基于遗传算法的远程鱼雷航路规划*
2012-07-11吉春生
毛 钰 吉春生
(海军潜艇学院 青岛 266042)
1 引言
所谓远程鱼雷,是指航程在百公里或者百公里以上,具有可控引信,能够智能制导和远距离探测的重型鱼雷[1]。与一般意义上的鱼雷相比,远程鱼雷具有攻击距离远,可预先投放等特点,从而可以实现以兵器机动代替发射平台机动,可对平台难以或无法接近敌区域进行攻击,同时也提高了发射平台的安全性[2]。由于远程鱼雷这些特性,就需要进行从发射点到目标位置区域的全程航路规划,选择一条从起点到终点的能够避开障碍物的最优航行线路,才能最大化的发挥鱼雷的作战效能。
现阶段航路规划有很多种算法[3],如:动态规划法、神经网络法、模拟退火法、最优控制法、启发式搜索法、遗传算法、蚁群算法等等,各种算法各有其优缺点,算法的优劣主要取决于算法的快速性、算法求出解的最优性。本文运用遗传算法,综合考虑航路距离和航路安全性,对远程鱼雷的航路进行规划,并对算法进行了计算机仿真。
2 远程鱼雷航路规划
2.1 远程鱼雷航路规划的基本含义[4]
远程鱼雷航路规划,是指在综合考虑作战任务、敌目标基本性能及运动要素、远程鱼雷基本性能、作战海区相关情况和航行时间等各种约束因素条件下,找到一条从起始点到目标点的最优或最佳的可行航行轨迹。远程鱼雷航路规划也称任务规划,是指挥员根据作战目的、战场情况和敌方舰艇的机动能力,选择鱼雷从发射出管后到预定目标点的最优航路的规划方法,从而为指挥员实现各种战术意图提供良好的技术支撑。随着鱼雷航程的不断增大,航路规划在远程鱼雷的作战运用中起着越来越重要的作用。该规划包括选定鱼雷航向、航速、航路点及末段自导方式,通过合理设置鱼雷的航路规划点,指挥员可以对目标实施多方向攻击和饱和攻击,或通过绕过敌方的严密防空区提高鱼雷的命中能力,实施隐蔽攻击。目前,潜射远程鱼雷具有航路规划功能,在鱼雷航程及战场态势允许的情况下,潜艇指挥员可根据战术意图及战场态势,灵活设定鱼雷的航路点,以充分发挥鱼雷的作战效能。
2.2 远程鱼雷航路规划的特性
与其他鱼雷武器相比,远程鱼雷作为一种新形势下产生的信息化武器,通过航路规划具有一定的特性[4~5],主要有:
1)“火力机动”攻击能力。可以设置多个航路点,以“火力机动”代替“兵力机动”对目标实施多方向、多航路饱和攻击,攻击时可以避开岛屿、敌方兵力密集区,增加武器的突防能力。
2)发射平台及鱼雷的隐蔽性提高。远程鱼雷经过各个航路点转向后可从敌目标意想不到的方向发起攻击,不仅提高了攻击的突然性,减少了敌抗击时间,而且攻击方向与发射平台的位置没有必然的联系,敌方很难通过攻击方向判断出发射平台的概略位置,有利于兵力的隐蔽行动。发射平台可以充分利用岛岸等有利地形为掩护,或者在我方兵力控制范围内发射远程鱼雷对目标实施火力机动打击,有效提高攻击的隐蔽性和攻击兵力的生存能力。
3)对信息的需求更高。由于鱼雷航程、航时的加大,鱼雷的发射出管后,需要相关指挥机构进行精确导引定位,并适时进行信息的传递,保障鱼雷能安全到达攻击区域,从而对目标实施攻击。
3 遗传算法应用条件及概述
3.1 应用条件
在用该算法做航迹规划时,本文有以下假设:
1)远程鱼雷通常由发射平台发射,然后进入一定深度自主航行,因此航路规划可以建立在二维平面的基础上。
2)远程鱼雷的环境威胁主要考虑岛礁、码头等障碍物的威胁。根据各自相应的形状特点,可以将岛礁码头等障碍物简化成规则图形表示的威胁区域。通过对威胁的简化处理,得到相应深度的威胁分布平面,在此基础上进行航路规划。
3.2 算法概述
遗传算法(Genetic Algorithm,GA)是模拟自然界生物进化机制的一种算法,即遵循适者生存、优胜劣汰的法则,也就是寻优过程中有用的保留,无用的则去除。在科学和生产实践中表现为,在所有可能的解决方法中找出最符合该问题所要求的条件的解决方法,即找出一个最优解[6]。本文在算法设计中提出一种基于Voronoi图的遗传优化算法
1)首先根据已知的威胁分布情况,构造出威胁及障碍分布的 Voronoi图[7];
2)根据威胁及障碍边界点,得出基本航路集合;
3)在Voronoi图的基础上,用遗传算法计算得出最优航路。
4 算法的描述
4.1 Voronoi图的构造[7~8]
综合考虑远程鱼雷从发射出管后到目标位置区域整个航行过程中可能航路的地域威胁和障碍发布,构造出威胁及障碍分布的Voronoi图,如图1所示。
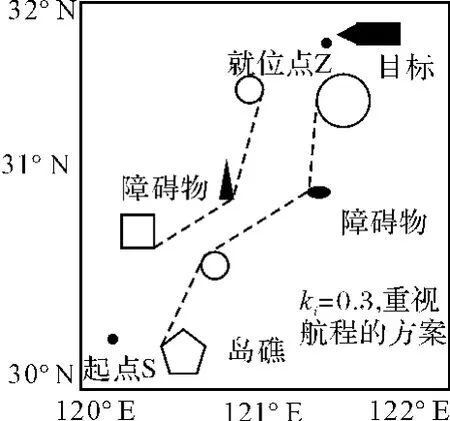
图1 威胁及障碍分布Voronoi图
图中,S为起点,Z为终点,阴影部分为威胁分布区域,图中虚线即为Voronoi边,连接出发点到就位点的这些Voronoi边的组合,中间构成基本航路集合。Voronoi图的中间点构成基本路径的转弯点,即中途主要的航路点。路径规划的任务是找出从出发点到目标点鱼雷能回避敌方威胁,安全到达攻击区域。可以看出,通过构造Voronoi图,将路径规划问题从多维空间的搜索问题简化到二维空间搜索的问题,即路径规划只要在Voronoi图所确定的路径集合中进行,避免了直接使用遗传算法求最优解的盲目性,可以较容易的找出局部最优解,克服了遗传算法局部寻优能力不足的特点,提高了计算效率。
4.2 使用遗传算法进行路径选择[11~13]
4.2.1 编码
算法的编码方式,直接关系到算法的可行性和效率。本文对远程鱼雷的航行区域在Voronoi图的基础上采用坐标系表示。定义航路的起点S为坐标的原点,起点和终点的连线为横轴,其垂线为纵轴。这样,在Voronoi图所确定的路径集就都可以表示成由若干个坐标系上的点组成。假设航路上的航点为S,S0,S1,S2…Si…Z,其中S,Z分别为起点和终点,不参与编码。Si为第i个航点,i=1,2,3,…N。这样航线上的某个位置点就可以表示为坐标点。

取各障碍物的边角为临界区域点,就可以避免鱼雷航行中与障碍物和威胁区域接近发生碰撞。选Mi作为基因值,则M1,M2,M3,…MN为一个染色体。
4.2.2 适应度评价函数
遗传算法中,计算得到的结果是通过适应度评价函数来进行评价的,因此适应度函数的确定就是将航路规划时的因素和要求包含进去。适应度评价函数决定了最优解的要求和算法的收敛性,这里采用的适用度评价函数包含的航路安全系数和航程[5]。
安全系数主要考虑鱼雷在航行中能否避开障碍物或威胁区域,假设障碍物是圆形区域,半径为r,航路到障碍物中心点的距离为d,则安全系数可表示为

适应度评价函数可以表示为

式中,L定义为航路总航程;Mi,i+1定义为位置点Mi到Mi+1之间的距离;ki定义为安全系数,介于0~1之间,当ki越趋于0,安全性越低,也就是航路越靠近威胁区域;反之,越趋近于1,安全性越高,但航程越大。
5 计算机仿真
通过算法设计,采用VC语言进行仿真计算,考虑ki的取值,分别选取不同的安全性和航程。算法采用三个基本遗传算子:选择,交叉和变异。设定的仿真参数为:群体大小=200,进化代数为200,交叉概率=0.7,变异概率=0.1。仿真结果如图2及图3所示:

图2 重视航程的方案

图3 重视安全性的方案
6 结语
随着鱼雷航程的不断加大,航路规划问题将成为提高鱼雷作战效能的一个重要环节。本文提出了基于Voronoi图的遗传优化算法,对远程鱼雷这型信息化武器的航路规划问题进行了初步探讨,通过仿真结果证明,这个算法设计是可行的,便于远程鱼雷的优化控制和实时航路规划,有利于进一步的研究。
[1]李本昌,梁涛.远程鱼雷的作战样式及其技术需求[J].鱼雷技术,2008,16(4):54-57.
[2]顾险峰,钱建平.鱼雷武器远程精确打击导引模式和技术架构初步探索[J].舰船科学技术,2003,25(3):7-10.
[3]周彬彬,王学伟.无人机航路规划问题初步研究[J].中国西部科技,2011,10(4):32-34.
[4]龙飞.航路规划技术对反舰导弹攻击影响的探讨[J].飞航导弹,2005,12:26-28.
[5]沈建锋,许诚.遗传算法在反舰导弹航路规划中的应用[J].飞行力学,2005,23(3):52-55.
[6]李华昌,谢淑兰,易忠胜.遗传算法的原理与应用[J].矿冶,2005,14(1):87-90.
[7]王晓东,廖士中.基于Voronoi图的定性路径[J].计算机工程与应用,2009,45(21):193-196.
[8]刘钢,老松杨.反舰导弹航路规划图形化快速逆推方法[J].弹道学报,2011,23(2):52-56.
[9]肖支才,程春华.基于改进遗传算法的反舰导弹协同任务规划[J].计算机与数字工程,2010(5).
[10]巩固,郝国生,杨帆.一种改进的抑制早熟收敛的遗传算法[J].计算机与数字工程,2009(5).
[11]罗翔,陈戈.基于遗传算法的自航水雷航路规划[J].火力与指挥控制,2009,34(3):99-101.
[12]郑锐,冯振明.基于遗传算法的无人机航路规划优化研究[J].计算机仿真,2011,28(6):88-91.
[13]徐剑,周德云.基于改进遗传算法的多无人机路径规划[J].航空计算技术,2009(4).
