可控硅—直流电机调速系统的分析
2012-12-17厦门宏发电声股份有限公司陈国华
厦门宏发电声股份有限公司 陈国华
通过对比和比较直流电机跟以往的交流电机,发现它的结构较为复杂,在维修的过程中会遇到更多的困难,不过它的起、制动性能比较优越,而且在调速的过程中还能在比较大的范围里面保持平滑。本文所说的直流电机调速系统主要包括的元件有:可控硅、磁放大器以及直流发电机等。在该系统中由于应用到了可控硅,而可控硅能够更高倍数的将功率放大,并且体积比较小,使用寿命相对较长,具有良好的快速性等,因此直流电机调速系统到目前为止已经在实际的生产生活中得到了广泛的应用。在某造纸厂中,有机的将可控硅整流器应用到了设备系统当中,有效的实现了平滑的调速过程,而且在自动控制在基础上,保证了该厂的纸张生产产量,提高了纸张的质量水平。
1.反馈控制系统的简要概述
在结构上,可以将自动控制系统明确的划分为开环和闭环控制两部分。其中开环控制可以说是自动控制系统里最为简单方便的控制方式,具有以下主要特点:系统的输出量不会对系统的控制量产生影响,也就是说控制器跟被控制对象两者之间只存在正向的控制,无法进行反馈控制。
在某些印染设备采用的控制方法就是开环控制,负载的大小以及电源电压的波动情况会对电机在实际生产过程中的转动速度产生一定的影响,无法进行自动调节。
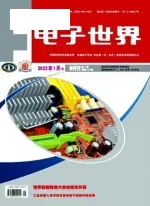
闭环控制的主要特征有:系统的输出量会直接对控制量产生一定的影响,也就是说控制器和被控制对象二者之间除了有一定的正向作用之外,还能够进行有效的反馈。图1显示了该控制方法的示意图:
闭环控制大多数时候是通过反馈作用实现的,因此通常也把闭环控制成为反馈控制。一般在反馈控制系统里面,如果外界环境对输出量产生一定影响,那么该系统会按照设计规定的要求自动进行调节。
2.可控硅-直流电机调速系统
在直流电机调速系统里面,被控制的对象是直流电机,转动的速度是该电机的输出量,所以计算直流电机转动速度的表达式为:

由公式我们可以看出,我们可以利用三种方式对直流电机系统进行调整速度,分别是对电枢电压V进行调节,对磁通φ进行调节,对电阻进行调节等。一般在调速的过程中会同时调整电压和磁通,到目前为止自动化系统大力推广利用可控硅电源对电压和磁通进行有效的调整,以下是几种比较常见的调速方法:
2.1 采用电压负反馈的方式进行自动调速
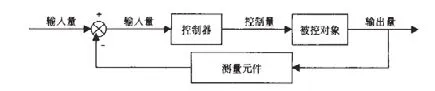
图1 闭环控制的具体示意图

图2 采用电压负反馈的方式进行自动调速
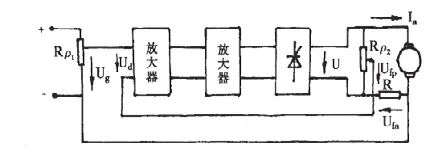
图3 采用电流正反馈和电压负反馈二者相结合的方式进行自动调速
从图中我们可以看出供给直流电机发电的电压是来自于整流电路,而其输出的电压会受到控制角α的直接影响,触发电路能够提供系统中所需的控制信号。
在电压Ug的值保持固定不变时,如果将负载持续的加大,将电枢电流也不断的增大,那么电动机那端的电压U就会不断的降低,引起UF出现下降的现象,转动速度也会随之逐渐减慢,Ud4g-4F有升高的情况,在经过放大之后,U持续上升,电机的转动速度逐渐的趋近于原值,转动速度逐渐降低。具体的调整过程如下所示:
负载

2.2 采用电流正反馈和电压负反馈二者相结合的方式进行自动调速
如果电压负反馈不能有效的进行自动调整转动速度,那么可以在这种方式的基础上,采用电流正反馈的方法进行自动调速,具体情况例如图3所示:
图3中我们可以看出电阻R引入的电流能够正面的进行反馈,所以Ufa=Ia.而由于该电阻R来源于电动机中的电阻R,因此会跟电压负反馈同时添加到输入端。
Ud=Ug-Ufp+Ufa
如果电动机的负载逐渐的增加,那么fp反而会降低,而Ufa会出现增高现象,并且都会最终导致Ud增加,能够有效的扩大调正速度的范围,主要是因为Ufa增加导致Ud增大的那一部分能够在一定程度上补偿由于电枢压降的不断增加而造成的转动速度降低。
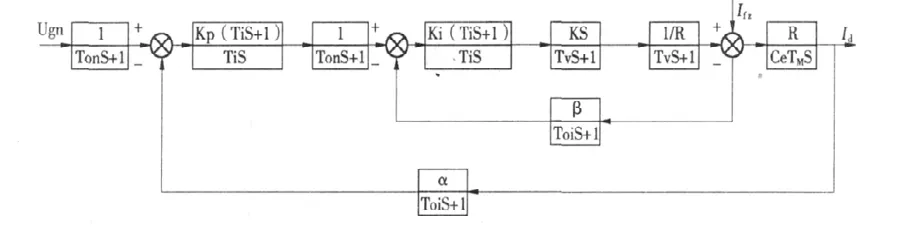
图5 速度、电压、电流三环控制方框图

图4 采用转速负反馈的方式进行自动调速

图6 饱和非线性状态曲线
2.3 采用转速负反馈的方式进行自动调速
在图4中我们可以看出,电动机的转动速度和测速发电机具有的电枢电压呈现正比例的状态进行增加会减少。如果电机受到的负载逐渐增加,那么测速发电机的电枢电流Ia也会增加,导致电动机的转动速度减慢,测速发电机的UCF相应的降低,如果Ug是一个固定不变的值,那么Ud=Ug-UCF的值会不断的上升,放大器的输出不断的增大,逐渐的缩小了控制角а,最终导致可控整流输出的具体电压值U不断增加,电机逐渐还原至原值。具体的调节过程如下所示:
负载

3.模拟控制静动态参数和数字之间的分析对比
3.1 对可控硅直流进行的控制
如果通过电流,电压以及速度进行控制的话,图5是其具体的方框图。一般来使,关于闭环系统,不管是其拢动量还是参考输入都固定时,Id也就是被控量也基本固定了。不管是拢动量还是参考输入,二者哪一个出现改变,参考输入会和反馈量形成另一个作用误差,在控制作用的基础上,使输出量根据新参考输入值趋于稳定,也有时候会慢慢恢复到以前的数值后在形成新平衡,可是因为系统的惯性作用以及储能元件的存在,无法在短时间内实现新的平衡,需要必要的过程。
在摸拟控制电路设计时,无论是在时域还是频域考虑,都要求系统首先必须是稳定,对超调量、过渡过程的时间、振荡次数提出一定要求,再就是系统稳态误差应满足。可这三种要求之间又相互矛盾和制约,很难建立一个同时达到理想状态系统结构和参数。
3.2 对数字进行的控制
因为这个控制系统属于非线性系统,因此对其设置的时候,选择了饱和非线性,像图6所展示的那样。因为这个控制系统是通过数码实现传递的,属于数控系统,能采取差分方程过程的方式来说明这个系统的变化过程。关于非线性系统,其信号并没有将输入信号频率的正弦分量包含在内;从物理角度而言,非线性系统发生振荡是能够存在的,可是振幅和初始条件没有任何关联,是固定的;不管是系统的参数还是结构都不能对数字控制非线性系统在稳定性方面产生影响;关于非线性系统,输入信号的实际幅值是影响暂态响应曲线具体形状的原因之一,主要是由于非线性系统不满足迭加原理导致的。
PLC对模拟量信号的处理,是将模拟信号变换成数字信号(A/D转换)。A/D变换精度取决于A/D变换器的位数,如10V电压要求以1mV精度变换时,精度1mV/10V=0.01%,即1/3200十进制的3200用二进制表示10位,该系统精度等级足以满足控制系统要求。且该系统中采用6RA7018整流装置均以积分方式变换,可使信号尖峰平均化,从而使系统运行平稳、可靠。
本文大概描述了几种常用的调速系统,在实际的声场过程中为了能够将系统的动态和静态进行适当的调整,还会采取引入电压微分负反馈以及电压积分负反馈等方式进行转速的调整,如果实际需要还会将上述几种反馈方式进行有机的结合应用。
[1]李文强,张荣刚.关于直流电机的结构和工作原理分析[J].科协论坛(下半月),2011(06).
[2]龚东方.可控硅整流器的调试及其对直流电机的影响[J].山西建筑,2004(18).
[3]黄俊,王兆安.电力电子变流技术[M].北京:机械工业出版社,2006.