海监船与渔政船主尺度模型研究
2012-07-12王运龙谌志新
刘 飞,林 焰,2,李 纳,杨 蕖,王运龙,谌志新
(1.大连理工大学船舶工程学院船舶CAD工程中心,辽宁 大连,116024;2.工业装备结构分析国家重点实验室,辽宁 大连 116024;3.中国水产科学研究院渔业机械仪器研究所,上海 200092)
海监船与渔政船主尺度模型研究
刘 飞1,林 焰1,2,李 纳1,杨 蕖1,王运龙1,谌志新3
(1.大连理工大学船舶工程学院船舶CAD工程中心,辽宁 大连,116024;2.工业装备结构分析国家重点实验室,辽宁 大连 116024;3.中国水产科学研究院渔业机械仪器研究所,上海 200092)
分析了我国海监船和渔政船发展现状及发展趋势。整理分析相关的船型数据资料,利用逐步回归的数学方法,分别基于Excel回归分析、MATLAB的BP神经网络工具箱和RBF神经网络工具箱,建立了海监船和渔政船主尺度的数学模型,并对3种数学统计模型进行了实船验证和误差分析,结果显示BP神经网络和RBF神经网络模型误差较小。数学模型的建立有利于分析和掌握海监船与渔政船主尺度变化的规律,为报价设计和初步设计提供了科学依据。
海监船;渔政船;主尺度;数学模型;回归分析;神经网络
0 引言
我国国土面积幅员辽阔,除拥有960万km2的陆地面积外,还拥有近300万km2的海洋面积,海岸线超过3.2万km(含1.8万km大陆海岸线和1.4万 km 岛屿海岸线)[1]。
2010年,中国海洋生产总值达38 439亿元,占国内生产总值的9.7%[2]。根据对海洋经济发展的预测,到2020年我国海洋总产值将达到5.1万亿元,占当年国内生产总值的14%以上,成为国民经济的主要支柱产业[3],海洋经济在国民经济发展中正在发挥越来越重要的作用。
随着南海问题和钓鱼岛主权问题的不断升级,我国海洋权益正受到越来越严峻的挑战,我们必须加强海洋权益的维护。除了强大我国海军力量之外,还要加强正常的渔业执法和海洋巡航监视,加强对专属经济区的巡航护渔和海洋权益维护能力。为此,国家海洋局和农业部在近年批准了多艘不同吨位的海监船和渔政船的建造。海监船和渔政船,尤其是大吨位和高航速的海监船和渔政船的设计和建造进入一个高热期。
1 海监船和渔政船的设计特点
海监船和渔政船主要职能是依照有关法律和规定,对国家管辖海域(包括海岸带)和渔场实施巡航监视,查处侵犯海洋权益、酷渔滥捕、违法使用海域、损害海洋环境与资源、破坏海上设施、扰乱海上秩序等违法违规行为,维护渔场生产秩序,处理渔业生产纠纷,并根据委托或授权进行渔业生产指挥、发布渔情和气象通报以及海上医疗、海难救助等其他海上执法工作及任务。
海监船和渔政船因其执行任务的特殊性,有别于常规渔业船舶设计,其中一些直接由军船改造而成,如中国目前最大的“中国渔政311”船即由南海舰队“南救503”船改造而成。
目前,中国拥有最大吨位的渔政船为于2009年初装备使用的“中国渔政311”,该船的总吨位为4 450 t,长113.5 m,宽15.5 m、续航力3 500 n mile,持航50个昼夜,最高航速20 kn。于2010年3月装备使用的“中国渔政310”,是目前国内最先进的海洋执法船,总吨位为2 580 t,长108 m,宽14 m,续航力为6 000 n mile,持航60个昼夜,可驶往国际无限航区,最大航速可达22 kn。配备舰载Z-9A型直升机,配置现代化的水上宽带卫星通信系统及光电跟踪仪取证系统,设有海上红外线映像仪和彩色鱼探仪等特种设备,是目前我国渔政系统船舶中航速最快、总体性能最先进及特种设备配备最齐全的渔政船。
为适应监督、检查并在必要时追捕、扣留违章的需要,渔政船的航速较高,大中型通常为14~20 kn,有的超过20 kn;稳性和适航性也高于渔船;为了便于在渔船密集的渔场中巡航和在水上与渔船相靠,操纵性能较好,干舷较低。
2 海监船、渔政船主尺度回归分析
2.1 项目背景
大连理工大学船舶CAD工程中心从2009年底接连承接大连300吨级渔政船[4]、山东300吨级渔政船[5]、大连 400 吨级海监船[6]和 45 m 海域看护船[7]等的技术设计工作,对海上执法船的设计积累了宝贵的经验。为便于更好地进行相关方面的工作,对国内外海监船、渔政船及相似船型资料进行了搜集整理,通过统计回归分析,得出了相关的规律,以便于更好地指导设计。
2.2 实船资料和建模方法
2.2.1 以总吨位或排水量为变量进行分析
近年来,世界各主要渔业国家渔政船的发展趋势是监测设备更加先进,远洋和外海渔政船更加大型、多功能、多用途化。目前我国的渔政船多为中小型船,大型渔政船较少。
1)样本分析
收集到国内外相关船型共计136艘(主要包含1990年以后服役的船舶),其中国内28艘,国外108艘,在国外的样本中,大多来自于日本、韩国和美国,样本以中、大型为主(由于搜集的样本资料不是很全,每艘船不能全部包含所要求的数据资料)。在132个有效样本资料中,有71个提供了总吨位(GT)数据,67个提供了排水量数据,故在进行回归分析时,对提供总吨位的样本进行总吨位与其他主尺度的分析,对提供排水量的样本进行排水量与其他主尺度的分析。
搜集到的样本涵盖了从100多总吨位的中小型船到几千总吨位的大型船,吨位最大的为日本的渔业调查船NISSHIN MARU,总吨位为8 044 t,吨位最小的船为中国渔政44025/44163/44081系列船,总吨位为139 t。表1统计了各分段内样本数量分布情况。

表1 样本船各吨位分布情况Tab.1 The tonnage distribution of the sample vessels
分析可知,总吨位和排水量处在300~1500之间的船舶数量较多,说明样本中中型海监船、渔政船数量相对较多,而小型和大型船数量则相对要少。
2)回归结果
由于样本数据量相对较少,为提高回归公式相关度,故在进行分析时不进行吨位或排水量阶段划分,而对提供总吨位和提供排水量的船舶分别建立一套通用的数学模型。
建模时,先对样本资料进行分析,剔除明显不合理数据,分别利用Excel回归分析、MATLAB的BP神经网络工具箱和RBF神经网络工具箱进行,进行数学模型的回归,最后再进行数学模型的验证。
①以GT为自变量的统计公式
以总吨位GT为自变量,分别建立垂线间长LPP、型宽B、型深D和吃水d与GT之间的函数关系,回归模型如图1所示。
②以Δ为自变量的统计公式
以排水量Δ为自变量,分别建立垂线间长LPP、型宽B、型深D和吃水d与Δ之间的函数关系,回归模型如图2所示。
2.2.2 以船长作为变量进行分析
1)样本分析
由于渔政船和海监船等执法船的特殊性,其设计和建造一般须按照《钢质海洋渔船建造规范》[8](以下简称《规范》)进行,《规范》中对船长则有具体的要求,例如结构方面在第一篇船体2.17.2.2中规定:当船长L<30 m时,舱口围板厚度可按公式t=0.05L+6.5 mm所得之值减小2 mm;电气方面,第三篇电气装置2.4.3.1规定在船长不小于45 m的船舶至少应设置2台变压器;舾装方面,第五篇消防第2章分别讨论了船长不小于60 m的船舶、船长不小于45 m但小于60 m的船舶、船长不小于30 m但小于45 m的船舶,以及船长小于30 m的船舶的结构防火要求。可见,船长对于渔政船和海监船的重量(排水量)及性能有较大的影响,故在此以船长(垂线间长LPP)为变量进行回归分析,结合渔政船和海监船设计特点,以24 m,30 m,45 m,60 m,75 m和100 m作为分界点。
分别将以上2种情况下的船长分布情况列于表2中,通过分析可知,船长大部分布在30~75 m范围内,即中型船舶占较大比例,与总吨位和排水量分析一致。

图1 主尺度与总吨位GT关系散点图Fig.1 The relationship scatter of the principal dimensions and gross tonnage

图2 主尺度与总吨位Δ关系散点图Fig.2 The relationship scatter of the principal dimensions and displacement

表2 样本船垂线间长LPP分布Tab.2 The LPPdistribution of the sample vessels
2)回归结果
分析总吨位GT和排水量Δ与船长LPP的关系,得出回归式(1)和式(2),散点分布图如图3所示。
2.3 数学模型验证
为了验证所提出的数学模型的有效性,分析这些回归公式的误差范围,分别选取样本中的5艘船舶进行误差分析,表3~表5分别是按GT、Δ和LPP回归建立数学模型后的误差分析结果。可以看出,通过回归计算所得目标值与实际值误差较小,总的来说,以总吨位GT为自变量的数学模型误差分析中,BP回归模型的结果误差较小,以排水量Δ为自变量的数学模型误差分析中,RBF回归模型的结果误差较小,可作为经济论证和初步设计时参考。

表3 以总吨位GT为自变量的数学模型验证Tab.3 The mathematical model validation based on the gross tonnage as the independent variable
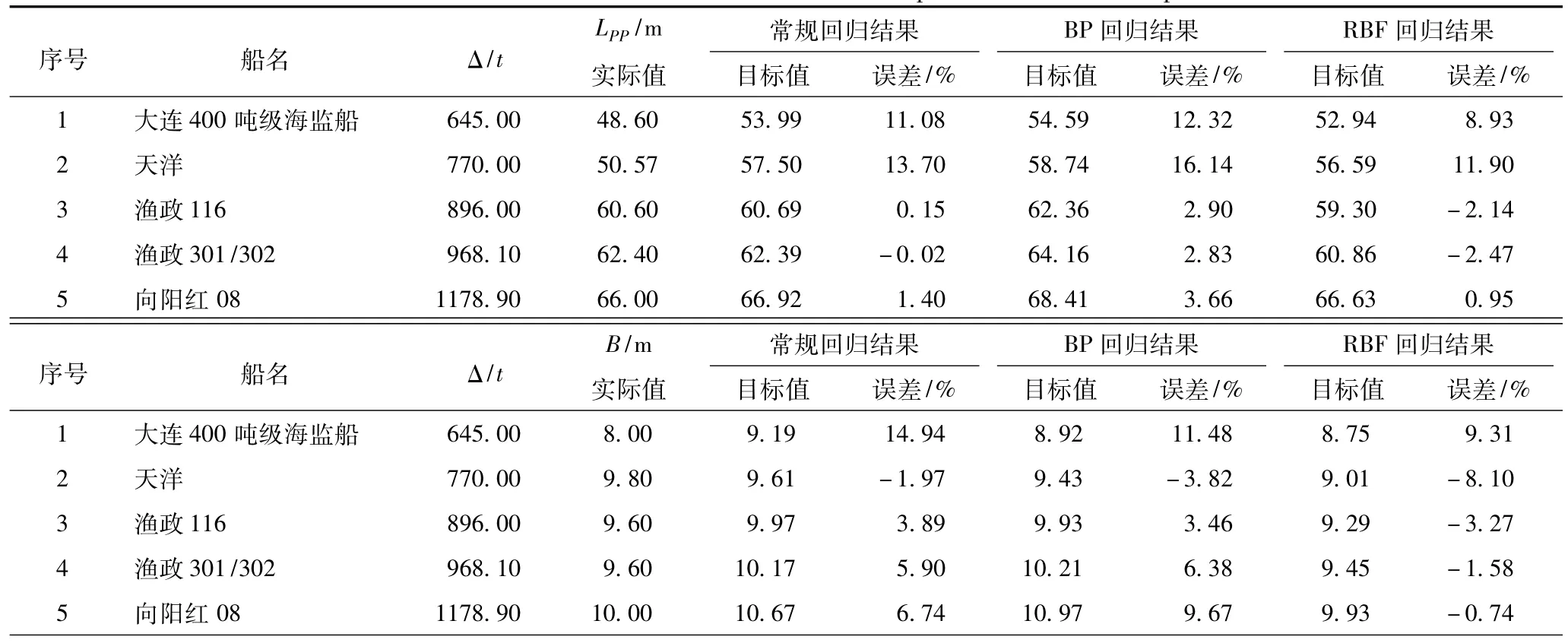
表4 以排水量Δ为自变量的数学模型验证Tab.4 The mathematical model validation based on the displacement as the independent variable

(续表)
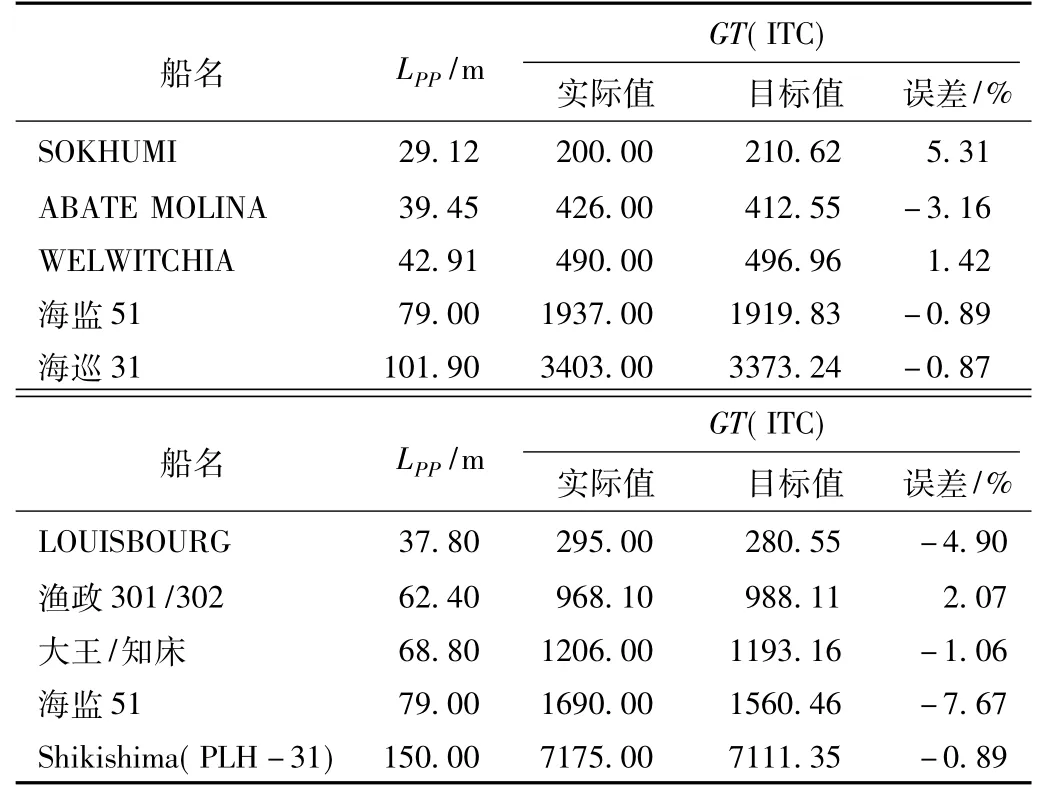
表5 以垂线间长LPP为自变量的数学模型验证Tab.5 The mathematical model validation based on the LPPas the independent variable
3 结语
本文通过对渔政船、海监船主尺度进行回归分析,建立一定的数学模型,分析了总吨位或排水量与主尺度之间的关系,并通过实船对回归模型进行验证,通过误差分析,证实模型的可靠性和适用性。提供一定的渔政船和海监船主尺度变化的规律,为渔政船、海监船的初步设计提供了很好的参考依据。
[1]联合国.联合国海洋法公约[EB/OL].http://www.un.org/zh/law/sea/los/index.shtml.1982 -12 -10.
[2]国家海洋局.2010年中国海洋经济统计公报[EB/OL].http://www.soa.gov.cn/soa/hygbml/jjgb/ten/webinfo/2011/03/1299461294189991.htm.2011-03-09.
[3]李百齐,等.海洋战略与海洋管理研究[M].北京:中国文史出版社,2005.32.
LI Bai-qi,et al.Marine strategy and marine management research[M].Beijing:Wen Shi Express,2005.
[4]马坤,林焰,等.大连300吨级渔政船技术设计[R].大连:大连理工大学船舶CAD工程中心,2010.
MA Kun,LIN Yan,et al.The technical design of Dalian 300-tonnage fishery patrol[R]. Dalian: Ship CAD Engineering Center,School of Naval Architecture and Ocean Engineering,Dalian University of Technology,2010.
[5]马坤,林焰,等.山东300吨级渔政船技术设计[R].大连:大连理工大学船舶CAD工程中心,2011.
MA Kun,LIN Yan,et al.The technical design of Shandong 300-tonnage fishery patrol[R]. Dalian: Ship CAD Engineering Center,School of Naval Architecture and Ocean Engineering,Dalian University of Technology,2011.
[6]马坤,林焰,等.大连400吨级海监船技术设计[R].大连:大连理工大学船舶CAD工程中心,2011.
MA Kun,LIN Yan,et al.The technical design of Dalian 400-tonnage fishery patrol[R]. Dalian: Ship CAD Engineering Center,School of Naval Architecture and Ocean Engineering,Dalian University of Technology,2011.
[7]张明霞,林焰,等.大连45 m海域看护船技术设计[R].大连:大连理工大学船舶CAD工程中心,2011.
ZHANG Ming-xia,LIN Yan,et al.The technical design of Dalian 45m guard ship[R].Dalian:Ship CAD Engineering Center,School of Naval Architecture and Ocean Engineering,Dalian University of Technology,2011.
[8]中华人民共和国农业部渔船检验局.钢质海洋渔船建造规范(1998)[M].北京:国防工业出版社,1998.
Register of Fishing Vessel of People's Republic of China.Steel marine fishing vessel construction rules(1998)[M].Beijing:National Defence Industry Press,1998.
The regressive analysis of the principal dimensions of the fishery patrols based on single variable
LIU Fei1,LIN Yan1,2,LI Na1,YANG Qu1,WANG Yun-long1,SHEN Zhi-xin3
(1.Ship CAD Engineering Center,School of Naval Architecture and Ocean Engineering,Dalian University of Technology,Dalian 116024,China;2.State Key Laboratory of Structural Analysis for Industrial Equipment,Dalian 116024,China;3.Fishery Machinery and Instrument Research Institute,Chinese Academy of Fishery Sciences,Shanghai 200092,China)
The present situation and tendency of the fishery patrols of our country are analyzed in this paper.Based on the statistics of the fishery patrols principal dimensions data,the mathematical models of the principal dimensions are established respectively using the stepwise regression method,the BP Neural Networks Toolbox and the RBF Neural Networks Toolbox of MATLAB.By analyzing the results of the comparative results,the result of RBF model is proved to be the best.The results indicate that the models are reliable and available by verifying the models on fishery patrols.The variation of the principal dimensions of the fishery patrols is helpful in guiding the quote design and the compact design.
fishery patrol;principal dimension;mathematical model;regressive analysis;neural networks
U662.2
A
1672-7649(2012)07-0049-06
10.3404/j.issn.1672-7649.2012.07.010
2011-09-23;
2011-10-14
国家公益性行业科研专项:渔业节能关键技术研究与重大装备开发(201003024)
刘飞(1987-),男,硕士研究生,主要研究方向为船舶与海洋结构物设计制造。
