双余度舵系统中的电流均衡策略研究
2012-07-23戴志勇马冬麒
林 辉,戴志勇,马冬麒
(西北工业大学,陕西西安710129)
0引 言
随着多电飞机和全电飞机技术的迅猛发展,飞机电动舵机代替传统的气压、液压舵机已然是大势所趋。而在航空领域中,舵机的可靠性直接影响着飞机的安全飞行。采用冗余技术,可有效地提高整个舵系统的可靠性。本文设计了一种以双余度无刷直流电动机为舵机本体的双余度舵系统,着重对系统中的电流均衡策略进行了详细的讨论与研究。
1舵系统结构
舵系统由舵系统控制器、舵机本体、减速机构、舵面位置传感器和舵面五部分组成。其机构如图1所示。舵系统由两个独立的28 V功率电源和两个独立的28 V控制电源供电。控制器接收舵面位置给定信号和舵面位置反馈信号,经调理电路调理、输入控制电路的AD端口,经控制算法控制,通过两个独立的驱动主电路,驱动双余度无刷直流电动机的两个余度绕组,经减速机构,电机拖动舵面转动。舵面转过的角度跟随舵面位置给定。其中,电机绕组、霍尔传感器、舵面位置传感器及系统相应的电路采用冗余设计。

图1 舵系统结构
2电流不均衡的原因与后果
在双余度无刷直流电动机中,两套互为余度的定子绕组存在着电流不均衡现象,其原因有以下几种:
(1)器件的差异引起两个余度绕组电流的不一致。
(2)电机绕组本身的电阻、电感不完全相同。
(3)霍尔传感器安装误差引起电机换向提前或滞后。
当舵系统中两套互为余度的绕组电流不均衡时,两套绕组出力大小不一致,将会产生较大的转矩脉动,从而影响整个舵系统的性能。同时,电流大的余度绕组和其对应的功率电路会产生较大的温升,使整个系统发热,降低整个系统的可靠性,大大地缩短舵系统的使用寿命。
3均流策略
为了消除电流不均衡对系统的影响,本文采用了余度绕组电流均衡的控制策略。当系统工作在双余度工作状态时,采用了位置环、速度环和均流环的三闭环控制策略,如图2所示。
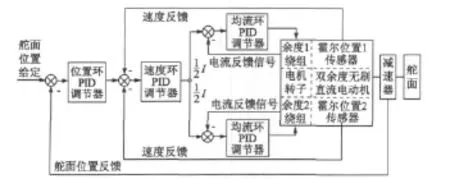
图2 舵系统控制策略
其中,位置环为控制策略的最外环,它根据舵面位置给定和舵面位置反馈的误差调节舵面位置,其性能的好坏和响应速度的快慢直接影响着整个系统的性能。速度环PID调节器控制电机的转速,从而减小系统的超调,优化系统性能。
为了使电机的两个余度绕组实现均流,控制策略采用了均流环。在控制中,将速度环的输出平分输入到两个电流环,通过两个电流环调节,使电机的每个绕组的母线电流跟随速度环输出的一半,从而实现每个余度绕组电流均衡、各承担一半负载的目的。
若某个余度绕组出现故障,将进行故障隔离。其电流均流管理流程图如图3所示。在均流环中,分别采集余度1绕组和余度2绕组的母线电流,当两个余度绕组均正常工作时,两个余度绕组各自的电流环给定分别为转速环输出的一半。此时,余度1绕组、余度2绕组承各担负载的1/2。当余度1绕组故障时,余度1绕组的电流环给定为0,余度2绕组的电流环给定为转速环输出。此时,余度1绕组不出力,余度2绕组承担全部负载。当余度2绕组故障时,余度1绕组的电流环给定为转速环输出,余度2绕组的电流环给定为0。此时,余度1绕组承担全部负载,余度2绕组不出力。
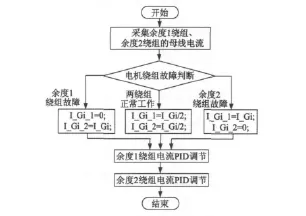
图3 电流均流管理流程图
其中,I_Gi为转速环输出;I_Gi_1为余度1绕组电流环给定;I_Gi_2为余度2绕组电流环给定。
4舵系统仿真模型
为了验证舵系统的均流效果,本文建立了舵系统的仿真模型,并利用MATLAB/Simulink,对舵系统电流均流效果进行了仿真验证。
4.1双余度无刷直流电动机的数学模型
在本系统中,舵机本体为一台双余度无刷直流电动机。电机的定子由两个在空间上互差30°电角度的Y型链接的绕组构成,在电气上两套绕组彼此隔离,在空间上两套绕组存在电磁耦合。两套绕组共用一个永磁体转子。为了建立电机的数学模型,做以下假设:
(1)电机磁路不饱和;
(2)电机定子绕组磁场分布连续均匀,定子绕组和转子磁场分布对称,气隙磁场为方波;
(3)忽略齿槽效应、换向过程、电枢反应等对电机的影响,不考虑电机的涡流损耗和磁滞损耗。则可得电机绕组的电压平衡方程:
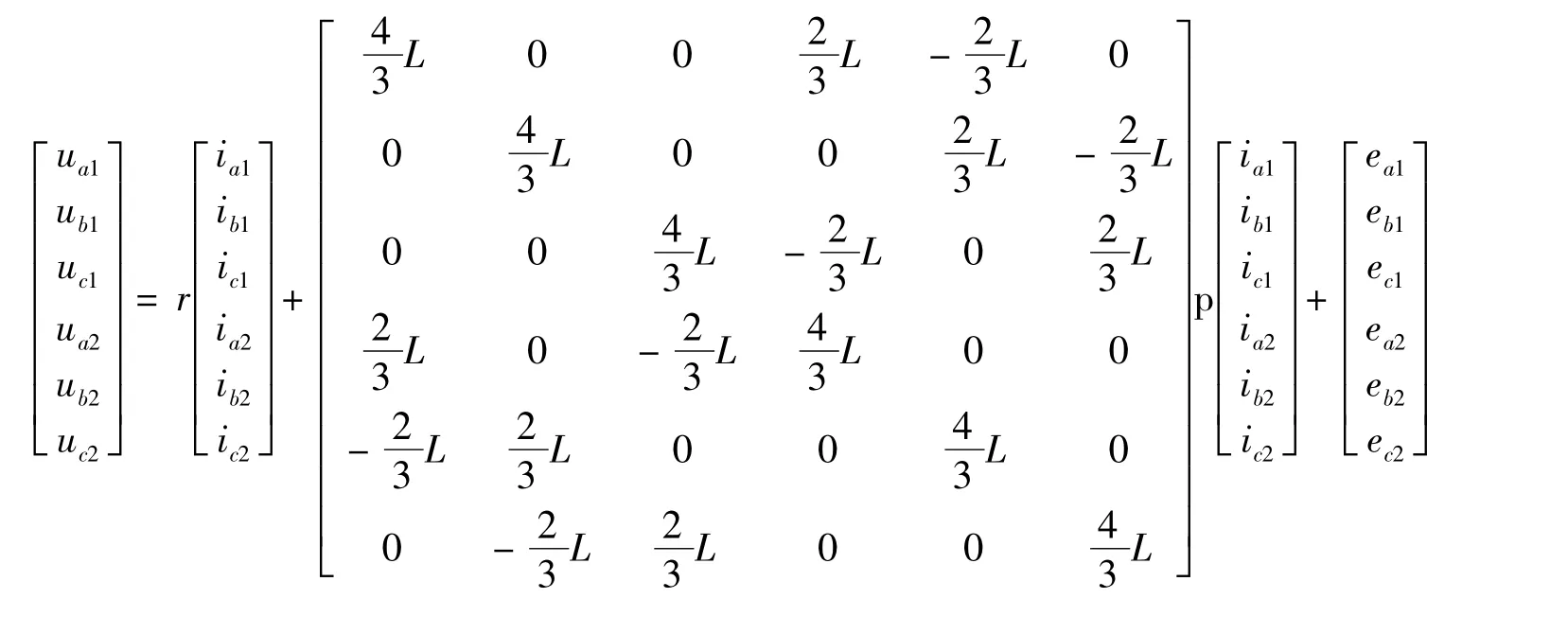
电机的电磁转矩方程:

电机的机械运动方程:

式中:Te为电机的电磁转矩;TL为负载转矩;J为转子的转动惯量;ω为机械角速度;B为粘滞摩擦系数。
根据上述数学模型,在MATLAB/Simulink下,搭建了双余度无刷直流电动机的仿真模型。
4.2舵系统仿真模型
根据上述控制策略,舵系统仿真模型如图4所示。整个舵系统由两个独立的28 V独立电源供电,系统经过位置环、速度环和均流环的控制,产生电机正反转信号和电机占空比控制信号。该信号经PWM生成模块,分别产生两套独立的电机绕组驱动换向信号,经两个独立的逆变器,驱动双余度无刷直流电动机。舵面转过的角度跟随舵机位置给定。
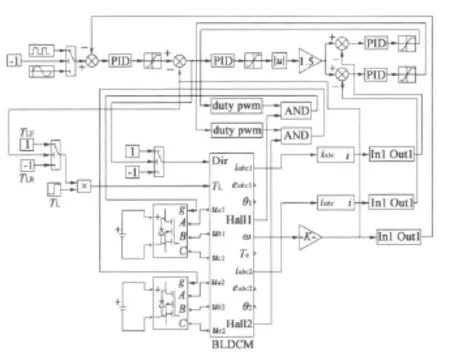
图4 舵系统仿真模型
当舵系统舵面位置给定为正弦波、负载为0.4 N·m时,其仿真波形如图5所示。其中,图5(a)是余度1绕组与余度2绕组母线电流波形。从图中可看出,两个绕组电流基本一致,达到均流效果。图5(b)是位置跟踪波形,系统在控制策略的调节下,位置反馈较好地跟随位置给定。
当舵系统舵面位置给定为方波、负载为0.4 N·m时,其仿真模型如图6所示。其中,图6(a)是余度1绕组与余度2绕组母线电流波形。从图中可看出,两个绕组电流基本一致,达到均流效果。图6(b)是位置跟踪波形,系统在控制策略的调节下,位置反馈较好地跟随位置给定。
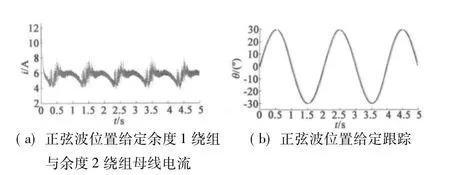
图5 舵面位置给定为正弦波时的仿真波形
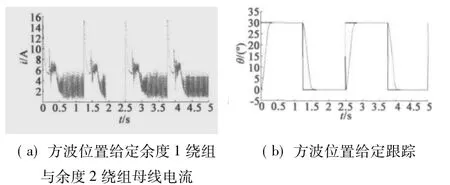
图6 舵面位置给定为方波时的仿真波形
由实验结果知,在均流策略下,双余度无刷直流电动机两套绕组电流基本相同,达到了电流均衡的效果。整个舵系统超调小,稳态精度高,性能优良。
5实验结果
在本系统中,双余度无刷直流电动机的参数如下:额定电压U=28 V;额定转速n=6 000 rad/min;额定功率P=270 W×2。其实物图如图7所示。
图7 舵系统实物图
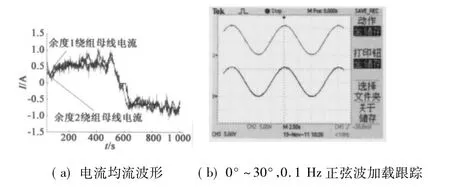
图8 实验结果
实验结果如图8所示。其中,图8(a)是双余度无刷直流电动机均流环的实际测量波形。整个电机跟踪正转1 A~反转1.5 A的电流方波给定。经过电流均流策略,两个余度电流基本一致,出力相同。图8(b)是电机在加载40 N·m情况下,跟踪0°~30°、0.1 Hz正弦波位置给定的实际测量波形,其中0~10 V表示0°~30°位置信号,波形2是舵机位置给定,波形3是舵机位置反馈。
由实验结果可知,在舵系统在均流策略的控制下,电机两个余度绕组电流基本一致,实现了余度电流均衡的目的。整个舵系统稳态精度高,性能优良。
6结 语
本文以双余度舵系统为研究背景,详细设计了基于双余度无刷直流舵机的位置环、速度环和均流环的控制策略,着重讨论了双余度绕组中电流均衡控制策略。建立了双余度无刷直流电动机和舵机系统的仿真模型。利用MATLAB/Simulink,对舵系统进行了仿真验证。仿真结果和实验结果表明,绕组均流控制策略设计合理,实现了双余度绕组间的电流均衡。从而提高了整个系统的性能和可靠性。整个舵系统超调小、稳态精度高、性能优良。
[1] Li Rong,Liu Weiguo,Ma Ruiqing,et al.Research on current balance in dual-redundancy BLDCM servo system[J].Transactions of China Electrtechnical Society,2005,20(9):77-81.
[2] Jensen S C.Flight test experience with an electromechanicalactuator on the F-18 system research aircraft[C]//Conf DASC'19th.Philadelphia,2000,1:2E3-1 ~2E3-10.
[3] Ma Ruiqing,Liu Weiguo,Luo Guangzhao,et al.The balanced current control of dual-redundancy permanent magnetic brushless DC Motor[C]//Proceedings of the Eighth International Conference on Electrical Machines and Systems.2005:475-479.
[4] 张海涛.高精度双余度舵机伺服系统研究[D].西安:西北工业大学,2007.
[5] 杨永亮.双余度无刷直流电机控制技术研究[D].西安:西北工业大学,2007.
[6] Pillay P,Krislman R.Modeling,simulation,and analysis of permanent-magnet motor drives,Part11:The brushless DC motor drive[J].IEEE Trans.On Industry APP lieations,1989,25(2):274-279.
