平面控制测量方案设计在高铁专线中的应用
2012-07-16党军宏雷旭华
党军宏 雷旭华 陈 龙
(中国航空港建设第七工程总队,陕西宝鸡 721006)
沪杭客专为设计时速350 km的高速铁路。沪杭客专土建1标段正线里程范围为DK2+210~DK17+600,正线长度15.39 km。
客运专线无碴轨道平面控制网宜按分级布网的原则分三级布设,第一级为基础平面控制网(CPⅠ),第二级为线路控制网(CPⅡ),第三级为基桩控制网(CPⅢ)。
根据控制网设计主要为勘测、施工、运营维护提供坐标基准的目的,在本文中沪杭客运专线GPS控制网设计主要就是CPⅠ网的设计,并按我国颁发的《全球定位系统(GPS)铁路测量规范》精度分级及各级GPS测量基本技术要求中的B级精度的要求进行。
在本次GPS网方案设计中,作者选取了15个点,其中有4个为已知点(见表1,表2),点位沿线分布见图1。
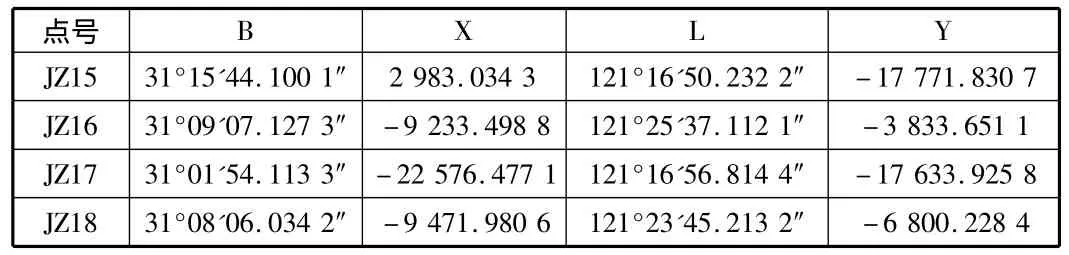
表1 测区已知点经纬度及坐标(上海城市坐标)
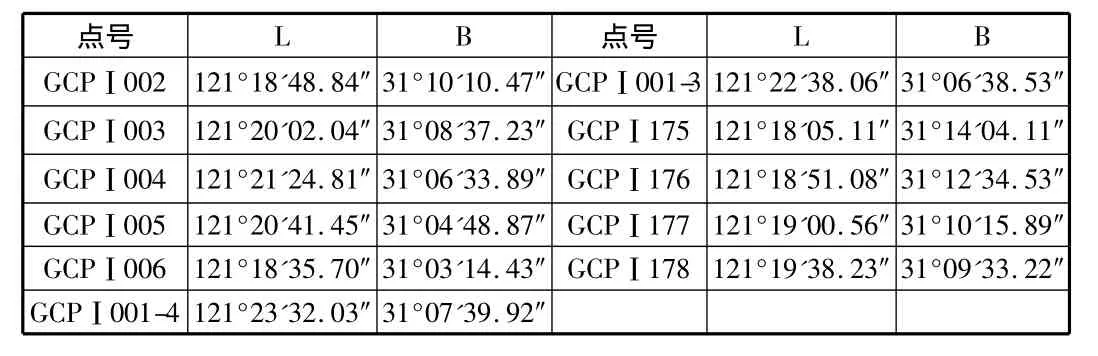
表2 点位概略经纬度
在这个控制网中有CP0控制点4个,编号为JZ15,JZ16,JZ17,JZ18,点位采用强制归心标,桩点保存完好,观测条件良好,可以作为沪杭客专土建1标段精测网平面部分的平差位置起算基准,但考虑到JZ18为原京沪铁路的 CP0点,也是京沪上海段的WGS84坐标的起算点,所以本网也将JZ18作为空间WGS84平差的起算点。方案示意图见图2,相关数据见表3。
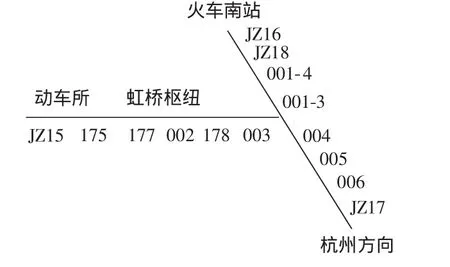
图1 点位沿线分布图
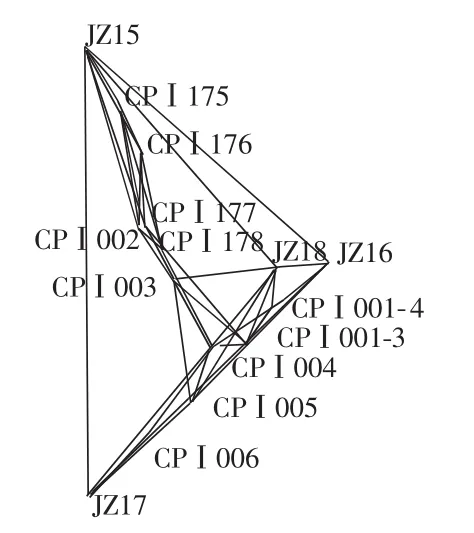
图2 方案示意图
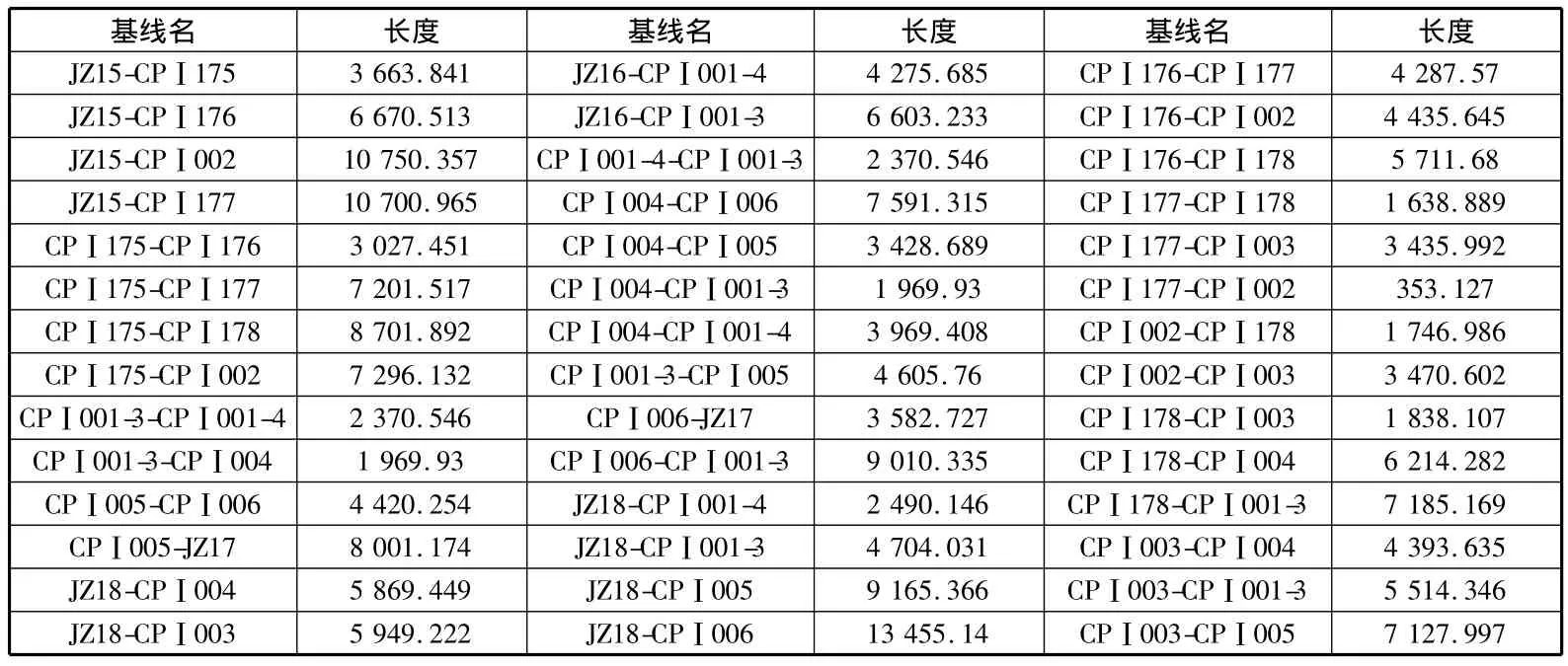
表3 图上量出的数据 m
采用测边网模型利用控制测量优化设计与平差软件计算结果见表4~表6。
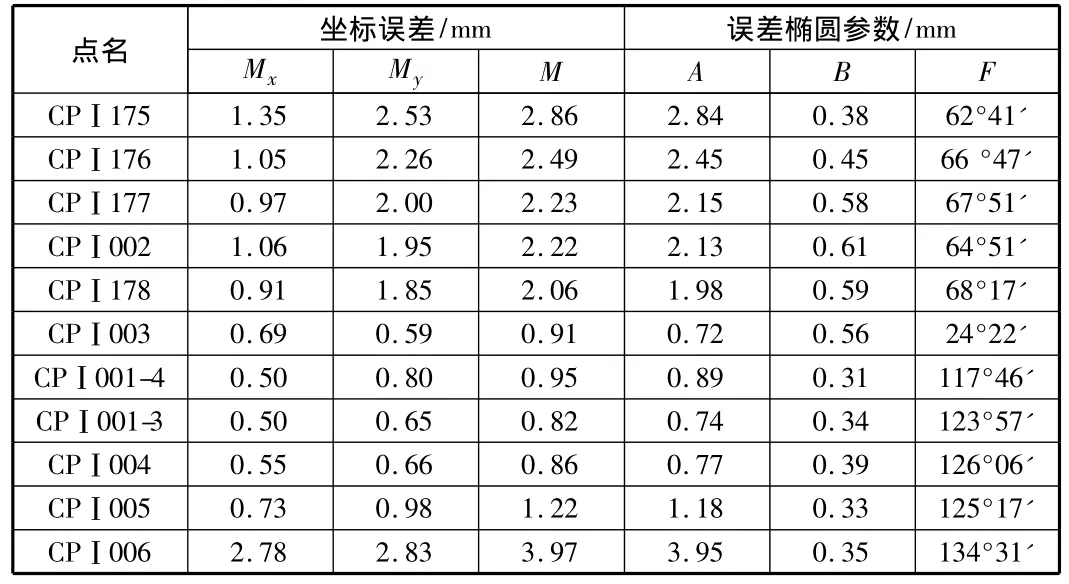
表4 点位误差
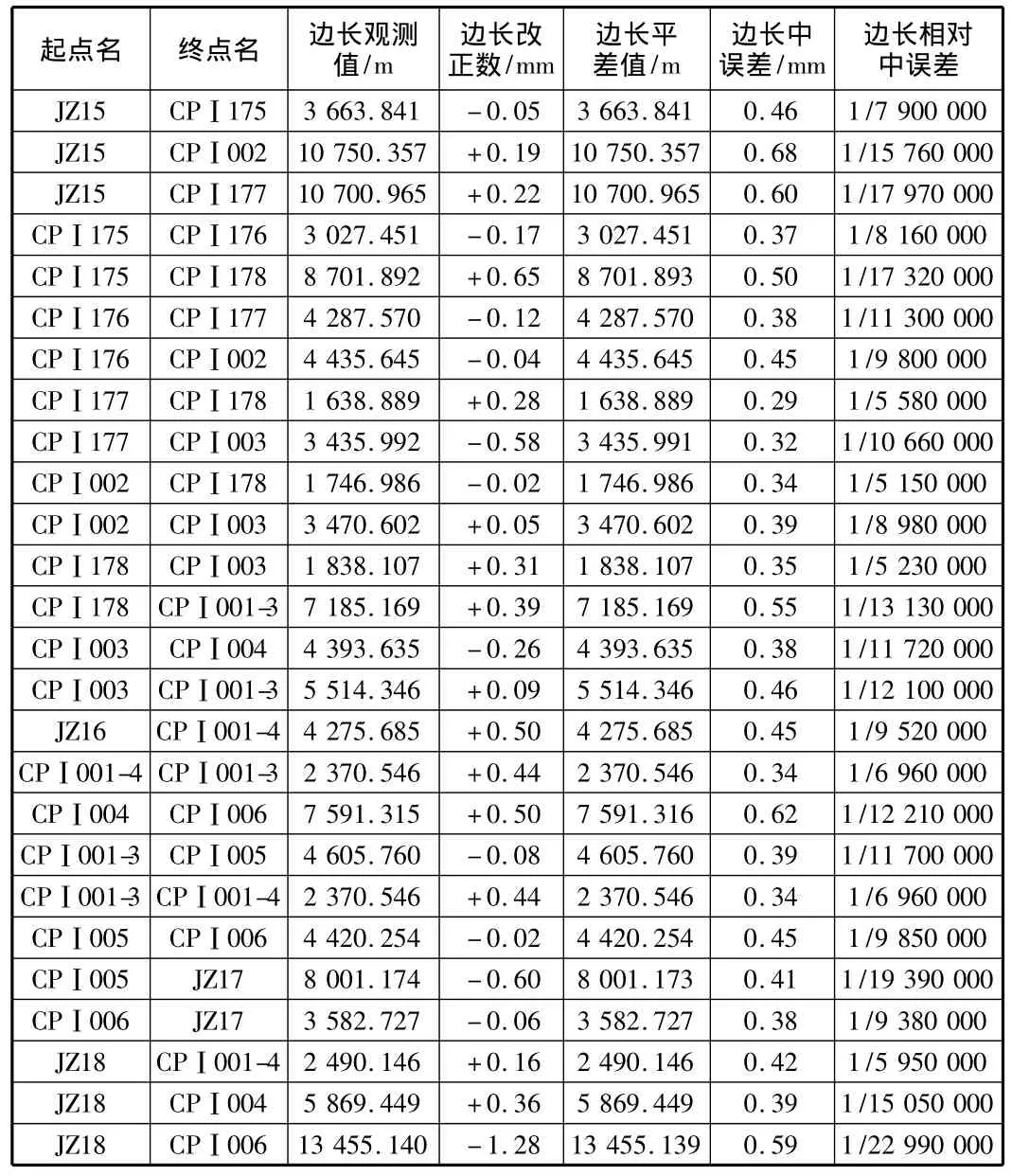
表5 边长平差成果表
由表5中数据发现,满足精度要求。边长相对中误差最大为1/1 190 000,小于精度要求1/170 000,所以所选网型符合要求,点间误差最大为3.97,小于5 mm。
可靠性指标:根据R.A sany提出的公式计算GPS网的主要特征值:C=nm/N。
其中,C为观测时段数;n为网的总点数;m为每点设站数;N为接受机数。在网中:
总基线数:J总=C×N×(N-1)/2;必要基线数:J必=n-1;独立基线数:J独=C×(N-1);多余基线数:J多=C×(N-1)-(n-1);总体可靠性指标 =J多/J独;效率指标:
其中,Smin为最少观测时段数;R为每个点的最少重复观测期数;n为点数;m为仪器数;Sd为设计观测时段数。
计算该方案的主要特征值见表7。
在这里主要对该方案做出了比较,按照规范要求是至少4台接收机进行观测,经过验算和比较发现,9台仪器的投入将是最优的。
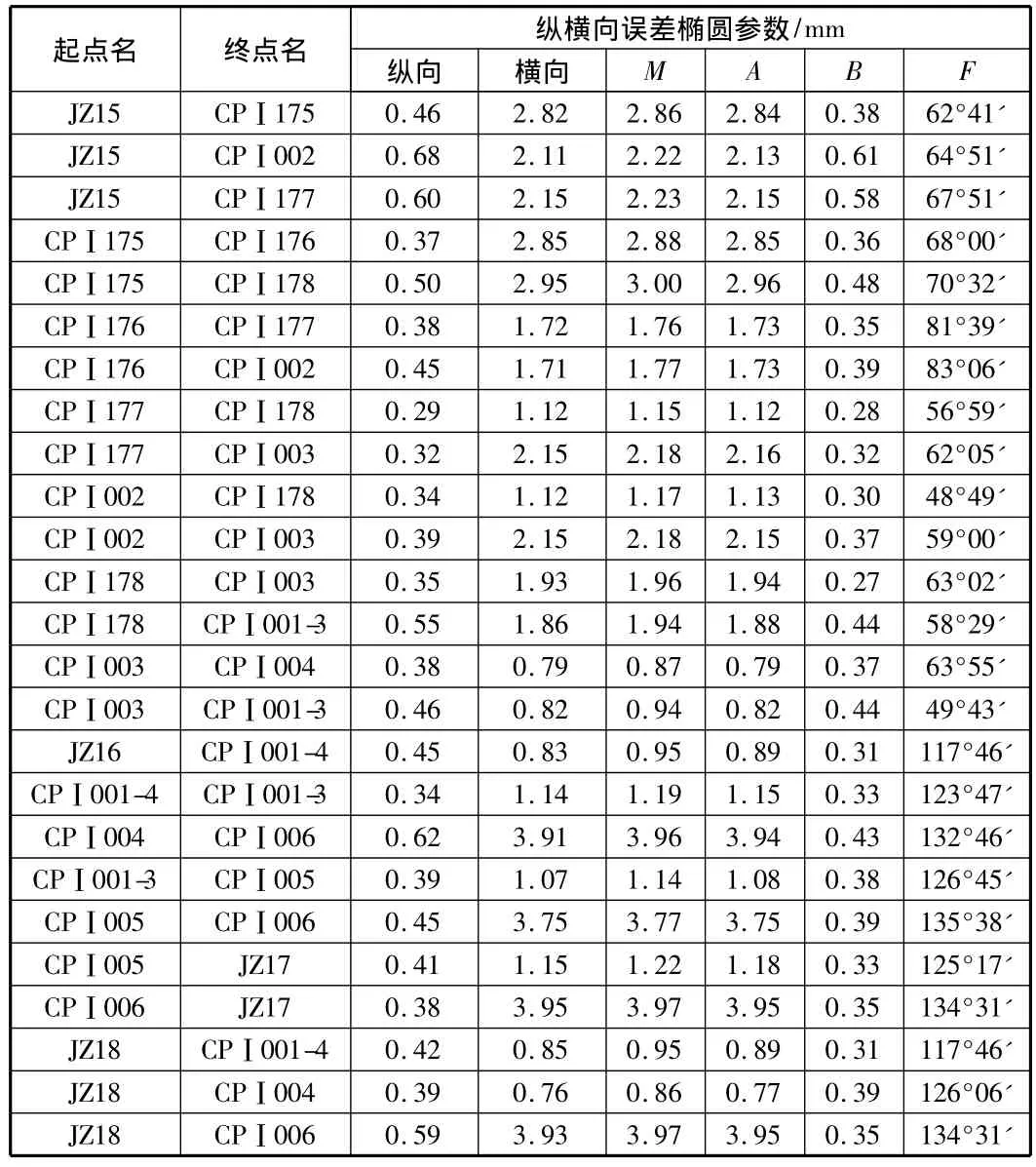
表6 点间误差
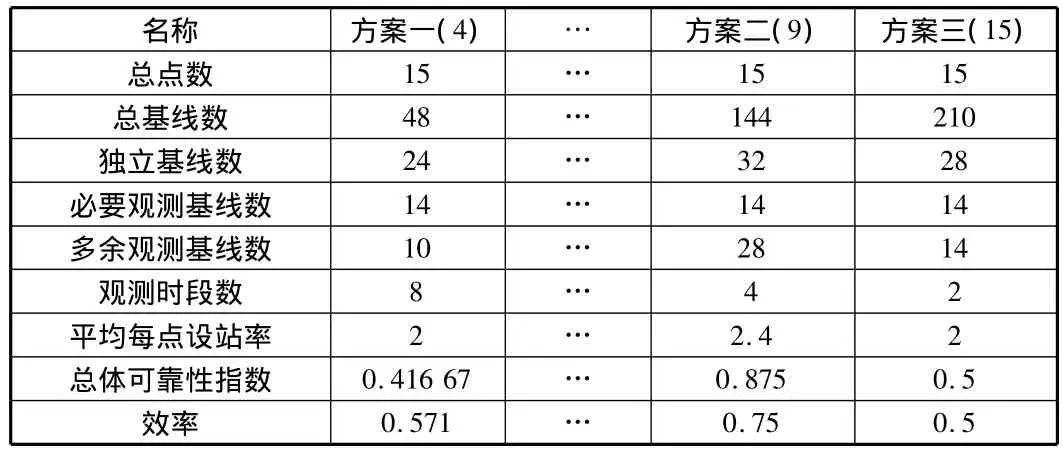
表7 方案比较
在对控制网进行设计时,总希望采取的方案能够尽少的使用人力、物力和财力,并在规定的约束条件下取得最佳效果。对于前面设计的两个方案,我们从以下几个方面进行比较,最终确定方案二作为本次的平面控制网。
1)在精度指标方面进行比较。两种方案都符合相关的限差规定,所以都是可行的。
2)从网的可靠性标准分析。根据规范要求,平均可靠率应大于0.25。网的可靠性分析是指控制网能够发现观测值中存在的粗差和抵抗残存粗差对平差结果的影响能力。在这两个方案设计中,由于方案二GPS网中的多余观测数大大多于方案一,提供了大量的检核条件,所以认为方案二GPS的可靠性较好。
3)从费用标准来看,方案二施测起来也是比较快捷、方便的,同一测站也不需多人完成,节约了人力、物力和财力。
4)从效率指标来看,选择9台仪器的效率最大。
[1]张 勤.GPS测量原理及应用[Z].2010.
[2]铁建设[2006]189号,客运专线无碴轨道铁路工程测量暂行规定[S].
[3]BT 10054-97,全球定位系统(GPS)铁路测量规程[S].
[4]CJJ 8-99,城市测量规范[S].
[5]GB 50026-1993,工程测量规范[S].
