工程机械远程故障监诊系统
2012-07-25张长胜
曹 涌,张长胜
(昆明理工大学信息工程与自动化学院自动化系,昆明650500)
1 引言
随着我国现代化建设的迅速发展,特别是基础设施建设方面的发展,工程机械设备在其中起着不可替代的作用,各种工程机械设备甚至是夜以继日的运行。当今的工程机械设备其性能、速度以及复杂程度都在不断提高,随之而来的可靠性问题也日渐突出。工程机械设备往往工作在一些自然环境恶劣的场所,通信、交通等都不够便利,如若发生故障其维修难度也随之加大,需要更换的一些零部件在较短时间内都难以及时送达,造成了工期的延误,从而可能给整个工程造成经济上的巨大损失。基于此,及时对机械设备各部件进行监测从而预测设备可能发生的故障变的尤为重要。而传统的设备监测维修方式多以人工方式凭借积累的经验进行,需要耗费大量的人力资源,且不可能面面俱到,准确度不够高。为了保证工程机械设备在恶劣的工作环境下能够正常运行,需要建立一种能够及时监测机械设备各部件的运行状态从而预测其发生故障的可能性的机制,在第一时间解决可能出现的故障,以避免给整个工程带来经济上的损失。本系统的设计、开发能够很好的满足上述需求,给商家和用户带来了很多便利。
2 总体设计
系统总体由三部分组成,设备制造商监诊服务器、设备出租商监诊服务器和车载终端。各部分功能描述如下:
(1)设备制造商监诊服务器
设备制造商参与了整个设备的生产过程,对设备各部件有着丰富的维修技术和维修经验,在设备的售后维护当中起着举足轻重的作用。设备制造商可以通过远程监诊服务器直接监视设备的运行状态,也可以在最大限度上对设备出租商进行技术支持,能够更加准确的预测设备在运行过程中可能出现的故障。
在设备使用者和设备出租商无法对设备进行自主维修时,设备制造商能够通过远程交互的方式对其进行指导。
(2)设备出租商监诊服务器
设备出租商通过服务器能够及时的关注设备的运行状态,通过对各种参数的分析,在设备使用者经验不足的情况下设备出租商能够及时为设备使用者提供相关技术支持,通知其设备可能出现的问题,并指导其对设备进行维修或暂停对设备的使用以免造成更大的损失,如有必要设备出租商可以提前将需要更换的设备零部件送往设备工作现场,以缩短维修时间。
(3)车载终端
通过车载终端设备使用者可以对设备的运行状态进行实时监测,通过显示的各种数据,凭借自身经验,预测设备有可能出现的故障,并对相应部件进行检修,以使设备能够正常运行。
对于设备确实存在的故障,在现场工作人员无法维修的情况下,可以及时向设备出租商进行汇报,以此得到维修专家的远程指导。工程机械设备远程故障监诊系统的整体结构模型如图1。

图1 系统整体结构模型
3 硬件设计
3.1 车载终端硬件设计
车载终端以基于ARM9的嵌入式处理器S3C2440作为硬件开发平台。S3C2440被广泛应用于工业控制、移动通信、PDA、路由器等领域,其主频为400MHz,总线频率为133MHz,芯片中集成了下列模块:16KB指令 Cache、16KB数据 Cache、MMU、外部存储器控制器、LCD控制器、NAND Flash控制器、4通道PWM定时器和1个内部定时器、168脚通用GPIO、实时时钟、8通道10bit的AD和触摸屏接口、标准20pin JTAG调试接口等。存储器方面采用256MB Nand-Flash用于数据存储和64MB SDRAM用于程序运行,屏幕采用3.5寸TFT触摸屏。其硬件结构如图2所示。
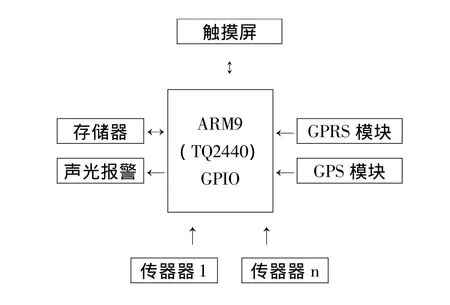
图2 车载终端硬件结构
其主要负责机械设备各部件的数据采集和预处理,通过GPRS模块将数据发送到远程服务器,通过GPS模块将设备的地理位置信息发送到远程服务器(包括设备制造商监诊服务器和设备出租商监诊服务器)。
3.2 设备监诊服务器端硬件设计
设备监诊服务器包括设备制造商监诊服务器和设备出租商监诊服务器,两者的硬件结构完全相同,远程监诊体系的各个构成部分之间的连接方式分为专线连接、电话线连接和互联网连接3种。专线连接方式具有传递速度快,连接质量高,信号时延小,可靠性高等优点,但成本高,性价比低。电话线连接方式用调制解调器通过现有电话线拨号连接,采用文件传输的方式进行现场数据与远程诊断中心之间的联系,这种方式所采用的设备较为简单,费用低,较为容易实现,对现有通讯手段较为落后的地区比较实用,且容易普及。但传输速率受电话线路的限制相对较低,而且由于传输线路不稳定将造成传输数据的不稳定,有较大的时延,有时还可能出现传输过程中的断线,所以这种方式并不理想。
远程监诊服务器必须具有固定的IP地址(向互联网服务提供商获取),便于接收车载终端通过GPRS网络发送的数据。
4 软件设计
4.1 车载终端软件设计
车载终端软件系统引入嵌入式Linux2.6操作系统,以Qt/Embedded为开发工具,整个软件都在嵌入式Linux2.6的管理下运行。程序设计有别于传统顺序结构的设计思想,程序虽然有主程序,但主程序并不完成某种特定的功能,而只是对一些软硬件、实时变量、全局变量以及操作系统进行初始化,并且建立一个任务,然后启动操作系统而已;最后系统就把CPU控制权交给操作系统,永远不会返回主程序。通过操作系统调度,实时显示机械设备各部件传感器采集到的信号,并对其进行分析判断,若超过所设定的阀值则发出声光报警信号,实现部件的检测功能,与此同时系统能够定时地通过GPRS模块将采集到的数据经无线网络发送到远程服务器,而GPS模块也能将设备的地理位置信息通过通信网络传给远程服务器。
(1)数据采集程序设计
系统上电复位后,首先调用系统初始化子程序对数据采集装置的各个模块进行重新设置,使系统进入工作状态。系统利用定时器产生中断,结束微控制器的低功耗状态。系统实时时钟(RTC)中断然后转入中断处理子程序,唤醒微控制器。系统调用数据采集程序、数字滤波和存储子程序(当超出阀值时还要调用紧急处理子程序,将此时、此部件的数据以闪烁的方式显示在车载终端触摸屏上发出声光报警)。软件主要包括以下几个部分:采集装置初始化程序、实时时钟设置程序、传感器数据定时采集程序、数据无线传输程序、数据显示、报警程序。
(2)GUI界面设计
该模块用于车载终端与操作人员交互,传感器采集到的信息经过A/D转换以后都以数字的形式显示在这个界面上,操作人员能够很直观的对设备信息进行观测。本设计采用的Qt/Embedded界面设计功能强大,能够开发良好的GUI界面。
4.2 服务器端软件设计
在服务器端采用Qt Creator进行软件开发,开发过程采用Qt独有的信号、槽机制进行编程。设备制造商监诊服务器和设备出租商监诊服务器的开发思路大体相同,仅在数据库的设计方面有所区别,包含的数据信息不同。
工程机械远程故障监诊系统服务器端主要由数据预处理程序、参数数据库、多传感器信息融合算法、故障树决策、现场专家等组成。
远程监诊服务器首先对从传感器上采集过来的信号经过预处理,然后送入参数数据库,采用多传感器信息融合算法将来自不同传感器的信息进行融合,获取预测所需的初始数据,与故障数据库中的信息进行匹配,建立故障树模型,由专家进一步分析故障部位和故障原因,待确认后将信息传递给一线人员。
5 关键技术
5.1 车载终端涉及的关键技术
车载终端涉及的关键技术主要是嵌入式操作系统的移植,具体有Bootloader移植,文件系统移植和Linux内核的移植,只有整个平台搭建好以后才能实现GPRS通信。
其次是应用程序编写,即Qt编译环境的建立,程序首先要在x86体系结构的主机上调试通过后才可将其移植到ARM体系结构的开发板上,即Qt需要编译两次来满足程序的编写需求。
5.2 服务器端涉及的关键技术
服务器端涉及到的关键技术有多传感器信息融合技术和故障树分析法。
(1)多传感器信息融合技术
多传感器信息融合是利用计算机技术对按时序获得的若干传感器的观测信息,以及数据库和知识库的信息,在一定准则下加以自动汇集、相关、分析、综合为一种表示形式,以完成所需要的估计和决策任务所进行的信息处理过程。
无论在结构还是在信息传递上,现代工程机械由于其结构复杂所以其发生故障的因果关系也比较复杂且故障点隐蔽,同样的故障其原因有多种。多传感器信息融合技术可以解决工程机械故障诊断中信息量不足、不完善而导致故障误判、遗漏的问题,一般通过信息融合,可增加置信度,提高检测系统的可靠性。
(2)故障树分析法(FTA)
故障树分析法(FTA)是指系统利用故障树模型对不同对象进行建模。故障树模型是一种基于研究对象结构、功能特征的行为模型,是一种定性的因果模型,以系统最不希望事件为顶事件,以可能导致顶事件发生的其它事件为中间事件和底事件,并用逻辑门表示事件之间联系的一种倒树状结构。设计时由专家根据各个被诊断对象的构造及功能逻辑关系,构造出系统的逻辑故障树,存放于模型数据库中,供故障诊断模块使用。
根据故障树可找出故障中所有导致顶事件发生的最小割集,也就是系统全部可能的失效状态,全部最小割集的集合又称为系统的故障谱。以故障树为手段,通过分析故障谱,了解系统发生故障的各种途径及原因,找出系统的薄弱环节,可以有效地提高系统的可靠性。故障树适合系统构成层次分明、子系统间关系明确简单的系统,因此本故障诊断系统采用故障树方法进行建模。
6 结束语
系统根据实际需要给出了工程机械设备远程监诊系统的总体设计,考虑到工程机械的工作环境限制,采用无线数据传输,克服了使用有线传输带来的不便,降低了整个系统的硬件成本。系统通过车载终端和服务器能够很好地为工程机械可能发生的故障做出预测,在很大程度上提高了工程机械的使用寿命。
[1] 刘同明,夏祖勋,解洪成.数据融合技术及其应用[M].北京:国防工业出版社,1998.
[2] 何勇,李增芳.智能化故障诊断技术的研究与应用[J].浙江大学学报,2003,29(2):119-124.
[3] 廉晓阳,杨朴.工程机械远程监控系统的应用分析[J].公路,2004,48(4):148-151.
[4] 陈玮,胡光锐,汪亚平.飞行器故障诊断专家系统中的知识获取机制[J].上海交通大学学报,2000,34(6):845-847.
[5] 周立功.ARM嵌入式系统软件开发实例[M].北京:北京航空航天大学出版社,2005.
[6] 丁林松,黄丽琴.Qt4图形设计与嵌入式开发[M].北京:人民邮电出版社,2009.
[7] 李朝青.单片机原理及接口技术[M].北京:北京航空航天大学出版社,1994.
[8] 赵新民.智能仪器设计基础[M].哈尔滨.哈尔滨工业大学出版社,1999.
[9] 李志全.智能仪表设计原理及其应用[M].北京:国防工业出版社,1998.
[10] 俊普等.智能控制[M].合肥:中国科学技术大学出版社,1996.
