不符合该类校正方法的前提假设;(2)在图像域,利用图像均衡方法抑制图像增益不均衡。图像均衡可分为单帧图像均衡和基于多视图像均衡两类。单帧图像均衡一般在以某像素点为中心的局部窗口内计算均值和方差等统计特性并据此进行自适应均衡[8]。基于多视图像均衡的主要途径是先杂波抑制,然后采用类似单帧图像增强的方法进行处理[9]。图像均衡方法仅依据图像的统计特性,并未区别由于飞行误差造成的雷达波束照射功率和目标散射强度的本质不同,即未考虑到SAR成像模型的特殊性。
当航迹不符合匀速直线假设,即非直线航迹并存在姿态变化时,波束指向和积累角会引起照射能量的不均衡。作者在深入分析成像机理后,给出了雷达单位面积照射能力—— “照度”的定义和数学表达式。照度与地面目标散射特征无关,由成像几何、天线方向图、积累孔径设置等决定,反映了单位幅度的理想点目标雷达信号照射强度。雷达图像的幅度可视为目标真实散射幅度与照度的乘积,因此照度不均衡将导致成像结果增益不均衡。
在匀速直线航迹条件下,照度沿方位分布近似均衡,距离向的照度分布由天线方向图和积累孔径设置等决定,因此仅需要进行距离向辐射校正。在非直线航迹条件下,姿态抖动将破坏照度沿方位向的均匀分布,并导致距离向以1/r2关系辐射校正的前提不成立,导致SAR图像增益不均衡程度更加严重。由于传统图像均衡方法的局限性,虽然从表面上看图像增益基本均衡,但其结果无法反映真实的目标散射特征。照度概念的引出,有助于我们剔除成像模型给图像增益分布带来的误差,从而还原目标真实散射特征。
本文首先给出了照度的定义和计算公式,并得到雷达图像幅度等于目标后向散射幅度与照度的乘积,在此基础上提出一种基于照度先验信息的图像均衡方法。该方法在 BP成像过程中同时计算成像区域中各像素点的照度,依据获取的照度信息对成像结果进行加权,在还原图像真实散射强度的同时得到良好的均衡效果。
2 照度定义
SAR回波可以表示为
其中c为光速,v为积分区域,t为快时间,u为慢时间,pu为u时刻载机位置矢量,apu为pu处载机的姿态矢量,p为目标的位置矢量,s(t)为发射信号,g(pu,apu,p)为天线方向图函数,σ(pu,p)为p处目标的散射函数,R(pu,p)为u时刻载机位置pu到成像区域p点的距离:

经过理想脉冲压缩后,回波可表示为

其中δ(t)为狄利克莱函数。
为论述清晰,可认为位置测量值与载机的真实位置pu相等。结合运动补偿的BP算法公式为[7]

其中t2项补偿电磁波传播的幅度损失,w(pu,apu,p)为控制孔径长度的窗函数。在低空机载正侧视方式下,为了保证图像方位分辨率不随距离变化,通常采用固定积累角 BP(Constant Integration Angle BP, CIABP)算法。在CIABP算法中,w(pu,apu,p)的平均加权形式为

其中∠(·,·)为两向量之间的夹角,ΦI为选定的积累角宽度。
不失一般性,假设成像区域中仅在pT处存在一个理想点目标,即

则式(3)可改写为

将式(7)代入式(4)中得
容易得到

注意到在p≠pT,且R(pu0,p) =R(pu0,pT)时,BP累加曲线与目标的距离迁徙曲线只有一个交点((2/c)R(pu0,p),pu0),即此时BP成像结果只积累一次。此项可看作是pT处目标对其它区域的干扰。一般地,BP积累孔径较长,pT处BP图像的幅度值远大于pT处目标对其它区域的干扰。因此,式(9)可化简为

现在推广为成像区域中每个像素点,式(10)可改写为

定义照度如下:

可以看出,照度与目标特性无关,主要由成像几何、天线方向图、积累孔径设置等决定。反映的是单位幅度的理想点目标反射的雷达信号的总强度。BP成像结果可表示为

由式(13)可知,照度值随位置p变化,将改变目标之间的相对幅度关系,因此 BP成像结果并不能直接反映目标的真实散射强度,而可以视为照度与目前散射强度的乘积。
3 照度不均衡现象成因与影响分析
在高分辨率SAR成像应用,特别是超宽带超宽波束角SAR成像应用中,天线的波束角往往很大,辐射方向图比较平缓。为便于分析,与传统成像算法类似,此处假设g(pu,apu,p)恒定,用常数G表示,并将式(5)代入式(12)中,可得

由式(14)可知,在不考虑天线方向图及积累角内加权的情况下,照度值由落入波束范围内的积累孔径长度决定,与载机位置和姿态密切相关。下面将以 CIABP算法为例,在匀速直线航迹和非直线航迹两种情况下,分析照度的分布规律。
在载机做匀速直线运动时,apu保持恒定,天线波束中心保持同一指向(图 1(a)),pu为沿飞行方向的直线,方位采样均匀,成像几何沿方位向具有平移不变性,因此照度值沿方位向的分布是均匀的。由式(14)容易计算 CIABP算法照度值与距离成正比,直接导致距离向照度分布不均匀。
当载机做非直线运动时,姿态的抖动破坏了照度沿方位向的均匀分布。如图 1(b)所示,虽然目标A与目标B距离向位置相同,但波束方位指向大幅抖动使得目标A与目标B的积累孔径长度存在明显差异,引起照度方位分布不均。同时波束指向俯仰向抖动使得照度分布随距离的比例关系也被破坏掉,进一步加剧了距离向的照度不均衡。若考虑天线方向图及积累孔径内加权等因素,照度的分布将更加复杂,照度不均衡的现象将更加严重,进而导致最终图像增益分布不均,影响视觉效果的同时,降低同类目标幅度特征的一致性。
4 基于照度的SAR图像均衡
由式(13),图像真实散射强度可通过式(15)获得

经过照度补偿后,在还原图像真实散射强度的同时消除图像增益不均衡现象。结合 BP成像的基于照度信息图像均衡的完整流程如下:
(1)1维距离向脉冲压缩;
(2)传感器数据预处理;
(3)在成像区域方位向前后各留出半孔径作为回波孔径范围,在此范围内的方位采样参与积累;
(4)将成像区域划分为均匀网格pn,n=1,2,…,N;
(5)对方位采样pu处的距离压缩回波sR(t,pu)进行斜距向升采样,依据斜距距离以 1 /r2进行辐射校正;

图1 照度分布示意图
(6)根据式(2)计算网格上每一像素点pn到回波对应载机位置pu的距离R(pu,pn);
(7)计算成像网格上每一像素点相干积累的权值w(pu,apu,pn),并根据式(12)计算pu处雷达对像素点pn的照度贡献I(pu,apu,pn);
(8)根据距离值R(pu,pn)从升采样后的回波提取出对每个像素点有贡献的数据值S(pu,pn),并对其进行加权Sw(pu,pn) =S(pu,pn) ·w(pu,pn);
(9)将回波孔径范围内每条回波的有贡献数据矩阵相干累加得到全分辨聚焦图像Sw(pn),将I(pu,apu,pn)沿航迹累加得到照度值I(pn);
(10)基于照度值进行图像均衡Sw(pn) /I(pn)。
相对于已有的图像均衡算法,基于照度的SAR图像均衡的优势在于:
(a)校正由于载机位置和姿态抖动引起的图像增益不均衡,还原场景真实散射特征;
(b)已有的图像均衡算法一般需要对像素灰度统计分布做出合理假设,同时滑动窗尺寸等参数的选择也十分敏感,而照度值可通过天线方向图和积累孔径设置等先验信息计算得到,鲁棒性强。
5 试验结果与分析
5.1 仿真结果
为便于分析照度不均衡对成像的影响,并对本文所提方法的效果进行验证,以下仿真了折线航迹条件下步进频率SAR回波信号。具体系统仿真参数如表1所示。其中,假设发射天线方位波束宽度与俯仰波束宽度均为°60,在波束范围内天线为各向均匀辐射源。采用 CIABP算法作为基本成像方法,方位积累角取为°60。
飞行航迹及场景布置如图2所示。载机沿折线以离地100 m的高度飞行,雷达工作在正侧视条带模式下,即天线波束中心方位指向与航迹保持垂直,天线波束中心俯仰指向保持为斜向下°45。
在场景中共设置6个理想点目标,具体参数如表2所示。

表1 系统仿真参数
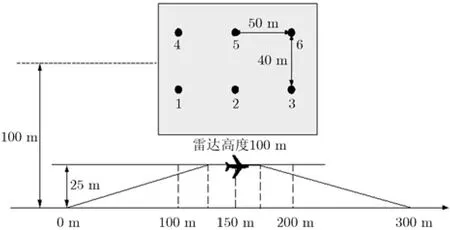
图2 航迹及场景布置
其中目标1, 2, 3幅度相同,目的是验证照度造成的增益不均衡现象;目标4, 5, 6幅度不同,目的是为便于与传统基于单帧图像的图像均衡方法进行比较,突出本文所提均衡方法在恢复图像真实散射强度方面的优势。
受恒定积累角影响,距离向远端的照度明显高于距离向近端的照度;受姿态抖动的影响,照度方位分布呈现中间弱、两侧强的趋势,如图3所示。总体上看,照度分布与航迹位置和姿态变化的走势一致。受照度分布不均衡的影响,CIABP成像结果中目标2的幅度明显弱于位于两侧的目标1和目标3(如图4所示),目标5幅度也低于其真实散射强度。

表2 目标仿真参数

图3 照度分布图

图4 CIABP成像结果
最常用的单帧图像均衡方法为预白化。假设某像素点灰度值为x,以该像素点为中心的参考窗口内计算灰度均值μ和方差σ,将该像素点的灰度值修改为(x-μ)/σ。文中参考窗口尺寸取为40个像素点。如图5所示,单帧图像均衡方法虽然能使目标的幅度趋于一致,但也将目标的旁瓣大幅抬高,破坏了图像的真实散射特征。基于照度信息的图像均衡恢复了目标2的真实散射强度,目标1和目标2的幅度基本相同(图6),同时目标5的幅度也有所提高。
下文进一步对文中所提算法的效果进行定量分析。如表3所示,受照度不均衡的影响,CIABP成像结果幅度已不能真实反映目标的散射特征,表现为:散射强度相同的目标的 CIABP成像结果幅度并不相同,最大有1.731 dB的差别;散射强度不同的目标之间的相对幅度关系被破坏,最大达到3.9174 dB。基于单帧图像的图像均衡使不同散射强度目标的幅度趋于一致,抹煞了目标幅度之间的相对关系。照度补偿准确恢复了不同目标散射强度之间的相对关系,恢复误差在0.1 dB以内。
5.2 实测数据处理结果
国防科技大学在 2010年研制了无人飞艇载UWB SAR系统,采用步进频率信号体制,距离和方位分辨率达到0.1 m。天线波束宽,积累孔径长,运动误差对成像质量影响较大[10]。而无人飞艇在飞行过程中,受地表气流作用,常常存在剧烈的位置和姿态变化。图7为无人飞艇某次飞行的位置和姿态数据。可见除了位置的大幅抖动,姿态抖动剧烈。其中,偏航角抖动范围很大达到了°35左右,俯仰角和横滚角也有°15左右的抖动。

图5 基于单帧图像的图像均衡结果
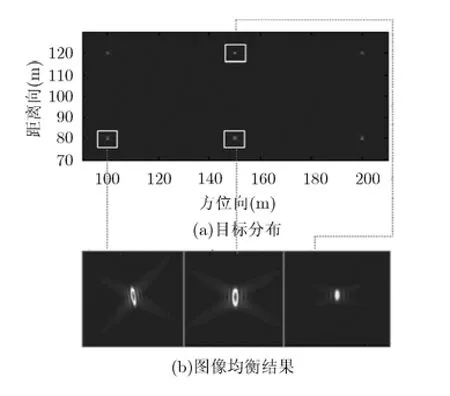
图6 基于照度信息的图像均衡结果

表3 基于照度信息图像均衡效果定量分析

图7 无人飞艇某次飞行的位置及姿态
由于预白化方法会明显改变场景的幅度分布,不利于图像的直观显示,因此该方法在以改善视觉效果为主要目的的实测数据成像处理中的应用并不多,更多的是将其作为检测前的预处理步骤。在实际应用中,通常在斜距向上乘以2t以补偿电磁波传播引起的R2衰减,达到图像均衡的目的[6]。因此,本文将依据2
r关系进行辐射校正的方法与该文所提算法进行比较分析。
CIABP成像结果存在明显的距离向近端幅度强、距离向远端幅度弱的现象(图 8(a))。在斜距向上依据2
r关系进行辐射校正的效果并不理想,未达到突出图像细节的目的(图 8(b))。可见在存在剧烈的姿态抖动时,该辐射校正方法并不适用。图 8(c)给出的成像区域的照度分布图进一步印证了存在姿态抖动的条件下,照度分布不均衡现象严重。正是照度不均衡导致依据2r关系进行辐射校正方法的失效。经过基于照度的SAR图像均衡后图像亮度变均匀,图像细节更加突出(图8(d))。
为定量分析文中所提算法的有效性,选取场景中的两个棱长为0.3 m的三面角A与三面角B以及反坦克雷C进行比较。理论上目标A与目标B的成像幅度应大致相同,而远强于地雷目标C的幅度。如表4所示,CIABP成像结果中距离向近端的三面角目标B幅度强、距离向远端的三面角目标A幅度弱,以r2关系辐射校正后效果并不理想,A目标和B目标的幅度差别反而有所增加,达到了3.64 dB,说明该辐射校正方法并不具备普适性。经过本文提出的基于照度的SAR图像均衡后,A目标,B目标幅度差别仅为0.11 dB。而目标C的幅度远弱于三面角A与三面角B,这与实际情况相符。
6 结束语
在无人机载SAR应用中,载机常常存在剧烈的位置和姿态抖动,现有的运动补偿算法往往针对位置抖动进行补偿,忽略了姿态变化对成像的影响。本文分析发现,位置和姿态变化能够导致雷达照射能量不均匀,进而引起图像不均衡。传统图像均衡方法将照射能量不均匀造成的图像增益不均衡与目标散射特性一起校正,混淆了两者之间的区别,其均衡结果无法反映真实的目标散射特征。为此,本文提出了照度的概念以表征雷达单位面积上的照射能量,给出了照度的计算公式,并推导得到SAR图像幅度可视为于目标后向散射幅度与照度的乘积,此基础上提出一种基于照度信息的图像均衡方法。仿真和实测数据处理结果表明,该方法能够准确还原图像真实散射强度信息,且消除载机位置和姿态误差引起的图像增益不均衡现象。

表4 实测数据基于照度信息图像均衡效果定量分析

图8 实测数据基于照度的图像均衡结果
[1]王岩飞, 徐向辉, 刘畅, 等. 用于地面微波特性测量的飞艇SAR系统[J]. 电子与信息学报, 2010, 32(1): 28-31.
Wang Yan-fei, Xu Xiang-hui, Liu Chang,et al.. Airship SAR system for precision microwave measurement of ground targets[J].Journal of Electronics&Information Technology,2010, 32(1): 28-31.
[2]Frey O, Magnard C, Rüegg M,et al.. Focusing SAR data acquired from non-linear sensor trajectories[C]. Proceedings of 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, 2008: 415-418.
[3]Frey O, Magnard C, Rüegg M,et al.. Non-linear SAR data processing by time-domain back-projection[J].IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(6):1844-1858.
[4]李建阳, 常文革, 黎向阳. 二阶运动补偿对低频超宽带 SAR视线误差补偿的影响[J]. 电子与信息学报, 2011, 33(4):792-797.
Li Jian-yang, Chang Wen-ge, and Li Xiang-yang.Second-order motion compensation effects on light of sight error compensation in low-frequency ultra wide-band SAR[J].Journal of Electronics&Information Technology, 2011, 33(4):792-797.
[5]麻丽香, 程黎, 唐禹. 一种高分辨率聚束 SAR 运动补偿算法研究[J]. 电子与信息学报, 2010, 32(3): 599-603.
Ma Li-xiang, Cheng Li, and Tang Yu. Research on motion compensation algorithm for high resolution spotlight SAR[J].Journal of Electronics&Information Technology, 2010, 32(3):599-603.
[6]Rau R and Mcclellan J H. Analytic models and postprocessing techniques for UWB SAR[J].IEEE Transactions on Aerospace and Electronic Systems, 2000,36(4): 1058-1074.
[7]Zou Kun and Liang Dian-nong. Radiometric correction and calibration for low frequency UWB SAR system[C].Proceedings of 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea , 2005: 25-29.
[8]肖莉. 基于Rail-GPSAR 实测数据的超宽带SAR浅埋目标检测技术研究[D]. [硕士论文], 国防科技大学, 2006.
Xiao Li. A research on the ultra-wide band SAR detection techniques of shallow buried target[D]. [Master dissertation],National University of Defence Technolgy, 2006.
[9]Wang T P, Sjahputera O, Keller J M,et al.. Feature analysis for forward looking landmine detection using GPR[C].Proceedings of SPIE, Bellingham, 2005, 5794: 1233-1244.
[10]Song Q, Zhang H H, Liang F L,et al.. Results from an airship-mounted ultra-wideband synthetic aperture radar for penetrating surveillance[C]. Proceedings of 2011 Asia-Pacific Conference on Synthetic Apture Radar, Seoul, Korea,September 26-30, 2011: 194-197.
