推土机保障虚拟训练系统的设计与实现
2012-07-25张云仲苏凡囤
张 琦,张云仲,苏凡囤,袁 博
(解放军理工大学 工程兵工程学院,江苏 南京 210007)
某型推土机以其机动性强、自动化程度高、响应迅速等特点,在完成多样化军事保障任务以及抢险救援、事故勘察等非战争军事行动中发挥着重要作用.此类装备结构复杂,实施良好的技术保障是提高装备工作可靠性的关键.目前,该装备的维修训练普遍以物理样机为训练对象,结合教师讲解、二维多媒体演示等辅助手段进行,此类训练方法实施范围有限,人力、财力、装备资源及时间消耗大.
虚拟现实技术的日益成熟为上述问题提供了很好的解决办法.通过对保障过程进行仿真,人可以沉浸在虚拟环境中,加深了人们对装备保障的准确理解和直观感受.这种训练方式具有安全、经济、可控、无风险、不受气候条件和空间限制等优势.
1 保障虚拟训练系统的组成
在充分分析用户需求的基础上,设计开发了数字样机、虚拟训练环境、保障过程仿真、保障知识库、考核评价方法和系统管理等内容,根据系统所要实现的功能构建某型推土机保障虚拟训练系统框架.
1.1 需求分析
虚拟保障依托虚拟场景和数字样机技术来实现人机交互,虽然它与实际保障在过程和行为上具有一致性,但在操作方法和实现手段上都与实际维修过程存在着差别.为保证与真实装备保障过程的一致性和交互过程的真实性和灵活性,虚拟训练系统应满足如表1所示的几方面要求.

表1 系统需求分析Tab.1 System demand analysis
1.2 系统功能与总体框架
1.2.1 系统功能结构
在开发系统平台前,参考对系统的需求分析,准确描述系统是十分必要的.而描述系统最直观的方式是设计系统功能结构,通过对功能的设计来构建系统总体框架.考虑到某型工程装备的复杂性、系统面向对象的多样性、训练系统的通用性以及使用对象认知和操作水平的差异,系统功能设计应主要体现以下几个方面,如图1所示.
1.2.2 平台总体框架
在虚拟环境下,模型的建立和维修过程的实现技术难度大,因此虚拟训练所涵盖的内容超越真实保养的内容范围.依据系统功能模块设计,平台组织框架如图2所示[1],主要包括:① 虚拟样机的建立.利用实体建模技术建立操作对象和虚拟环境模型库,建立零件模型信息、维修工艺和故障诊断专家知识数据库.② 信息获取.对模型、位姿、科目等信息进行获取,为虚拟训练的实现做准备.③ 模拟仿真过程的实施.依据维修内容规划,对虚拟人和维修过程进行模拟仿真,实现人机交互.④ 反馈评价.对位姿、碰撞、控制信息的改变做出响应,使用反馈信息对训练质量进行考核评价,包括知识考核和过程考核[1].
1.3 系统组成
依据交互形式划分,虚拟训练系统可分为桌面式、沉浸式、增强式、分布式等类型.考虑教育机构投入成本等因素,桌面式虚拟训练系统为较好的选择.其投入成本不高,在训练教学领域内应用范围广、推广价值高.高速轮式装备保障虚拟训练系统为桌面式虚拟训练系统,在平台设计上,力求简洁实用,控制台体积小.软件部分使用VR环境开发平台、建模平台和方案实施平台来实现交互信息的输入和输出.硬件平台采用手柄、轨迹球、鼠标等来实现人机交互,并且控制台上备有相应的输入、输出设备通信接口,便于虚拟训练系统的功能扩展,保证虚拟训练系统运行稳定、可靠.系统功能结构采用模块化设计,人机交互界面更加人性化,科目设置具有通用性,便于拓展用于其他装备的保障虚拟训练.系统平台的组成如图3所示.
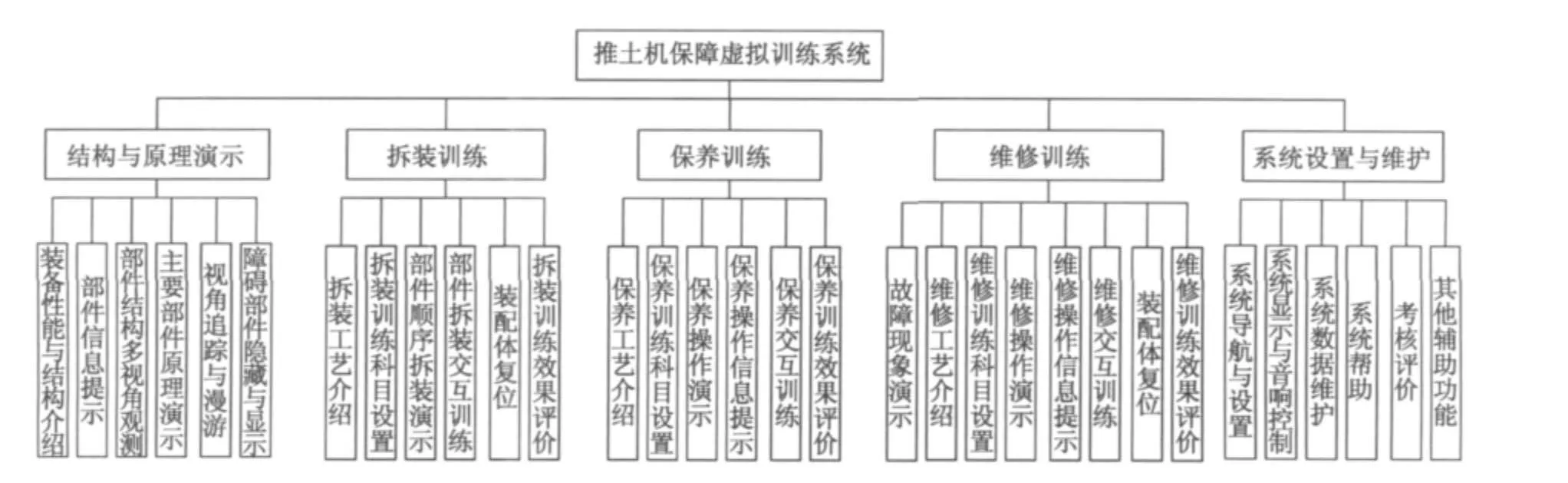
图1 系统功能结构图Fig.1 Structure of the system function

图2 平台组织框架Fig.2 Organization framework of the platform
图3 系统平台组成Fig.3 Composition of the system platform
2 系统设计
2.1 训练科目模块化体系构建
在训练科目规划上,采用模块化设计思想,在主程序框架下,设置各个训练主模块及子模块,通过主程序对整个训练过程进行管理和控制.不同层次的用户可以有针对性地选择训练内容.系统将训练教学模块划分为4个模块:基础训练、保养训练、拆装训练和维修训练.训练过程中,用户可以通过基础训练了解装备的构造、性能、原理等知识,为之后的维修保养训练打下理论基础.各训练模块相互衔接,且互不干扰,既可连续进行,也可独立完成,训练科目模块化体系的构建如图4所示.
2.2 虚拟样机建立
在虚拟训练系统的开发过程中,模型的精确建立发挥着至关重要的作用.高仿真度的三维模型可以真实再现实验场景、零件外观甚至内部结构,给用户以良好的沉浸感,获得如同甚至超过真实实验环境中的学习感受和体验.
2.2.1 几何建模及优化
几何模型在虚拟维修训练环境中的有效表达是构建整个虚拟维修训练环境的重要因素.为了使装备模型和场景模型更加贴近真实,需要对CAD模型进行二次开发.常用的方法是在多边形建模的基础上对模型进行NURBS(Non-Uniform Rational B-Splines)曲面修改,通过控制点和权因子来灵活地改变形状,从而精确地表示二次规则曲面.

图4 训练科目模块化体系构建Fig.4 Construction of the training course modular system
针对不同的训练目的,对模型也有不同的要求.虚拟训练环境中的对象多数需要进行实体建模,但是如果所有模型都采用实体建模方法表现,则系统的运行负担是非常大的,必须采用模型优化技术对复杂场景进行处理.使用基于单元分割、可见消隐、纹理映射、实例化和LOD(Levels of Detail)等的技术对模型结构、纹理、实体、场景等进行优化[2],可以提高系统运行速度和表现效果.虚拟训练的环境设计流程如图5所示.
2.2.2 训练过程建模
为了保证虚拟训练过程更加真实,需要准确描述训练过程.目前应用比较多的虚拟维修过程规划方法主要有使用UML(Unified Modeling Language)技术[3]和改进的 Petri网技术[4]两种.使用UML对象类图、状态视图、顺序视图等建立训练过程模型,比较明确地表示了整个系统所包含的训练科目和各科目所具有的功能,以及这些训练过程的实现途径.为了突出虚拟训练过程及其训练模式的多样化,在借鉴上述方法的基础上,针对某型工程装备保障训练的特点,提出了面向任务的虚拟训练任务层次规划方法.

图6 维修任务层次规划Fig.6 Hierarchical structure planning of maintenance tasks
根据维修任务性质,可以把维修事件划分为下级层次维修子事件(如图6).例如,对于单个维修事件进行的分类仅是整体上的一个描述,具体的维修训练还要求更细致具体的过程规划.对于系统内的单个维修任务,按其出现的故障现象进行分块处理,每一模块内又根据不同的故障原因,列出维修作业选项,在选择维修作业后进而可以完成一系列维修任务.
2.3 训练过程仿真
维修保养训练是虚拟训练的重要组成部分,需要提供必要的交互手段来实现虚拟人行为、工具动作、装备模型运动等过程,仿真过程需要满足真实性要求,以保证虚拟训练的真实感和沉浸感.
2.3.1 碰撞检测
在工具和零件拾取、虚拟拆卸与装配、虚拟人动作、视角转移过程中,为防止占据不同空间位置的对象之间发生穿越现象,必须在虚拟训练环境中体现真实操作中的碰撞现象,包括碰撞检测及碰撞响应.虚拟训练过程中,运动对象多,工具拾取、零件拆装、虚拟人动作、视角转移等过程发生的碰撞往往同时发生.针对不同的应用目的,对碰撞检测的精确程度也有不同的要求,如在视角转移或工具拾取过程中,只需粗略检测,防止穿越现象发生;在零件拆卸与装配过程中,依据工艺要求,对碰撞检测的精确性要求较高,需要显示碰撞对象、碰撞位置、碰撞时间等信息,进而触发相应的碰撞相应事件,给出诸如文本、声音、图像、色彩变换、振动等反馈信息,使用这些信息指导完成训练任务.
碰撞检测算法在处理包含大量物体的复杂场景时,首先将多数明显不相交的物体对进行快速排除,然后采用体包围盒的方法,再对可能相交的物体对进行进一步检测[5],碰撞检测流程如图7所示.
2.3.2 运动控制方法
为防止运动过程的不确定性,需要用解析法和数值法求解虚拟训练过程中涉及的运动学问题,解析法精度高,且能达到实时效果,但随着自由度增加,运动对象建模也变得更加复杂,数值法通过不断迭代,逐步缩小目标误差,最终求得关节位置的近似解.
为简便设计开发过程,将训练任务进行分解,并将维修动作进行分类,建立基本动作库,形成一系列可重用的基本动作,作为虚拟人动作的基础,根据训练目标对虚拟人动作进行规划,形成完整的动作序列完成训练任务.

图7 碰撞检测流程图Fig.7 Flow chart or the collision detection
3 系统实现
将某型推土机保障虚拟训练系统设计为桌面式虚拟训练系统,在平台设计上,力求简洁实用,控制台体积小.软件平台使用CAD等建模软件建立装备模型及环境模型信息库,使用SQL Server提供数据库开发环境,Visual C++6.0及EON Studio开发虚拟现实训练平台,最大限度地挖掘桌面式虚拟训练系统功能,为用户提供便捷的操作方法.训练科目规划主要包含结构演示规划、工作原理演示规划、虚拟拆装序列规划、拆卸路径规划、保养过程仿真、维修过程仿真等,做到功能全面,使训练质量得到保证.系统控制台及操作界面如图8所示.

图8 系统界面与虚拟环境Fig.8 System interface and the virtual environment
4 结语
某型推土机保障虚拟训练系统的设计开发能有效解决装备训练中面临的时效滞后、技术保障能力不足、资源消耗大等问题,为教学单位、科研单位、维修保障单位提供了一个经济高效的训练手段.系统功能全面,兼顾知识的深度和广度,用户在操作时,能够逐渐掌握装备结构性能、使用方法、工作原理和维修保养手段,对于改善训练效果、提高人才培养、探索新的教学模式具有很大的促进作用,具有较高的经济效益和军事价值.
[1]焦玉民,苏凡囤,张琦,等.基于EON的挖掘机虚拟训练系统[J].中国制造业信息化,2009,38(13):38-42.
JIAO Yumin,SU Fantun,ZHANG Qi,et al.Virtual maintenance of excavator based on EON[J].Manufacture Information Engineering of China,2009,38(13):38-42.
[2]刘佳,刘毅.虚拟维修技术发展综述[J].计算机辅助设计与图形学学报,2009,21(11):1519-1533.
LIU Jia,LIU Yi.A survey of virtual maintenance technology[J].Journal of Computer-Aided Design & Computer Graphics,2009,21(11):1519-1533.
[3]张天辉,刘颖,朱元昌.UML在军用装备虚拟维修训练系统开发中的应用[J].军械工程学院学报,2004,16(1):56-59.
ZHANG Tianhui,LIU Ying,ZHU Yuanchang.Application of UML in the design of virtual maintain-train system[J].Journal of Ordnance Engineering College,2004,16(1):56-59.
[4]蒋双双.一种基于Petri网的虚拟维修过程建模方法[J].系统仿真学报,2007,19(11):2488-2491.
JIANG Shuangshuang.Method of process-modeling in virtual maintenance based on petrinet[J].Journal of System Simulation,2007,19(11):2488-2491.
[5]JIMENEZ P,THOMAS F,TORRAS C.Collision detection:a survey[J].Computers and Graphics,2001,25(2):269-285.
