水面舰艇平台防空作战能力指标体系与评估*
2012-07-11谭乐祖高传斌
陆 欣 谭乐祖 高传斌
(1.海军航空工程学院研究生管理大队 烟台 264001)(2.海军航空工程学院指挥系 烟台 264001)
1 引言
作战平台能力评估是装备论证的一项重要环节。平台评估指标体系是为平台的论证和研制、综合能力评估、优选系统参数而确定的层次化的准则和与方案相联系的属性集的总称。
水面舰艇的平台中心战中,全舰武器系统在舰载探测雷达的预警探测信息下,由作战指挥系统统筹全舰资源与来袭目标的关系,实施单平台作战。
2 舰艇单平台防空作战过程
舰艇单平台防空作战是利用舰艇对空预警探测系统实施对空情报搜集,再将搜集到的信息传送到舰艇指控中心后,经过信息处理、信息融合形成战场态势,并制定作战方案,最后形成作战命令指挥控制舰载武器系统完成对空作战任务。
根据舰艇平台作战过程知,舰艇平台作战体系由预警探测系统、信息传输系统、指挥控制系统、火力打击系统、电子对抗系统和其他保障单元组成的庞大的系统。
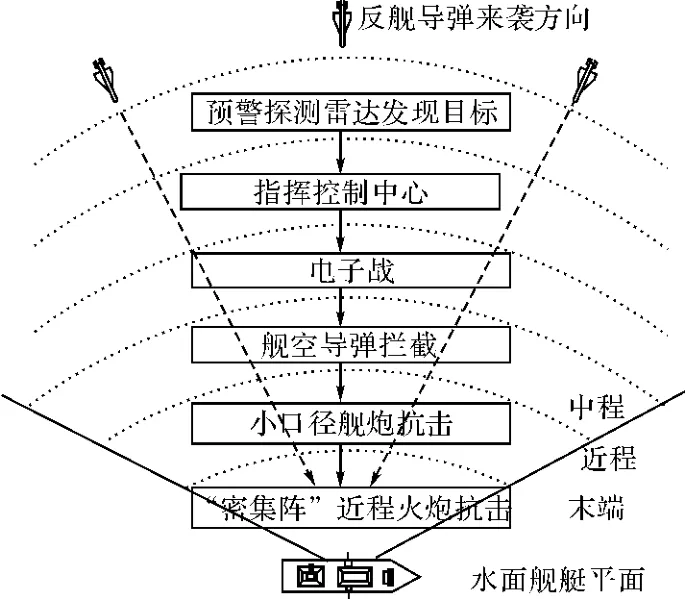
图1 舰艇单平台防空作战流程图
按照舰艇单平台防空作战过程的描述,把功能相似的单元放在一起,可把系统分为传感器、决策者、响应者及目标四个节点[1],节点间通过链路进行连接形成网络。传感器接收探测信息,并把这些信息发送给决策者;舰艇单平台对空传感器节点主要指舰载预警探测雷达。决策者节点接收来自传感器的信息,并就当前及将来其他节点的部署做出决策;主要包括舰艇作战人员、辅助决策支持系统等。响应节点接收决策者的指令,与其他节点相互作用,并影响那些节点的状态。响应节点对舰艇单平台防空系统来讲,主要包括舰空导弹武器系统、密集阵系统、舰炮系统等硬杀伤系统和电子干扰、诱骗干扰等软杀伤系统等。目标节点是所有具有军事价值的节点,但不包括传感器、决策者和响应者。综合舰艇单平台防空作战过程和节点与链路关系,在参考文献[2~3]的基础上,舰艇单平台防空作战系统功能结构可以用图2表示。
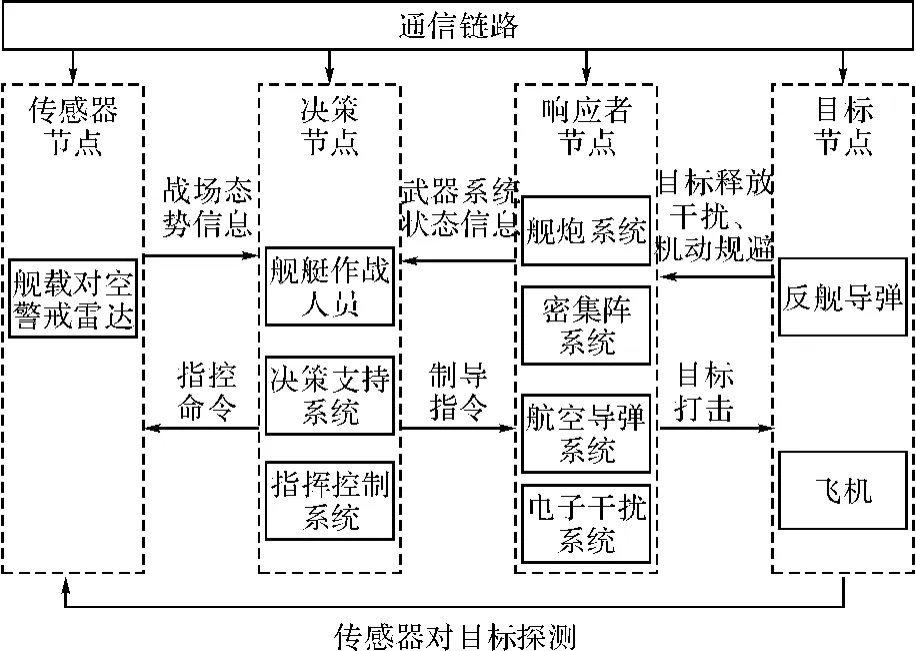
图2 舰艇单平台防空作战系统功能结构图
图中所有箭头指向是信息流向,代表节点间信息的交换传输,节点通过信息链路互相连接,形成舰艇单平台作战网络。
3 舰艇单平台防空作战能力指标体系
本文按照水面舰艇防空作战过程,以系统的传感器节点、指挥决策节点、作战武器三个节点的能力为一级指标层,对每一方面的能力进行剖析,建立如图3所示的多层次结构评价指标体系[2]。
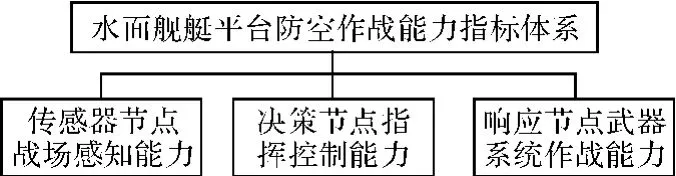
图3 舰艇单平台防空作战能力评估指标体系
3.1 传感器节点战场态势感知能力指标体系
在信息化条件下,无论战时还是平时,制信息权的争夺是最为激烈的,在战时它直接影响着战争的进程,在平时它是维护国家主权的重要标志。传感器节点对空战场态势感知能力主要指利用对空警戒雷达获取空中目标信息,尽可能早的为指控系统提供信息,实现先敌发现。因此,衡量对空战场感知系统作战效能的主要立足点在于分析传感器节点探测能力指标,如图4所示。
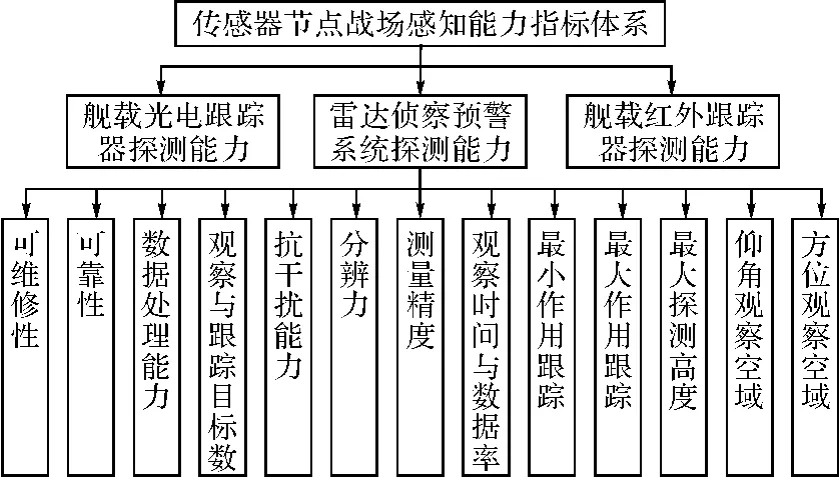
图4 传感器节点对空战场感知能力指标体系图
3.2 决策节点指挥控制能力指标体系
指挥控制能力主要描述作战平台的信息传输能力、武器控制能力、辅助决策能力、信息处理与融合能力以及指挥员的决策能力,建立指标体系如图5所示。
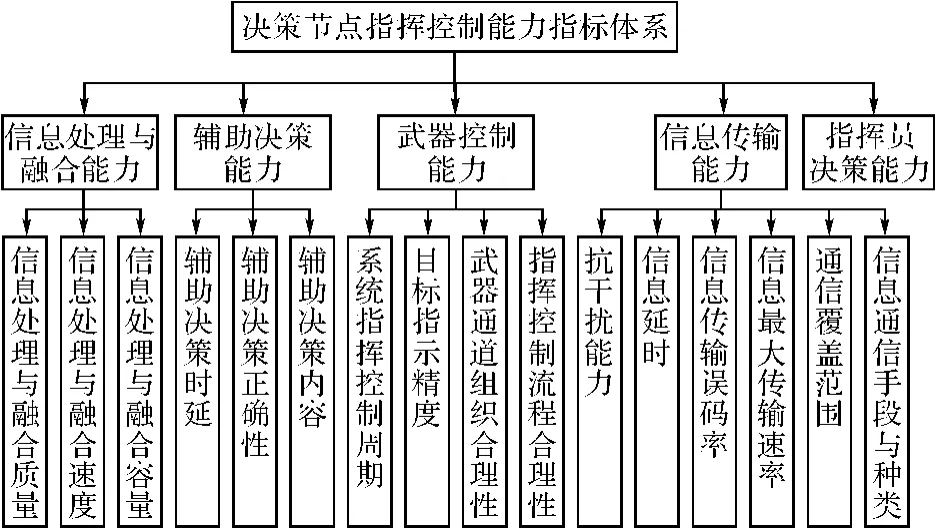
图5 决策节点指挥控制能力指标体系图
3.3 响应节点武器系统作战能力指标体系
传感器节点将目标信息传输给决策节点,再由决策节点输出指令给各种舰载武器系统,实施对敌火力打击或电子对抗。武器系统的作战能力是反映敌我双方装备直接对抗的情况,因此依据作战目标和装备的不同建立如图6所示的指标体系[4~6]。
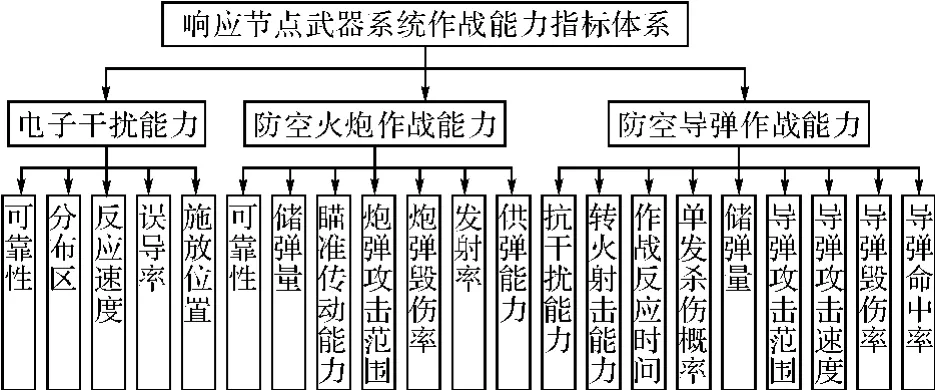
图6 响应节点武器系统打击能力指标体系图
4 舰艇单平台防空作战能力评估的方法模型
云重心是用语言值为某个定性概念与其定量表示间的不确定性转换模型,云的数字特征用期望Ex、熵En、超熵He表示,把模糊性和随机性完全集合到一起,构成定性和定量间的映射,作为知识表示的基础。所以,本文用云重心理论建立舰艇单平台防空作战能力评估模型,具体操作步骤如下[7~9,12]:
1)确定评估的指标体系
假设评估指标体系U,有U={U1,U2,…,Um},其中,Ui(i∈[1,m])是目标U的第i个指标;Ui={Ui1,Ui2,…,Uis},Uij(j∈[1,s])是Ui的第j个指标;Uij={Uij1,Uij2,…,Uijk},Uijt(t∈[1,k])是Uij的第t个指标。依次类推,确定多层指标结构。
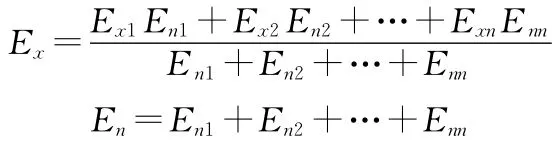
2)求各指标的云模型表示
在系统能力指标体系中,既有精确数值表示,又有语言值描述。在德尔菲法基础上提取n组样品组成决策矩阵。则n个精确数值表示的指标可用一个云模型表示。其中


同时,每个语言值的指标也可用一个云模型表示,则n个语言值(云模型)表示一个指标可用一维综合云表征。其中,
3)用一个p维综合云表示p个性能指标的系统状态。
p个性能指标可用p个云模型来刻画,则p个指标所反映的系统状态可用p维综合云表示。当p个指标所反映的系统状态发生变化时,其形状也发生变化,其重心随之改变。该重心T用p维向量表示。即:
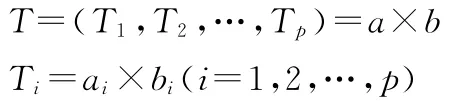
其中,a、b为云重心位置和高度。
当系统状态发生变化时,其重心变化T′为

4)用加权偏离度衡量云重心的改变
系统理想状态下,各指标值为已知。设p维综合云重心位置向量为a=,,…,);高度向量为b=(b1,b2,…bp),则理想状态下云重心向量T0=a×bT=(,…,)。同理,求某一状态下系统的p维综合云重心向量T=(T1,T2,…,Tp),可用加权偏离度(θ)来衡量两种状态下综合云重心的差异情况。先将此状态下的综合云重心向量进行归一化,得到一组向量:TG=(,…,)。其中
=,经归一化,表征系统状态的综合云重心向量均为有大小、有方向、无量纲的值,其向量为(0,0,…,0)。把各指标归一化后的向量值乘以其权重值,相加得到加权偏离度θ(-1<θ<0)值。
wj为第j个单项指标的权重值。
5)用云模型实现评测的评语集
讲各级评语置于连续的语言值标尺上,并用云模型来实现,构成一个定性评测的云发生器。如图7所示[5]。
6)多重云的处理
对于多层次系统,则由底层向上递推计算上一层指标的评价结果,依各得分值,再向上递推直至目标层。
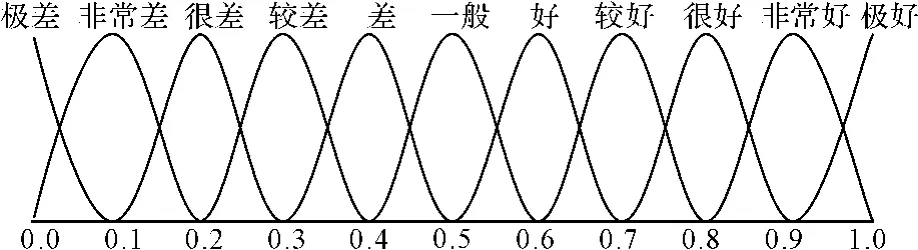
图7 云发生器模型
5 结语
水面舰艇单平台防空作战能力涉及到很多因素,有些因素是定性的、有些因素是定量的,给评估工作带来了困难。本文采用的云重心评估法体现了定性与定量之间的不确定转化,为以后此类问题的研究提供了一定的参考价值。
[1]Jeff Cares,于全[译].分布式网络化作战—网络中心战基础[M].北京:北京邮电大学出版社,2006:65-70.
[2]杨立峰,代进进,李相民.舰艇编队网络化反导作战指挥体系研究[J].海军航空工程学院学报,2011,26(4):457-460.
[3]陈康,罗雪山,罗爱民.CEC条件下的舰艇编队防空问题[J].火力与指挥控制,2006,31(4):32-35.
[4]曹珺,王巨海,杨文林,等.云重心理论在防空C3I系统效能评估中的应用[J].兵工自动化,2007,26(1):16-18.
[5]甄涛,王平均,张新民.地地导弹武器作战效能评估方法[M].北京:国防工业出版社,2005:246-259.
[6]罗金亮,王玺.防空导弹网络化作战体系结构及效能评估[J].战术导弹技术,2011(5):15-17.
[7]武文军,成洪俊,曹宁.云重心理论在防空兵作战能力评估中的应用[J].火力与指挥控制,2005,30(4):82-84.
[8]肖丁,赵金超,陈勇.基于云重心理论的单舰防空作战能力评估[J].现代防御技术,2011,39(5):30-34.
[9]李德毅,孟海军,史雪梅.隶属云和隶属云发生器[J].计算机研究与发展,1995,32(6):15-20.
[10]姚跃亭,赵建军,尹波波,等.舰艇编队防空目标分配优化算法研究[J].计算机与数字工程,2011(1).
[11]李云芳,万晓冬.基于Agent的HLA空防对抗仿真系统研究[J].计算机与数字工程,2012(1).
[12]陈晨,王强,王晓恩.基于云重心评价法的空袭目标威胁程度评估[J].计算机测量与控制,2009,17(2):
354-356.
