基于信息融合的实时数据处理方法应用*
2012-07-11黄越平陶爱科刘小军
黄越平 陶爱科 苏 涛 刘小军
(95972部队 酒泉 735018)
1 引言
多传感器数据融合(Multi-Sensor Data Fusion,简称MSDF),是指对来自多个传感器的数据进行多级别、多层次的处理,从而产生新的有意义的信息,而这种新信息是任何单一传感器所无法获得的(就是将来自多个传感器或多源的信息进行综合处理,从而得出更为准确、可靠的结论)。目前,多传感器信息融合技术已成功地应用于机器人、智能仪器系统、图像分析与理解、战场任务与无人驾驶飞机、目标检测与跟踪、自动目标识别、多源图像复合等众多的研究领域,尤其是在C3I领域,在世界上几次局部战争中,信息融合显示了强大的威力。在军事领域,信息融合主要包括检测、互联、关联(相关)、状态估计、目标识别、态势描述、威胁估计、传感器管理和数据库等。
为了提高某指挥控制系统的总体性能指标和战术技术指标,解决指控系统态势混乱、指挥员难以决策、安全控制要求高、数据引导困难、难以实现多目标跟踪、不同试验任务难以同场次进行的问题,需针对航空武器试验、合同训练任务的特点和要求,结合各类测量设备的性能特点,运用信息融合处理技术,在数据滤波和航迹拟合等方面提高水平。用于指控系统多传感器多目标探测信息的互补,实现多测量设备信息的融合,提高目标跟踪的信息质量和目标探测的精度,提供高质量和高可靠度的合同训练和试验的环境态势。
2 总体设计研究内容
概括起来讲,本应用系统设计是根据某指挥控制系统的实际要求,针对试验和合同训练的不同特点,确定适用于不同条件、不同任务的信息融合方案与模型,并完成模型的模块化,嵌入指控系统的应用软件中。研究内容主要包括:
1)数据处理数学模型
2)数据融合模型
3)实测数据仿真及模型正确性检验
2.1 设计指导思想
数据融合模型及软件设计遵循以下原则:
1)具有高可靠性
2)具有可扩充性和可重用性
3)具有独立性
4)与应用软件的接口设计合理
2.2 体系结构与流程
系统设计信息融合功能为两种方式,其一为利用测控系统已处理的航迹信息;其二为直接对传送至指控系统的传感器原始量测信息进行融合处理。这两种处理方式从结构上分别对应于多传感器信息融合中的混合式和集中式融合结构。
从测控站传送到指控中心处理器的航迹信息,精度和可靠性(经数据融合处理)都很高,但有约5ms的延迟,此航迹信息作为备份,采用混合式融合结构。
对于应用系统信息融合问题,主要考虑惯导、GPS、遥测、RCS测量、多部警戒雷达和航管二次雷达信息等信息源与测控站雷测信息的融合及综合处理问题。雷测、RCS测量、遥测、GPS、惯导等信息源的数据经过统一的时间对准、坐标变换、野值剔除和降噪处理等预处理后进行数据压缩,采用集中式融合结构。
多部警戒雷达和航管二次雷达信息数据率低,异步传输,它们的融合按“不同维异步信息”的数据融合方法处理,不进行时间对准也不进行野值剔除,而单独进行数据融合处理,用以形成指挥控制全空域的环境态势,主要担负监视、警戒和报警任务,不参与指控系统试验航迹的数据融合。
3 多传感器融合算法模型
根据应用系统和融合结构的不同,融合算法模型有所不同,需要采用不同数据融合处理过程,在本系统中,融合处理系统要分析来自所有传感器的数据,并对其进行空间与时间配准、数据关联、航迹相关、航迹融合、航迹滤波等。主要包括多传感器时空校准、航迹起始、点迹/航迹互联、数据压缩、航迹保持、机动目标跟踪、航迹融合、建模与模型参数的设置、航迹滤波等。
3.1 多传感器时空校准
多传感器在时间上和空间上对准是对不同种类、不同精度、不同数据录取率的传感器如何在时间上和空间上对准。本系统运用“自回归求和滑动平均模型”(ARIMA模型)进行数据的合理性连续性检验;运用连续滤波门限、多层次滤波结构等多项雷达情报处理技术进行合理内插外推;泰勒展开修正法修正观测数据的时间;采用GPS信息时延弥补、不同量测坐标系转换修正、各传感器系统误差修正,保证测量数据在时间上和空间上的对准。
3.2 航迹起始
当检测到新目标出现后,需要利用新目标的量测信息起始航迹。多部警戒雷达和航管二次雷达信息作为一个相对独立的单元单独进行融合处理,我们称融合后的航迹为全空域系统航迹;其它设备作为一个整体,它们的系统航迹称为局部系统航迹。对可靠单目标型传感器,可以利用其提供的平台位置速度信息,直接起始航迹,并作为局部系统航迹。它们的ID号与局部系统航迹号之间在一次任务期间存在永久对应关系;对多部精测雷达,如果目标点迹不与任何已起始的局部系统航迹相关,则利用该目标的测量序列起始新航迹。
3.3 点迹/航迹互联
点迹/航迹互联的过程是将候选回波(跟踪门规则的输出)与系统航迹相比较,并最后确定正确的点迹/航迹配对的过程。主要针对多部精测雷达雷测设备的测量信息。
假设航迹在k时刻状态估计信息为(k|k),k+1时刻获得目标雷达测量信息通过坐标变换,得到目标在融合中心直角坐标系下的测量值为X(k+1)=[xk+1,yk+1,zk+1]。首先,利用k时刻目标状态估计信息预测其k+1时刻目标状态信息:

如果下面公式成立:
则认为雷达的测量信息与该航迹互联,否则,判定该点迹信息不属于此条航迹。(根据以往的实践经验,n的取值可控制在3~5)。
3.4 数据压缩
在本系统应用中采用集中式多传感器融合方法需要将多传感器数据组合成类似单传感器的数据进行处理。假设同一目标同一时刻的定位信息源有:,相应的量测误差为:
3.5 航迹维持
航迹维持,又称为航迹滤波,主要是指如何保持对目标进行连续的跟踪,而不丢失目标。这里采用Kalman滤波方法。
设目标量测信息经数据压缩和坐标转换后,在直角坐标系中表示Z(k)= [xyz]′。由于导弹目标和其它目标起始系统航迹所建立的系统状态方程不一致,因此,导弹目标的状态向量表示为z¨],其它目标状态向量表示为
其中x、y、z分别为目标在直角坐标系下的X轴、Y轴和Z轴的位置。假设在k时刻系统航迹的估计和状态协方差分别为(k|k)、P(k|k);在k+1时刻获得与该航迹相关的量测为Z(k+1),则通过以下步骤获得航迹在k+1时刻的状态估计和状态协方差:

其中(k+1|k)为状态的一步预测;P(k+1|k)为一步预测协方差;(k+1|k)为预测量测;S(k+1)为量测预测协方差;W(k+1)为滤波增益。
3.6 机动目标跟踪
当目标发生机动时,需要采取相应的措施以使系统能够正确跟踪该目标。目标机动处理方法采用可调白噪声方法。
首先,系统需要对目标是否机动进行检测。简单的检测方法是基于归一化的新息平方:

当εv(k+1)超过某门限时,则判定目标发生了机动。对于不同的目标,其门限的大小是不一样的。因此,门限选取也需要根据设备的实测数据,进行大量的仿真才可以最终确定。门限的选取原则主要根据目标可能的最大机动指标来确定。
目标的机动处理主要是增大Kalman滤波方程中的过程噪声协方差Q(k+1),从而增大一步预测协方差P(k+1|k),增大量测预测协方差S(k+1),直到εv(k+1)减小到门限以下。Q(k+1)的调整主要通过调整其中的比例系数q。
3.7 航迹融合
雷测设备的测量点迹(或测量序列)经过滤波,得到目标航迹,此目标航迹需要和可靠单目标型传感器的航迹信息进行融合,得到最终的目标航迹信息。另一方面,当指控中心选取混合式工作方式时,也需要进行航迹/航迹融合。
1)最优航迹合成解
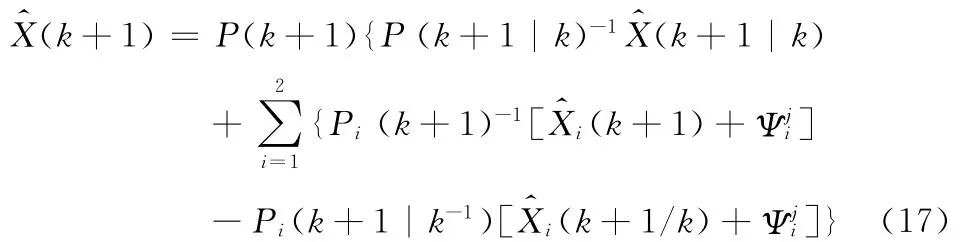
其中,

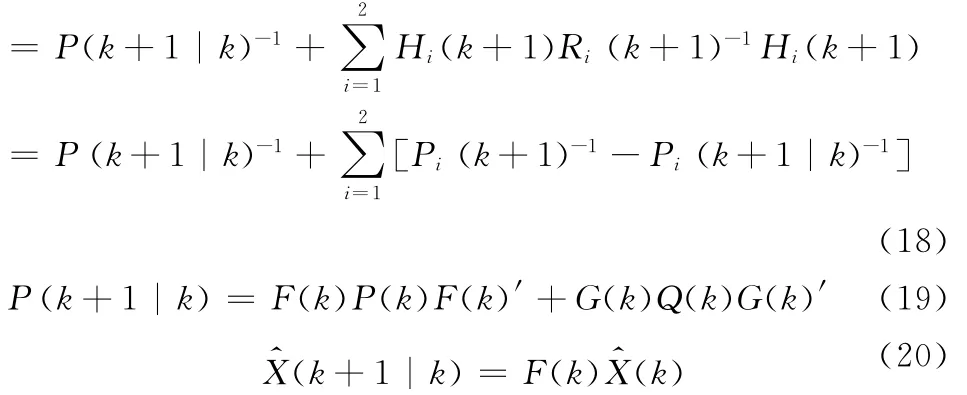

Pi+1|k)(i=1,2)分别为来自指控中心和测控中心同一目标的状态估计。
2)次优航迹融合解
当不考虑过程噪声和初始条件的影响时,次优航迹融合解可表示为
3.8 建模与模型参数的设置
模型的一些参数的设置是一个难题,通过事后测量原始数据机下仿真分析,模型的一些参数的设置采用事后测量原始数据机下仿真的经验值、人工干预调整;实时积累观测数据对未知或不准确的系统模型参数及噪声特性进行估计及修正,实时自适应模型参数调整,实现对不同种类、不同精度、不同数据录取率的传感器模型参数的自适应实时调整。
3.9 针对传感器数据率和精度特点的数据滤波方法
结合各类测量设备的性能特点,运用多阶泰勒级数拟合残差法实现测量数据处理动态方差预估计,弥补了模型理论推导的初始状态估计、初始状态估计协方差矩阵和测量信息误差方差计算公式的不足。克服了传感器精度差异大、短时连续漏测、成片野值等问题对数据处理精度和稳定性的影响。
4 应用结论
将信息融合算法模型嵌入实时并行计算数据处理系统中,用于指挥控制系统多传感器多目标探测信息的互补,实现了指控系统多测量设备信息的融合,提高了目标跟踪的信息质量和目标探测的精度,为指挥员提供高质量和高可靠度的合同训练和试验的环境态势,有效保证了目标点迹(航迹)的实时性、准确性、连续性、平滑性,为航空武器试验的边界条件产生、指挥员的决策提供直观显示和可靠依据,使指挥控制界面态势清晰、便于指挥决策、便于安全控制,解决了由于多传感器跟踪同一目标时,因各传感器精度、数据采样率不同而造成的航迹混乱的现象;解决了飞机编队起飞、大空域机动、空中编队和交叉飞行等复杂状态下的跟踪和态势显示问题;解决了指测控数据引导困难、难以实现多目标跟踪及不同试验训练任务同场次进行的问题。
将本系统推广到现代化的军事指挥控制系统,以信息融合为核心保证数据配批解算、设备引导平滑、稳定、连续、准确,对提高军事指挥控制系统自动化程度和可靠性具有重要意义,同时也是半实物仿真、战术对抗评估等任务的前期基础性工作。应用信息融合技术可大大提高作战指挥系统的性能,经适当改造,可推广用于其它合作环境下的多目标跟踪系统(如空中交通管制)和非合作环境下的多目标跟踪系统(如防空监视与预警)中。
[1]康耀红.数据融合理论与应用[M].西安:电子科技大学出版社,1997.
[2]何友,王国宏,彭应宁,等.多传感器信息融合及应用[M].北京:电子工业出版社,2000.
[3]汪叔华.最优滤波与应用[M].南京:航空航天大学出版社,1998.
[4]何友,陆大琻,彭应宁.多传感器数据融合算法综述[J].火力与指挥控制,1996(21):14-16.
[5]白欣,宋博,左继章,等.高可用性冗余实时集群系统的设计与构建[J].计算机工程,2004(30):25-26.
[6]黄晓斌,张燕.雷达数据处理中观测数据坐标变换补偿方法分析[J].空军雷达学院学报,2010(01):15-21.
[7]何友,关欣,王国宏.多传感器信息融合研究进展与展望[C].宇航学报,2005,26(4):524-529.
[8]A.K.Singh,N.Sood.Modelling and Simulation of Multi-target Multi-sensor Data Fusion for Trajectory Tracking[J].Defence science journal,2009,59(3).
[9]Karim Salahshoor,Mohsen Mosallaei,Mohammadreza Bayat.Centralized and decentralized process and sensor fault monitoring using data fusion based on adaptive extended Kalman filter algorithm[J].Measurement,2008,41(10).
[10]Andrzej Stateczny Witold Kazimierski.A Concept of Decentralized Fusion of Maritime Radar Targets with Multisensor Kalman Filter[J].International Radar Symposium (IRS 2010)11th,2010.
