光电检测传感器阵列在运动物体检测中的应用
2012-07-12郑州大学物理工程学院李志曈
郑州大学物理工程学院 李志曈
光电检测传感器阵列在运动物体检测中的应用
郑州大学物理工程学院 李志曈
本文构建了一个光电检测传感器阵列,基于覆盖理论和卡尔曼滤波算法,该阵列具有采集和处理阵列覆盖区域中所感知对象信息的功能,即检测和描述感知对象的存在、运动及其运动轨迹等情况。
光电检测;传感器; 阵列;覆盖理论
1.引言
在日常生活中,移动目标的实时监测越来越显得必要,如学校、商场、医院等公共场所需要检测某些区域的人数、流动方向、移动速度、出入人数等信息,某些重要区域的安全监控,工厂生产流水线工件的监测等等。为此,本文基于覆盖理论和卡尔曼滤波算法构建了一个光电检测传感器阵列,该阵列具有采集和处理阵列覆盖区域中所感知对象信息的功能,即检测和描述感知对象的存在、运动及其运动轨迹等情况。非常适合于上述区域检测使用。在本文中,也考虑经济因素,即在整个传感器阵列中如何能够尽量减少传感器的数目,节约成本。运用数学图论中的覆盖理论,把问题抽象成数学模型,并使用智能算法,试图能够很好的解决这个问题。
2.监测系统描述及数学模型
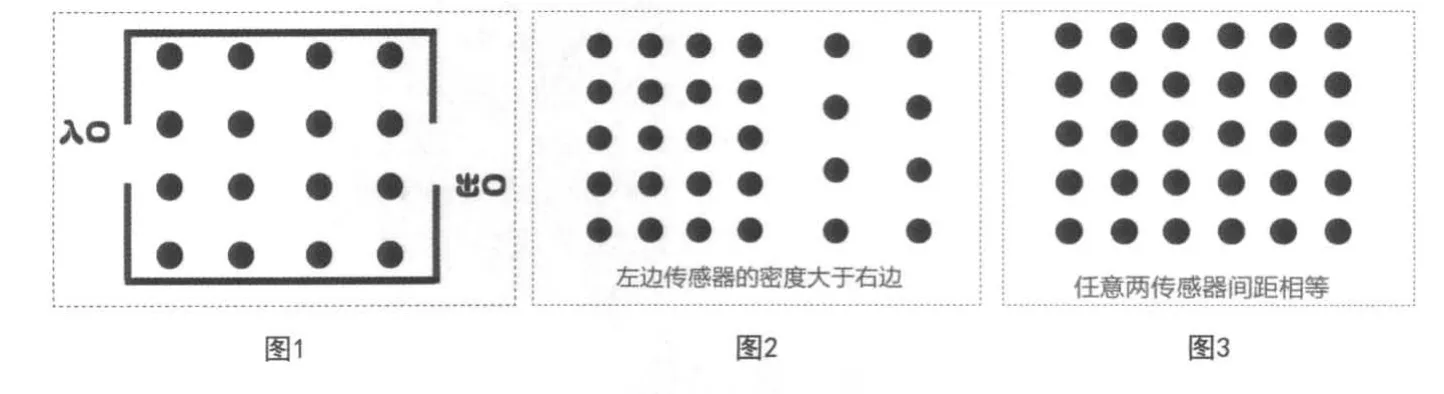
系统描述:在一定的平面区域内,在其上方平面上设置红外光发射器阵列,在地面上设置相对应的红外光探测器阵列,如图1所示。
当没有物体进入时,红外光探测器感知信号光存在,当有物体进入时,当某些光路被阻断,探测器感知不到信号光即表明物体进入。系统采用该工作模式来判断阵列中物体的存在、运动及其运动轨迹等情况。
数学模型:
将光电检测传感器阵列转换为一个点阵的阵列方式即在平面上按一定规律分布的点阵,每个点的大小忽略不计。用一个大小一定的纸片将其覆盖(纸片代表实际过程中要检测的物体)。无论纸片在什么位置,一定要保证它至少覆盖平面上的一个点,其在任何的位置都能被光电检测传感器阵列检测到。由覆盖问题的知识可以知道:要想保证纸片至少覆盖一个点。则纸片的最小线度要大于平面上光电检测传感器阵列任意两点之间距离的最大值。
考虑如下一种情况如图2所示:
如果在整个平面上,已经可以满足纸片至少可以覆盖其中的一个点,且位于左半部分的点阵的平均密度比位于右半部分的点阵的平均密度要大。这样左半部分的传感 器数量就要比右半部分的传感器数量要多。虽然同样可以达到检测效果,但是前者却很明显浪费了资源。因此,传感器应当采取均匀分布的方式(任意两个传感器之间的距离相等),且任意两点的距离要小于被测物体最小线度。这样做就能够用最少的传感器做到,无论物体在什么地方,都能够检测到。虽然这样测量并不十分精确,考虑到经济的因素,可以满足要求,检测到物体的运动。具体阵列方式可以参考如图3所示的示意图。
规定物体的入口和出口已知。用图论中的数学语言表达传感器模型,即为G=(V,E)。任 意两个传感器之间的距离为v,假设物体是规则图形,不妨设物体是圆的,且边长为R1,R2,R3,…,RN。
在具体的目标物定位的判断中,我们可以利用恒虚警检测(CFAR)判断是否检测到目标。设获得信号即时间的最大的权重为1,当权重值大于0.5时,判断为检测到物体。
判决函数如下:

式(2)中,当R(n)=1时,判断检测到目标。当R(n)=0是,判断为没有检测到目标。
3.阵列算法研究
智能算法是智能技术领域的一个分支。其产生背景是,人们生活在知识新陈代谢速度快和信息繁杂的社会里。如何从海量数据中采集到信息,又如何从信息中归纳知识,是一项高技术并且劳动强度很大的工作。为了减轻人们的劳动量,同时也为了节约社会成本,出现了一些载有能代替人类脑力劳动的算法—智能算法。它们具有一些类似生命体智慧的特征,其实就是经过抽象以后的机器学习。常用的智能算法有很多,例如:粒子群算法、蚁群算法、遗传算法、免疫算法、神经网络算法、模拟退火算法等。
在进行目标物定位时,有直接搜索目标定位算法和卡尔曼滤波算法[7]。而在运动目标的定位中,卡尔曼滤波要优于直接搜索法。由于直接搜索法要取遍所有目标文职可能的值,因此计算量很大。而卡尔曼滤波算法则不同,它可以大大的减少计算量。本文则采用卡尔曼滤波算法[9]。首先,利用系统的状态方程,来预测下一状态的系统。

式(3)中,X(n|n-1)是利用上一状态预测的结果,X(n-1|n-1)是上一状态最优的结果,U(n)为上一状态的控制量。

式(4)中,P(n|n-1)是X(n|n-1)的协方差,P(n-1|n-1)是X(n-1|n-1)对应的协方差(以下均适用),Q是系统过程的协方差。
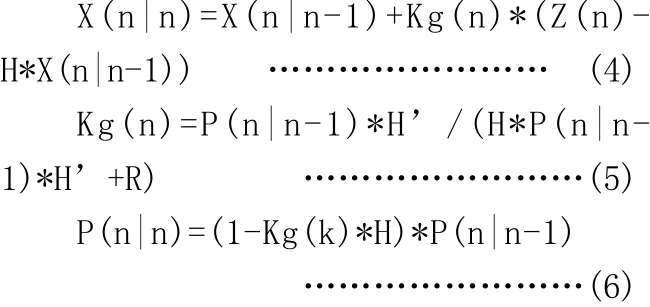
X(k)的最优化估算值为X(n|n),其中Kg为卡尔曼增益。
4.结论与展望
本文给出的传感器阵列方法以及卡尔曼滤波算法能够测量出物体的运动,可以用于公共场所中的人流量检测、工厂生产线中物体的运输等领域,可应用的地方十分广泛。但是只能测量物体在二维平面上的运动(即在一个平面上的运动)。试想一下,如果在给定的三维空间中的三个维度上都阵列上,综合三个维度上传感器测量出的参数,就可以给出物体在三维空间中的运动轨迹,可以用于飞行物体的运动检测。希望能够在不久的将来看到类似的物体检测装置。
[1]张丽霞,汪文勇,李炯.无线传感器网络的目标定位问题研[J].电子科学大学学报.
[2]陈鹤鸣,赵新彦.激光原理与应用[M].电子工业出版社.
[3]周炳琨,等,编著.激光原理[M].国防工业出版社.
[4]李琪.传感器网络中运动目标检测与定位[J].信息技术.
[5]陈明刚,张陆勇,刘贺,陈鹏.基于最小覆盖的多点中继集及其选择算法[J].信息与网络技术.
[6]王耀南.李树涛.多传感器信息融合及其应用综述[J].控制与决策.
[7]李琪.传感器网络中运动目标检测与定位[J].信息技术.
[8]孙惠泉,编著.图论及其应用[M].科学出版社.
[9]安毓英.曾晓东编著.光电探测原理[M].西安电子科技大学出版社.
[10]谢洪森.基于G IS信息的CFAR检测器[J].
李志曈(1990—),男,北京人,研究方向:光电子。