基于智能PI的永磁同步电动机近似最大转矩电流比控制
2012-07-23张伦健陈利萍
张伦健,陈利萍
(中国矿业大学,江苏徐州221008)
0引 言
由于永磁同步电动机具有体积小、功率密度高、效率和功率因数高等优点,其调速系统越来越多地应用于各种工业场合。目前永磁同步电机电流矢量控制方法有id=0控制、UPF控制、恒磁链控制、最大转矩电流比(以下简称MTPA)控制、弱磁控制及最大输出功率控制等,针对一类永磁同步电动机d、q轴电感不等特性,MTPA控制在相同电流下可输出更大的转矩,因而在系统容量相同的情况下相对id=0控制可显著提高系统动态性能[1]。但MTPA控制时的转矩电流关系非线性,实际应用中难以实时对方程进行求解。文献[4]通过离线计算出电磁转矩对应d、q轴电流关系,再用查表的方法查得转矩对应电流,这样可提高运算速度,但会占用大量存储资源。本文在永磁同步电动机数学模型及MTPA控制理论基础上,通过优化算法研究了一种适用于工程的近似MTPA控制,并将智能PI调节器引入所研究系统。文中对传统PI与智能PI调节下的MTPA及近似MTPA控制进行比较,仿真结果验证近似MTPA控制的正确性与可行性,同时智能PI控制下的系统的动态性能优越。
1永磁同步电动机数学模型及MTPA控制
1.1永磁同步电动机数学模型
将d轴定向于永磁同步电机转子磁链方向,可得dq轴系下PMSM电压、磁链、转矩与运动平衡方程。定子电压方程:

定子磁链方程:

电磁转矩方程:

运动平衡方程:

式中:ud、uq为 d、q 轴电压;id、iq为 d、q 轴电流;R1为定子相电阻;Ld、Lq为dq轴电枢电感;ψf为转子磁链;ψd、ψq为 d、q轴磁链;p为电机极对数;ω 为转子旋转电角速度;p为微分算子;Te为电磁转矩;B为阻力系数;J为转动惯量[2-3]。
1.2永磁同步电动机MTPA控制
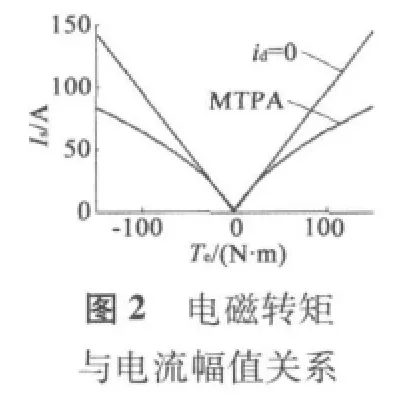
永磁同步电动机id=0控制是将定子电流矢量定向于q轴,使得Is=iq,电磁转矩中的磁阻转矩分量被控制为零,因此在相同的定子电流下id=0控制时的转矩非最大[1,4]。为使磁阻转矩为驱动转矩,可控制定子电流矢量超前q轴以实现MTPA控制,MTPA控制系统原理图如图1所示。
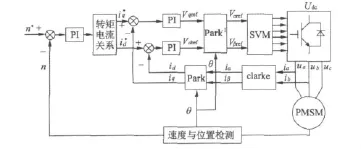
图1 永磁同步电动机MTPA控制原理图
永磁同步电动机定子电流幅值:

为了实现MTPA控制,系统等效为求满足式(5)的转矩极大值问题[3]。作拉格朗日函数L:

式中:λ为拉格朗日算子。
将式(6)分别对id、iq及λ求偏导数并令其为零,得到:
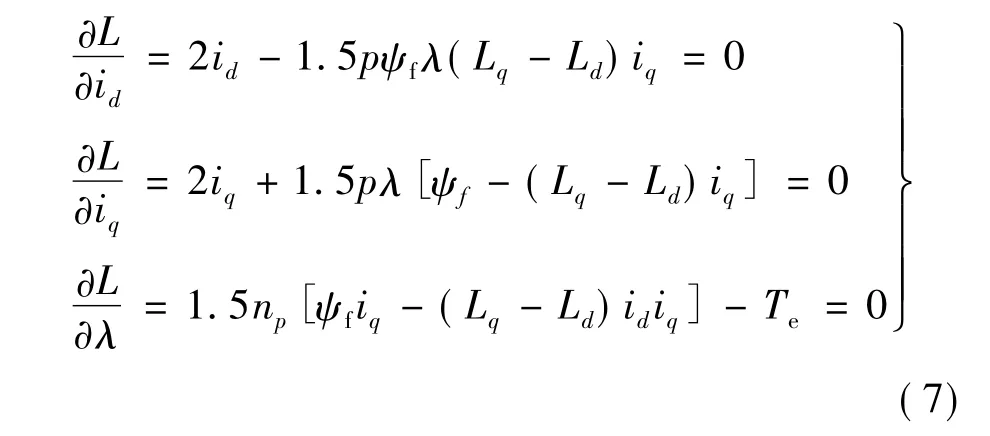
通过求解式(7)可以得出转矩与d、q轴电流之间及其与电磁转矩的关系[3],式中数据详见表1。系统在id=0与MTPA控制下电磁转矩与电流矢量幅值关系如图2所示,MTPA控制下的电磁转矩与d、q轴电流关系如图3所示。
2永磁同步电动机近似MTPA控制
实际应用永磁同步电动机MTPA控制可采用离线计算电磁转矩与电流的对应关系,系统实时查表运行,但该方法会占用大量存储单元[4]。为了更适用于工程实际,本文研究了一种近似MTPA控制,通过算法优化将d、q轴电流id、iq与电磁转矩关系线性化[1]。
设采用MTPA控制时id、iq与电磁转矩的关系:

将式(8)代入式(3)可得:

由于 ξ1(η)与 ξ2(η)均非线性,为便于计算,采用近似线性函数表示,令:

式中:η为转速调节器输出。将式(10)代入式(3)得:

电机的定子电流幅值:

定子电流的幅值正比于速度调节器的输出,但电磁转矩与定子电流为非线性关系。为求得定子电流下的最大转矩,需选择合适的k1、k2。令

由式(11)和式(12),若 Te>0,则:

由式(13)、式(14)可得:


为使J(ρ)最大,将J(ρ)对k进行求偏导,并令偏导数为零,得:

对上式进行化简并令:

由Newton-Raphson迭代原理,k的迭代解:
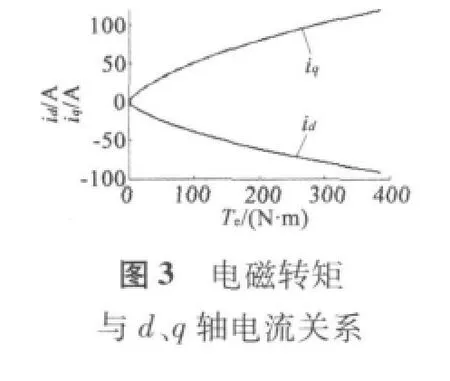
当 ρ=15 A、Ld=4.5 mH、Lq=8.5 mH、ψf=0.175 Wb、p=4 时,利用迭代式(19)解得 k==0.213 4,由可解得 k1=0.208 7,k2=0.978 0。图4为id=0、MTPA及近似MTPA控制时的转矩电流关系。由图可知,近似MTPA与MTPA控制时的转矩电流关系曲线几乎重合,说明两者的控制效果非常接近。
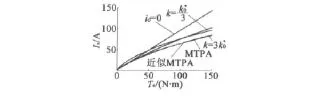
图4 不同情况下的转矩电流关系
3智能PI调节器
3.1智能PI调节器原理
传统PI调节器的参数确定后不再改变,难以适应系统的部分复杂工作状态[6]。偏差、偏差的积分以及偏差的微分分别表示系统的现在、过去及将来的三种状态,若合理地利用以上三种信息,则可构成一种动态改变结构及参数的智能PI调节器以快速消除偏差,减小或消除超调,使系统的动态性能得以提升[2,5]。
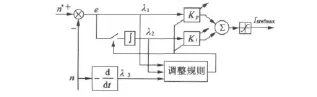
图5 智能PI调节器结构图
3.2参数调整规则
智能PI调节器根据偏差的大小进行参数实时调整,有以下两种情形:
(2)当偏差范围较小(|e|≤ξ)时,需及时调整Kp、Ki,以避免过调,令 Kp≥0,Ki≥0。小范围偏差时的调整规则可分为以下三种情况[5-7]。
(a) 当 λ1λ3<0(λ1>0、λ3<0或 λ1<0、λ3>0)时,偏差趋于零,需减小比例部分(Kp)的作用,且Kp的衰减速度与偏差接近于零的速度成正比。其中λ1>0、λ2>0时积分作用可产生加速转矩,减小偏差;λ1<0、λ2<0时积分作用可产生制动转矩,同样减小偏差。反之,λ1>0、λ2<0时积分作用可产生制动转矩,增加偏差;λ1<0、λ2>0时积分作用可产生加速转矩,同样增大偏差。综上,λ1λ2>0时需增大 Ki,λ1λ2<0时需减小 Ki。可得调整规则:

式中:np1与ni分别为比例系数Kp及积分系数Ki的调整速率。
(b) 当 λ1λ3>0(λ1>0、λ3>0 或 λ1<0、λ3<0)时,偏差|e|增大,Kp需以较快的速度增大,使λ3与λ1同号,偏差|e|越大,Kp增大越快,Ki的调整规则与λ1λ3<0相同。可得调整规则:

式中:np2为比例系数Kp的调整速率。
(c) 当 λ1λ3=0,即 λ1=0 或 λ3=0 时,采用保持Kp、Ki不变的方式。
4系统仿真
基于MATLAB建立仿真模型,电机主要技术数据设置如表1所示。分别对传统PI与智能PI调节下MTPA控制及近似MTPA控制进行仿真分析。系统起动负载转矩为7 N·m,0.15 s负载转矩突增到14 N·m,给定转速n*=700 r/min。系统仿真波形如图6~图8所示。
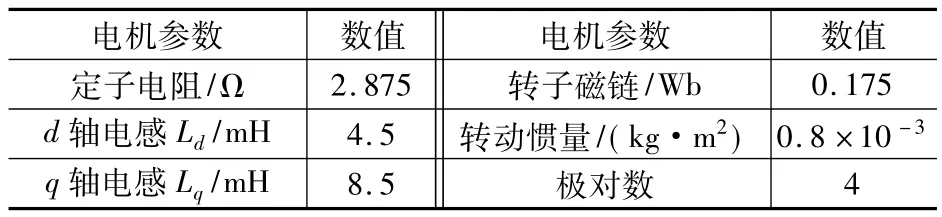
表1 PMSM主要技术数据


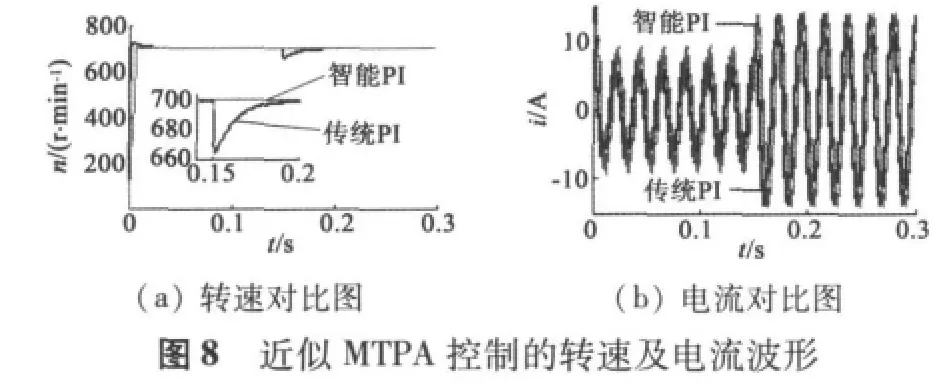
图6为传统PI调节的转矩电流比及电流对比图。由图6(a)可知,负载突增时id=0控制下的转矩电流比值不变,即转矩电流呈线性关系,而MTPA控制下的转矩电流比值随着负载转矩的增大而上升,转矩电流呈非线性关系,且负载转矩越大,转矩电流比相对id=0控制亦越大,MTPA控制下的定子电流幅值略小于id=0控制时的定子电流。由图6(b)可知,MTPA与近似MTPA控制的转矩电流比及电流对比波形非常接近,说明近似MTPA控制在工程上可取代MTPA控制。
图7为传统PI与智能PI调节下MTPA及近似MTPA转速波形。由图7(a)、图7(b),传统PI调节下两者转速响应曲线大致相同,转速差波形如图7(e)所示,但在0.15 s负载转矩载突增时系统动态性能较差,存在约为40 r/min的明显速降,且恢复时间较长,约为0.05 s;由图7(c)、图7(d),智能PI调节下两者的转速响应曲线同样大致相同,转速差波形如图7(f)所示,负载突增时系统的动态性能较传统PI调节有较大改善,通过局部放大图可见,速降降低至约8 r/min,恢复时间约减小到0.000 8 s,整体波形看不出明显的速降;图7(e)、图7(f)所示的MTPA与近似MTPA控制时转速差波形显示,传统PI控制下转速差需要0.05 s归零,而智能PI控制下转速差只需要约0.01 s即可归零。
图8的近似MTPA控制在传统PI及智能PI调节下的转速及电流对比波形表明,智能PI调节时系统动态性能明显优于传统PI调节下的动态性能,两者的定子电流响应基本相同。
5结 语
本文在永磁同步电动机MTPA控制的基础上将非线性的转矩电流关系进行线性化,研究可应用于工程实际的近似MTPA控制,系统性能与MTPA控制时相似度高,在定子电流幅值有限的情况下提高了电机的电磁转矩。将智能PI调节器应用于近似MTPA控制,改善了系统性能,具有较高的应用价值。
[1] 李长红,陈明俊,吴小役.PMSM调速系统中最大转矩电流比控制方法的研究[J].中国电机工程学报,2005,25(21):169-174.
[2] Tursini M,Parasiliti F,Zhang Daqing.Real-time gain tuning of PI controllers for high-performance PMSM drives[J].IEEE Transactions on Industry aplications,2002,38(4):1018-1026.
[3] 郎宝华,刘卫国,贺虎成,等.基于最大转矩电流比动态磁链给定的直接转矩控制[J].电气传动,2008,38(1):23-26.
[4] 李长红,陈明俊,吴小役.基于DSP的永磁同步电动机控制系统的研究[J].电气传动,2005,35(4):7-10.
[5] 阮毅,徐静,陈伯时.智能PI控制在交流调速系统中的应用[J].电工技术学报,2005,20(3):80-84.
[6] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2006.
[7] 郭卫杰,刘维亭,林永才.智能PI算法在永磁同步电动机控制系统中的应用[J].微特电机,2011,38(3):34-37.