混合式水位测量方法的探究
2012-07-16陈立辉许伟强
陈立辉 ,许伟强 ,何 青
(1.浙江工业大学,浙江 杭州 310032;2.浙江省水文局,浙江 杭州 310009)
0 引言
洋港水文站位于浙江省兰溪市游埠镇洋港村,主要承担施测钱塘江上游衢江控制水位的任务,是衢江沿岸重要的水位监测枢纽。洋港水文站的水位观测设施主要由水位测井和水位台组成,即通常所说的直井水位观测,利用浮子与重锤在垂直测井中升降,进行水位测量,技术成熟可靠。
近年来,随着社会经济的高速发展,衢江上游新建水电站截流发电和城市景观需要而兴建的橡皮坝的拦截,使得上游来水减少,又由于河道中的非法采砂情况日益猖獗使得洋港断面被人为挖深,造成洋港断面最低水位大幅度下降;另外由于水位台附近双马道防洪堤坝的特殊性,致使以前使用较多、技术相对成熟的多种水位测量方式无法直接应用到该水位站上,出现原先建设好的洋港水文站水位测井不能有效测量低水位的问题,需要探索适于测量该站水位的方案。
1 测量方案设计
为保证基础水文资料的完整性,能有效地测量洋港断面的低水位,按照现有技术主要有 2 种方案可以解决。
1.1 双管浮子式水位测量法
双管浮子式水位平衡装置将直井观测中浮子与平衡锤的垂向运行改在 2 根斜管中进行。当浮子随水面升降时,通过钢索与导向轮使球型平衡锤作上下滚动,并带动水位传感器联动,根据水位斜井的倾角调整水位计的轮盘直径就可以使水位传感器准确反映水位变化的量值。
水位计的轮盘直径计算公式为 D斜= D直/sin α。式中:D斜为斜井观测水位计的轮盘直径;D直为直井观测水位计的轮盘直径;α 为斜井与水平面的倾角。
双斜管浮子式水位平衡装置结构如图1 所示,由 2 根并列的斜管(直径≥250 mm,PVC 管)、滚动式球型浮子(直径为 210 mm)和平衡锤(直径100 mm 的铁球,不锈钢镀锌)组成,要求浮子重量大于平衡球重量,一改以往平衡锤垂直升降的传统模式,解决了斜井水位观测中平衡锤的升降问题。其中滚动式球型浮子和平衡锤结构基本相同,结构如图2 所示。
双管浮子式水位观测方法主要技术指标如下:迟滞误差:≤2 cm;测量范围:0~40 m。
双管浮子式水位测量法具有结构简单,可靠性高,安装、调试、维护简单方便等优点,解决了各类水库及特殊河道水位观测的难题。双斜管浮子式水位平衡装置已在浙江省小型水库、河流水位自动采集系统中得到应用,效果比较理想。
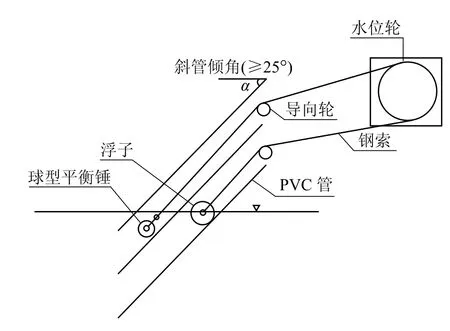
图1 双斜管浮子式水位平衡装置结构示意图
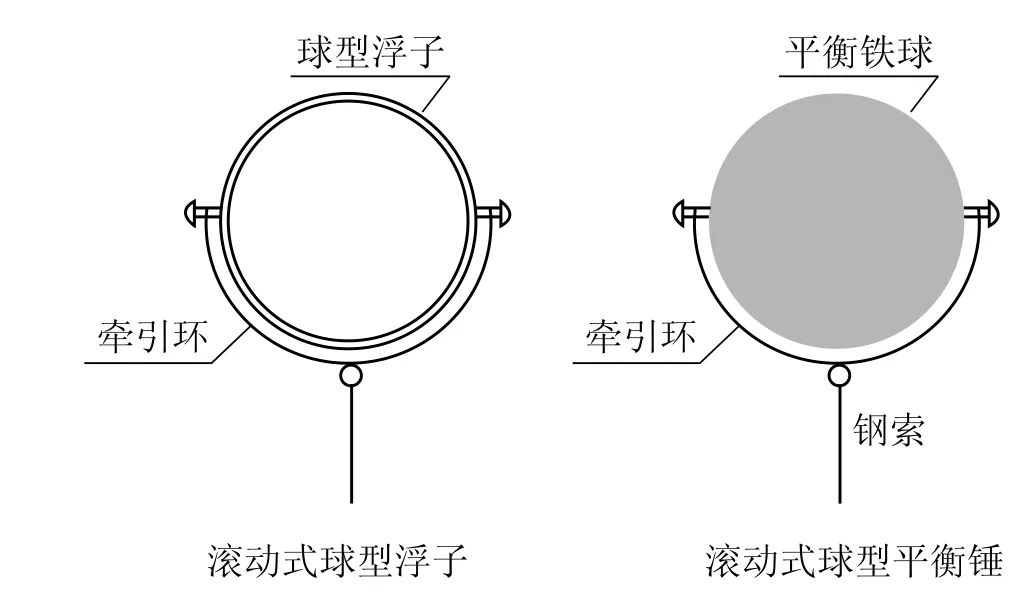
图2 球型浮子及平衡锤结构示意图

图3 传感器安装示意图
对于新建的水位站,该方案对可以有效地解决主测井不能测最低水位的问题。但由于洋港是双马道水位站,另该河道洪水冲击时有发生,同时原来的主井将要废弃,所以该方案不是最佳的测量方案。
1.2 混合式水位测量法
混合式水位测量法,是在原有主测井中机械式格雷码水位传感器的基础上,在马道外的 2 个低水位测井中使用电子水尺传感器,单独测量断面的低水位,同时配以新型水文遥测数据终端实时处理计算 2 种传感器的信息,得到当前断面水位数据,从而解决高低水位测量难以一体化的难题。该水位遥测方案可以克服众多环境因素进行水位遥测。具体设置如图3 所示。
该方案中的电子水尺传感器具有以下几个特点:
1)误差取决于电极间距或分辨率,可以精确控制在 2 mm 或 1 cm;
2)无零点和温度漂移;
3)不受水质、波浪、杂草等影响;
4)无机械运动部件,无锈蚀卡死现象;
5)不需建测井,系统投资小;
6)可以倾斜安装,适合各种环境安装,安装方便;
7)水尺表面有刻度,可随时进行人工标定或校准;
8)功耗低,稳定性好。
该方案的优势在于在低水位处安装 1 种可以长期浸泡分段安装的传感器,同时也利用了原有的主测井的水位传感器,这种混合式水位测量方法可以使投资的成本降到最低,同时也不破坏原有的建筑结构。
2 自动遥测系统组成及功能设计
利用混合式水位测量法,通过遥测数据终端机对前端采集的数据,进行分析、处理、显示、发送、传输,从而构成自动遥测系统(以下简称系统)。
2.1 系统组成
系统主要由遥测数据终端机[1],YR-ADA 数据和格雷码 2 适配器,机械格雷码水位传感器,电子水尺传感器[2]等组成,系统组成如图4 所示。
2.2 电子水尺的性能指标
系统中使用的电子水尺的性能指标如表1 所示。
2.3 数据的采集及传输
电子水尺采用 RS-485 通信方式和 Modbus-RTU通讯协议。YR-TS 适配器与电子水尺之间的通讯协议如下: 通讯协议采用波特率为 9600 bps,1 个起始位,8 个数据位,1 个停止位,低位先发送,无校验。在 RTU 模式中,新的信息总是从至少 3.5 个字符的静默时间开始,紧接着传送第 1 个域:地址域。整帧的信息必须以 1 个连续的数据流进行传输,如果信息结束前存在超过 1.5 个字符以上的间隔时间,则出错。
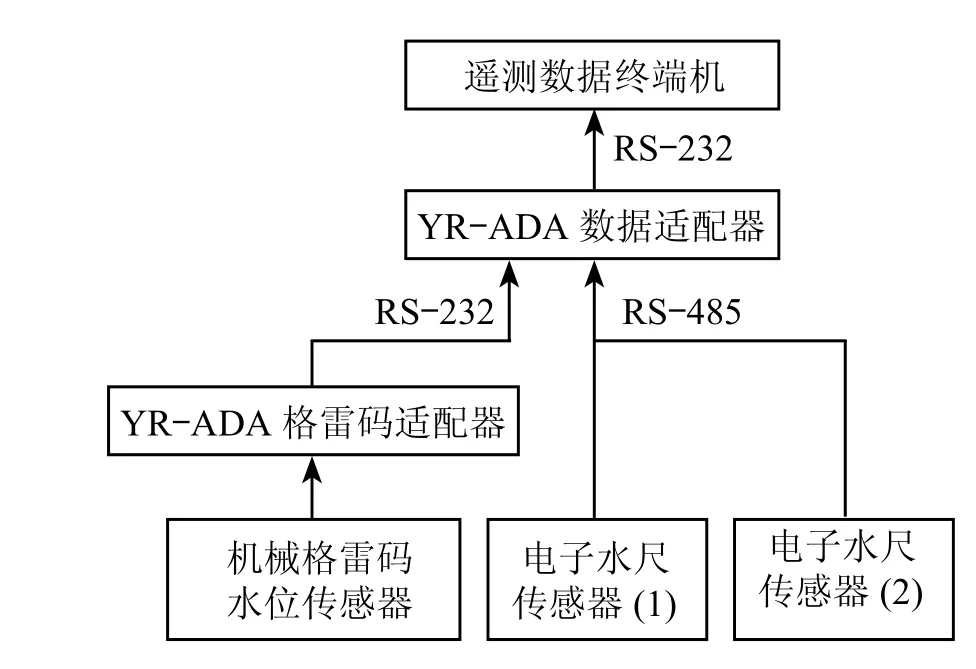
图4 系统组成图
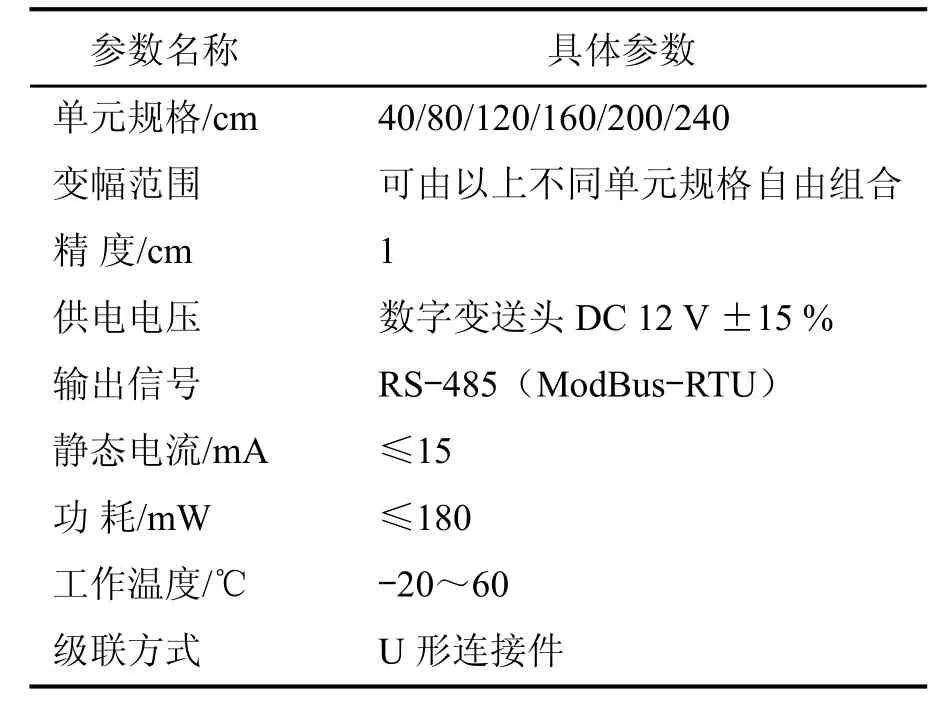
表1 电子水尺性能指标
1 帧信息的标准结构如表2 所示。

表2 1帧信息的标准结构
标准结构具体分析如下:
1)地址域。从机(目标地址)的有效地址范围为 0~247,0 为广播地址,使用广播地址时应保证只接有 1 支传感器,否则会导致数据出错或硬件损坏。
2)功能域。有效编码为 1~255。
3)数据域。数据域由多组这样的数据构成:2 个十六进制数为 1 组,范围在 00~FF 之间。
4)CRC 校验。CRC 生成后,低字节在前,高字节在后。
5)T1,T2,T3,T4 代表每个字节的传输时间长度,共为 4 个字节传输延迟时间[3]。
Modbus-RTU 通讯协议命令功能如表3 所示。

表3 Modbus-RTU通讯协议命令功能一览表
2.4 数据处理
YR-TS 适配器通过 RS-485 接口采用 Modbus-RTU 通讯协议,接收到电子水尺传送过来的数据,对数据进行检码、解码还原,得到测量数据后再根据实际衔接值整合成有效的水位数据。单片机对数据处理的关键代码如下:
//////////////////////////////////////////////////////
// 水位数据采集及整合程序
/////////////////////////////////////////////////////
BYTE TL401_Detect(void)
{
TL401_f i rst_Detect(); //读取 1 号电子水尺数据
TL401_sec_Detect(); //读取 2 号电子水尺数据
Level_Detect(); //读取雷码水位计数据
if(uLevel1! = 0xffff)
{
if(uLevel2! = 0xffff)
{
if(uLevel3! = 0xffff)
{
if (uLevel2<=33){uLevel2=0; }//1 和 2 号电子水尺衔接值
else{uLevel2 = uLevel2-33;}
uLevel=uLevel1+uLevel2; //低水位电子水尺的整合数据
if(uLevel3>=200){uLevel=uLevel3; }//但水位达到 2 m 时,启动主测井的数据
return OK;
}
else
{goto DETECT_FAILED;}
}
else
{goto DETECT_FAILED;}
}
else
{goto DETECT_FAILED;}
DETECT_FAILED:
uLevel=0xffff; //错误标示
return FAILED;
}
在上述数据采集中,由于电子水尺采用 RS-485通信,2 支电子水尺接在同一个 485 信道,所以根据上述的 Modbus-RTU 通讯协议,需要对 1 和 2 号电子水尺通过地址来区别,指令如下:1 号电子水尺指令 0103 0000 0001 840a;2 号电子水尺指令 0203 0000 0001 8439。
3 实际应用
在浙江省兰溪市水情自动测报系统项目建设中,混合式水位测量系统于 2010 年 2 月建成,3 月调试完毕。经过 1 年多的实践,该系统运行正常。尤其,在 2011年 6 月 16-20 日,钱塘江干流连续发生了 2 次流域性大洪水,及时准确的测量,为各级防汛指挥决策提供了依据。
根据《浙江省水文固态存储仪运行使用管理规定》(浙水文【2010】第 59 号)的要求,“各月平均水(潮)位误差不超过 ± 2 cm”[4]。对遥测站 1 年多的人工观测和实时遥测水位数据进行逐日、逐月平均水位比对,月平均最大误差 1 cm,月最高、最低水位最大误差 1 cm,符合水文资料整编精度要求,满足水位资料整编的要求。
对测站 2011 年 6 月 10—25 日人工水位观测与本系统采集的数据进行逐日水位对比,结果如表4所示。
4 结语
混合式水位测量方案,采用在低水位处安装电子水尺来测量因河床断面变化,原有主测井的机械式格雷码水位传感器无法测量的低水位数据,通过遥测数据终端机自动智能耦合多个水位传感器采集的数据,并进行分析处理,有效应对由于河道水位下降、堤坝加固加宽,以及河床断面改变带来的现有水位台无法有效测量低水位的问题。这种测量方法丰富了低水位测量方法,为测量复杂断面的水位提供了更多有效途径。

表4 测站2011年6月10—25日人工、遥测逐日水位对比表m
电子水尺传感器利用水体的导电性,间隔 1 cm放置 1 对感应点,通过感应点的导通与否来表示水位高低,一旦某个感应点故障将导致整个传感器失效。因此在实际使用中,电子水尺传感器量程越短越有利于系统稳定。利用该方案来测量水位时,应尽量避免大尺度使用电子水尺传感器。
[1]浙江省水文局. 浙江省水情信息采集系统研究与应用[R].杭州:浙江省水文局,2010: 128-132.
[2]浙江省水文局. 双斜管浮子式水位平衡装置:中国,CN2779358[P]. 国家知识产权局:2006-05-10.
[3]太原理工天成科技股份有限公司. TC401 感应式数字水位传感器用户手册[R]. 太原:太原理工天成科技股份有限公司太原,2009: 6-8.
[4]浙江省水文局. 浙江省水文固态存储仪运行使用管理规定(浙水文【2010】第 59 号)[S]. 杭州:浙江省水文局,2010: 2-5.
