舰船综合导航系统多通道数据测试及精度评定系统*
2012-07-11樊勇华李京书
樊勇华 查 峰 李京书
(1.海军东海舰队司令部军训处 宁波 315122)(2.海军工程大学导航工程系 武汉 430033)
1 引言
舰船综合导航系统是舰船的重要导航装备,其综合了惯性导航系统、无线电导航系统、卫星导航系统等各系统的导航信息。综合惯导系统担负着为舰船航行和武器设备提供各种姿态、航向等导航信息的重要使命,其系统状态和精度直接影响舰船的安全航行和舰艇战斗力的发挥。因此,对综合导航系统的测试和状态评估是提高舰船综合保障能力的重要方向。
舰船综合导航系统包含的导航分系统繁杂,信息种类多,信息量大,测试难度大,且各系统信息的特点和误差特性并不相同,难以对系统状态和精度进行统一评定。目前,对于舰船导航系统的测试和故障检测主要通过对各分系统进行独立状态测试和故障诊断、预测。由于系统特点和误差特性,目前对舰船导航系统的状态测试、诊断主要集中在惯性导航系统上。相关文献对惯性导航系统的状态测试、性能状态评估进行了研究。文献[1]利用灰色理论和神经网络对陀螺的漂移数据进行了建模,文献[2]将小波变换引入灰色模型,对陀螺的漂移数据进行了建模和预测,取得较好效果。研究表明[3],陀螺电机故障为陀螺仪最主要的故障模式,直接影响陀螺仪的性能状态。陀螺电机的支承结构是影响其状态性能的关键因素[4]。在此基础上,文献[5~6]提出一种基于灰色神经网络的陀螺电机的状态预测模型。文献[7]提出一种基于卡尔曼滤波的BIT故障检测方法,提出采用双套惯性导航系统配置和GPS、计程仪组成容错组合导航系统来进一步提高系统的故障检测和隔离能力。
但是惯导系统组成复杂,影响其状态和性能因素较多,且惯导系统属于精密仪器,要从系统内部对其性能测试和数据采集势必影响系统正常工作,系统测试和评估困难。综合导航系统的输出数据包含了各分系统的导航信息,其分系统的输出反映了其系统状态,且各系统信息以串行接口的形式发送到综合导航系统中,其信息测试较为简单。为此,本文提出了一种基于串口输出数据舰船综合导航系统数据测试和精度评定系统设计方案。方案基于系统信息输出协议,以Labview为软件开发平台设计了舰船综合导航系统多通道数据采集及精度评定算法。实现对综合导航系统输出数据的实时、准确采集,为综合导航系统状态监测和性能评估提供数据支持。同时针对综合导航系统接收的导航设备信息种类和误差特性不同,利用采集的GPS卫星导航设备的速度、位置输出为参考,设计了惯导系统、计程仪等自主性导航设备精度评定算法,可以为惯导系统的性能状态提供参考。
2 系统组成
舰船综合导航系统包含的导航系统主要有:惯性导航系统,GPS、北斗等卫星导航系统,罗兰C等无线电导航系统,平台罗经、磁罗经等姿态和航向指示系统。各分系统的信息输出和特点不尽相同,系统误差也因各自模型不同而呈现出不同的特性。平台罗经、惯性导航系统等惯性系统,由于其惯性元件(陀螺仪和加速度计)存在着不可消除的误差,同时惯性器件存在安装误差,导致惯导系统在进行导航解算时,对惯性敏感元件输出的积分会导致惯导存在随时间发散的误差积累,因此惯导系统不可避免的存在随时间累积的姿态和位置误差。对于GPS、北斗等卫星导航系统,其系统精度较高,误差相对较为稳定,但因其需与外界进行信息交换,因此其系统输出容易受干扰。对于罗兰C无线电导航系统,一方面精度有限,同时其信息也易受干扰,因此一般作为惯性导航系统和卫星导航系统的备份。
综合导航系统各分系统的信息通过一定的通讯协议以串行接口的形式发送到系统显控部件。其各分系统信息能够反映各分系统状态和特点,同时利用卫星导航系统精度高,不随时间发散的特点,可以将其作为基准信息对惯性导航系统、无线电导航系统进行精度评估。针对综合导航系统的信息特点,构建的基于串口的系统多通道测试和精度评定系统组成如图1所示。

图1 综合导航系统多通道测试和精度评定系统框图
综合导航系统的各分系统将导航信息输出以RS422的形式发送到综合导航系统的显示和控制部件。通过综合导航系统的串行接口,利用串口/USB转换模块将RS422的信息输出转换为USB接口形式,输入便携式数据测试计算机。测试计算机利用设计的数据接收程序接收综合导航导航系统的导航信息,并根据相应的通讯协议进行误码判断,当确定数据接收正常后对数据进行解码,得到各导航分系统输出的导航信息。根据各系统导航系统的特点,利用GPS的位置和速度导航信息为基准,可对惯性导航系统等进行位置和速度精度评定。而由于综合导航系统中的姿态信息均有惯性系统提供,因此难以找到有效的姿态基准。因此姿态位置参考设备采用MS860型高精度测姿系统,该系统为美国Trimble公司开发的一款GPS接收机设备,可以为运动载体和平台提供精确的位置、航向、姿态和速度信息。MS860采用了Trimble公司专利的RTK(real-time kinematic)技术,利用接收的GPS位置信息进行运动载体姿态、航向和速度的精确解算[8]。同时系统采用全固态的电子设备和结构组成,没有运动和转动部件,可靠性和稳定性较高,无需定期进行维护和校正。文献[9]为了评估MS860型GPS姿态测量系统的性能,将其安装在某船上进行系统测,采用动态滤波的方法采集MS860姿态信息,同时同步采集某型平台罗经的数据,在此基础上,用误差统计方法评估姿态测量系统的精度性能。结果表明GPS姿态测量系统可以满足舰船姿态测量的需要,其航向的测量精度优于平台罗经系统。
MS860测姿系统的信息同样以串口形式输出,因此采用MOXA公司的UPort 1400系列串口/USB转换模块接口作为通讯接口硬件,实现多串口数据的转换和通讯。该转换模块可以使计算机或工作站通过USB(通用串行总线)与四个串行RS-232/422/485外设进行通信,并与任何型号的RS232/422/485设备兼容。转换模块具有四个串口,串口的通讯波特率最高可达到921.6Kbps,满足对过串口数据采集和精度评定的需求,而USB即插即用功能无需考虑IRQ,DMA或I/O地址资源,可以方便地实现串口的扩展,因此这一数据采集和通讯方案增加了系统的扩展性和便携性。
3 软件实现
Labview为美国国家仪器公司(NI公司)开发的一种应用于数据采集和测控的图形化语言。与传统的编程语言类似,LabVIEW也具有相似的数据类型、数据流控制结构、程序的调试工具等[10]。它与文本编程语言相比,最大的区别就在于LabVIEW利用各种图标、图形符号、连线、图形框架来编写程序,控制程序的流程。从而使得程序的开发者和工程技术人员不需要懂得繁琐枯燥的程序源代码,而只需要利用自己熟悉的术语、流程图来编写和开发程序,大大提高了工作效率。作为图形化编程语言的典型代表,Lab-VIEW简易的编程风格、强大的数据可视化分析能力、良好的可移植性和直观、友好的人机交互界面使之成为目前国际上应用最广的数据采集和控制的开发环境之一,主要应用于数据采集、分析和处理、仪器控制等领域,能够与多种不同的操作系统平台兼容。
3.1 软件算法流程
根据综合导航系统的测试需求,其测试和精度评定系统的软件的总体流程如图3所示。系统利用VISA configure serial port控件进行串口参数设置和初始化后,接收来自综合导航系统和MS860测姿系统的串口数据,采用LabVIEW中VISA read控件进行串口数据的读取。根据综合导航系统输入接口协议,数据以ASCII码的形式传输,因此程序接收的数据为ASCII码形式的字符串数据。数据测试程序在读取串口输出数据后,首先对字符串数据进行误码检测,确认数据传输无误后对数据进行相应解码。解码后可得到各分系统的导航信息的数字量,同时可得到MS860系统的姿态输出。根据各分系统的信息特点,将卫星导航系统的位置和速度信息作为基准信息,同时将MS860的姿态输出为姿态基准信息,进行惯导系统、罗经等惯性系统的精度评定。
根据上述算法流程,设计的综合导航系统测试和精度评定系统的程序如图4所示。
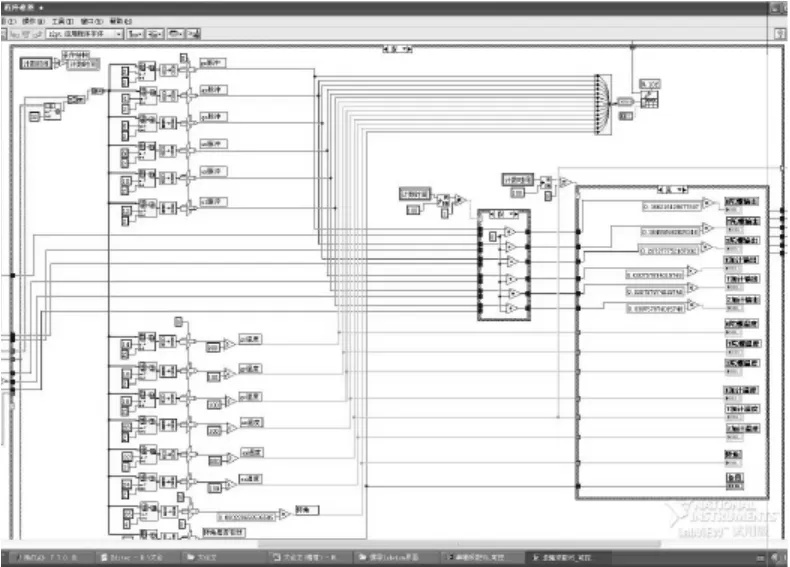
图4 综合导航系统多通道测试和精度评定系统框图
3.2 解码和误码检测算法
各分系统向综合导航系统的数据传输、采集等硬件通讯过程中,可能出现数据误码现象,产生的误码数据会对数据的解码和后续的精度分析带来影响,因此在进行串口读取后,因对数据传输进行误码检测,剔除乱码并舍去误码信息。
根据综合导航系统的接口协议,其输数据中包含了各分系统姿态、航向、位置、速度等大量的导航信息,该信息以ASCII码形式传输。由于舰船运动状态随时间变化,因此固定时间内发送信息并不是固定字长。在LabVIEW中,进行串口读写控件均为固定字长的读取,为了保证数据解码的准确性和实时性,应对系统的解码算法进行设计,根据接收的固定字长ASCII码对每次通讯接收的字符串信息进行处理和解码,保证每条导航信息的完整性。根据系统信息输出协议,传输的数据字头为系统代号,中间为数据段,数据段之间以空格分开,数据以回车符结束。每次输出一条数据的格式相同,但是字符长度不固定,因此根据相同的字头对输出数据进行识别和解码,串口每次读取最大可能字符长度来读取串口数据。将读取的字符以空格符识别后分别存入数组中,分别利用字头字符串和回车符对数组进行索引操作,实现了不固定字长数据的分条读取和解码。进行数
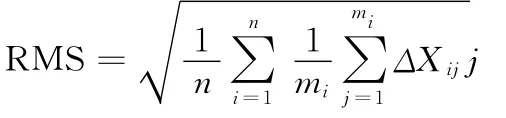
式中n为试验次数,mi为第i次试验的采样点数,ΔXij为第i次试验第j时刻的姿态或速度误差。
对综合导航系统的输出信息进行解码后,利用基准信息与被评定系统输出信息做差得到每次的试验误差。在进行误差计算前,应对数据进行预处理。精度评定统计计算的数据,应剔除因判读、传输、显示等错误造成的奇异点,本文采用Thompson方法剔除惯导系统输出的奇异点。利用LabVIEW数学控件模块中的数学运算等控件,实现了数据的Thompson方法剔除奇异点算法和精度评定算法。据解码后,利用相应的误码检测算法对数据段的数据进行检测,剔除乱码数据。检测算法利用校验码对解码后的字符串进行校验,若校验正确,则表示此次接收的数据无误。
3.3 精度评定算法
利用综合导航系统的卫星导航系统的速度和位置输出,以及MS860测姿系统的姿态输出为基准信息,可以综合导航系统内的惯导系统、平台罗经、计程仪等系统进行精度评定,判断各系统状态和精度。精度评定应依据国军标中的实验程序和规则进行。精度评定的关键是输出数据的精度分析和计算。以惯性导航系统为例,国军标规定系统,惯导系统位置精度评定有两种评价方法,一种利用径向误差率的圆概率半径衡量,另一种利用评定时间间隔内各时间采样点上的位置误差的圆概率误差半径的最大值作为评定标准,具体参见文献[11]。
除系统位置精度评定利用上述两种方法外,姿态误差和速度精度误差均采用误差的RMS值衡量,其值按如下式计算:
4 惯导系统测试和评定试验
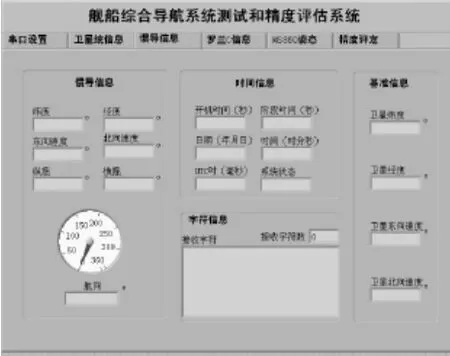
图5 系统软件主界面
根据软件的算法流程,基于Labview图形化软件卡法平台,设计了综合导航系统多通道数据测试和精度评定算法,实现了对综合导航系统各分系统数据的接收、解码、存储和精度分析与评定。系统进行测试及精度评定的主界面如图5所示。

图6 新型惯导系统试验现场照片
利用MS860测姿态系统获得舰船的姿态,同时基于综合导航系统的串口输出协议,搭建了多通道数据采集和精度评定系统。系统成功应用于某舰船综合导航系统的测试和数据采集试验中。同时,课题组在东海海域进行了某新型惯导系统的海试实验,图6为试验现场照片。左图所示,利用该数据测试和精度评定系统对同时试验的四台惯导系统进行了现场数据采集和测试,并以卫星导航系统的输出为速度、位置基准,以MS860系统的输出为姿态基准,进行了新型惯导系统的精度评定。右图为MS860型高精度GPS测姿系统的天线安装。在为期半年的实验过程中,系统运行可靠,数据采集完整,精度评定结论准确。
5 结语
针对综合导航系统信息种类繁多,信息量大的特点,构建了基于舰船综合导航系统多通道数据采集及精度评定系统。根据综合导航系统额信息输出协议,设计了数据解码和误码检测算法,实现了综合导航系统输出数据的实时、准确采集。针对综合导航系统各分系统的信息特点,利用解码得到的卫星导航系统的速度、位置输出为参考,以MS860测姿系统输出为姿态参考,设计了惯导系统、计程仪等自主性导航设备精度评定算法,对其精度进行了分析评定。系统成功应用于某新型惯导的精度评定海试试验,试验中系统运行可靠,数据采集完整,精度评定结论准确。
[1]卞鸿巍,李安,汪人定.用灰色理论和神经网络建立陀螺漂移模型初探[J].中国惯性技术学报,1997,5(4):37-40.
[2]樊春玲,高峰,孙四通.灰色模型的混合建模方法及其应用[J].中国惯性技术学报,2008,16(4):475-479.
[3]韦俊新,张俊,刘德均.浮陀螺仪可靠性技术分析[J].中国惯性技术学报,2004,12(4):57-59.
[4]査峰,胡柏青,金云翔.基于电压、转速信号的陀螺电机工作过程测试及性能研究[J].测试技术学报,2008,6(22):36-42.
[5]查峰,胡柏青,刘佳.基于灰色BP神经网络的陀螺电机状态预测[J].中国惯性技术学报,2010,18(1):120-125.
[6]ZHA Feng,HU Bai-qing,QIN Fang-jun.Prediction of gyro motor’s state based on grey model and BP neural network[C].Intelligent Computing Technology and Automation,Changsha:IEEE computer society,2009:87-90.
[7]徐茂俊,王荣颖.惯性导航系统基于卡尔曼滤波器的BIT故障检测方法研究[J].舰船电子工程,2010,1(18):120-123.
[8]Trimble Navigation Limited.MS Series Operation Manual IM].Ohio,USA:Trimble Navigation Ltd.,2001.
[9]钟斌.MS860动态测姿试验精度分析[J].海军工程大学学报,2003,3(15):46-49.
[10]National Instruments corporation.LabVIEW Function and VI Reference Manual[M].National Instruments corporation,1998:58-76.
[11]惯性导航系统精度评定方法[S].中华人民共和国国家军用标准,GJB729-89:1-11.
