水下高速目标多传感器联合谱特征分布识别方法
2012-07-11江向东
江向东
(水声对抗技术重点实验室,中国船舶工业集团公司船舶系统工程部,北京100036)
水下高速目标多传感器联合谱特征分布识别方法
江向东
(水声对抗技术重点实验室,中国船舶工业集团公司船舶系统工程部,北京100036)
单传感器探测频段在目标识别具有一定的局限性。探讨利用多频段传感器进行联合判定的思路,包括利用航迹联合关联、特征优化综合和联合识别的方法。
矢量水听器;目标分类
0 引言
高速目标识别是进行软硬对抗的前提,目标识别可利用的资源包括各声呐跟踪目标的LOFAR谱、DEMON谱、目标方位能量信息、目标运动分析信息和目标脉冲侦察信息等。其中,目标运动分析信息与目标高速特征直接相关,但是受到解算时间的影响,经常无法满足识别的实效性要求,且对于水下高速机动目标,其运动轨迹与假设模型相差较大。基于方位能量,但是受到相对态势的影响,只能作为辅助因素之一。综合各种因素进行联合识别是水下平台识别高速小目标的发展趋势。但目标探测跟踪的不同阶段,需要有较为可靠的方法作为主识别器,再辅以上述各种信息进行加权综合。由于频段差异和平台噪声的影响,利用LOFAR谱识别难度很大,准确率低,因此基于DEMON谱的识别是目前较为可靠的途径。目前,水下平台对于目标的识别尚局限于单传感器探测频段的识别,没有充分利用多个频段之间的互补性。本文探讨利用多传感器探测信息进行联合识别的思路,包括利用特征优化综合和联合识别的方法等。
1 多传感器多频段联合识别
1.1 基于历程的目标关联
对目标进行联合识别的首要问题是目标关联,否则就失去了联合识别的基础,对于水下平台,2部壳体传感器的位置相近,对于远程目标如果目标一致,则方位线走向基本一致,其方位线之间的差别主要来自位置差异和探测误差。对于近处目标,安装位置的差异影响变大。假设传感器阵中心之间的位置差为D=30 m,目标距离为d,当目标从远及近高速运动时,由于距离的变化引起探测方位不一致性,在500 m范围外,方位差保持大约小于2°,低于传感器最小分辨角度,可进行历程关联。方位历程关联可采用最近邻法,采用方位差序列均方差判定,即时间T内,2个传感器对跟踪目标的方位测量差序列的均方差。判定门限需考虑2种误差,由于传感器安装位置不同带来系统误差和探测方位误差。例如在5 000 m范围内,系统误差小于2°,探测误差假设2个传感器误差小于1°,则判定2个目标方位走势一致的门限值可取3°,小于3.4°认为是同一个目标。
T的选择,航迹历史选择较短时间时,关联错误的风险增加。方位历程关联是比较目标相对2个传感器方位走向趋势的异同,T至少需要大于30 s,以便于区分特殊态势下并行多目标问题。对于非并行目标,通过选择合适的统计时间T可区分,对于水下高速目标,与其他目标在较长时间内方位线并行的概率较低。
1.2 多频段谱特征优化和提取
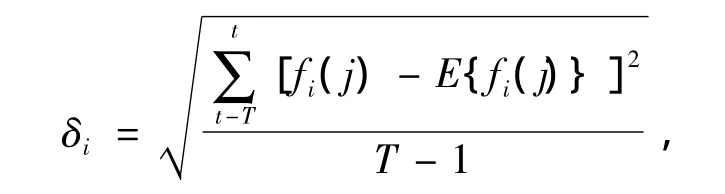
多频段DEMON谱优化的原理为:对于幅度大于一定门限的谱线,取多个传感器DEMON谱中幅度最大的作为优化谱对应频率的幅度,小于门限的取最小幅度或者设置为0,并依据超过幅度门限的传感器个数进行加权处理,对于M(大于2)个传感器情况,如果有m个传感器的DEMON谱的幅度在该频点超过门限,则该频点加权幅度为m/M。优化后,可得到不同传感器最为明显的线谱成分,有利于特征提取。
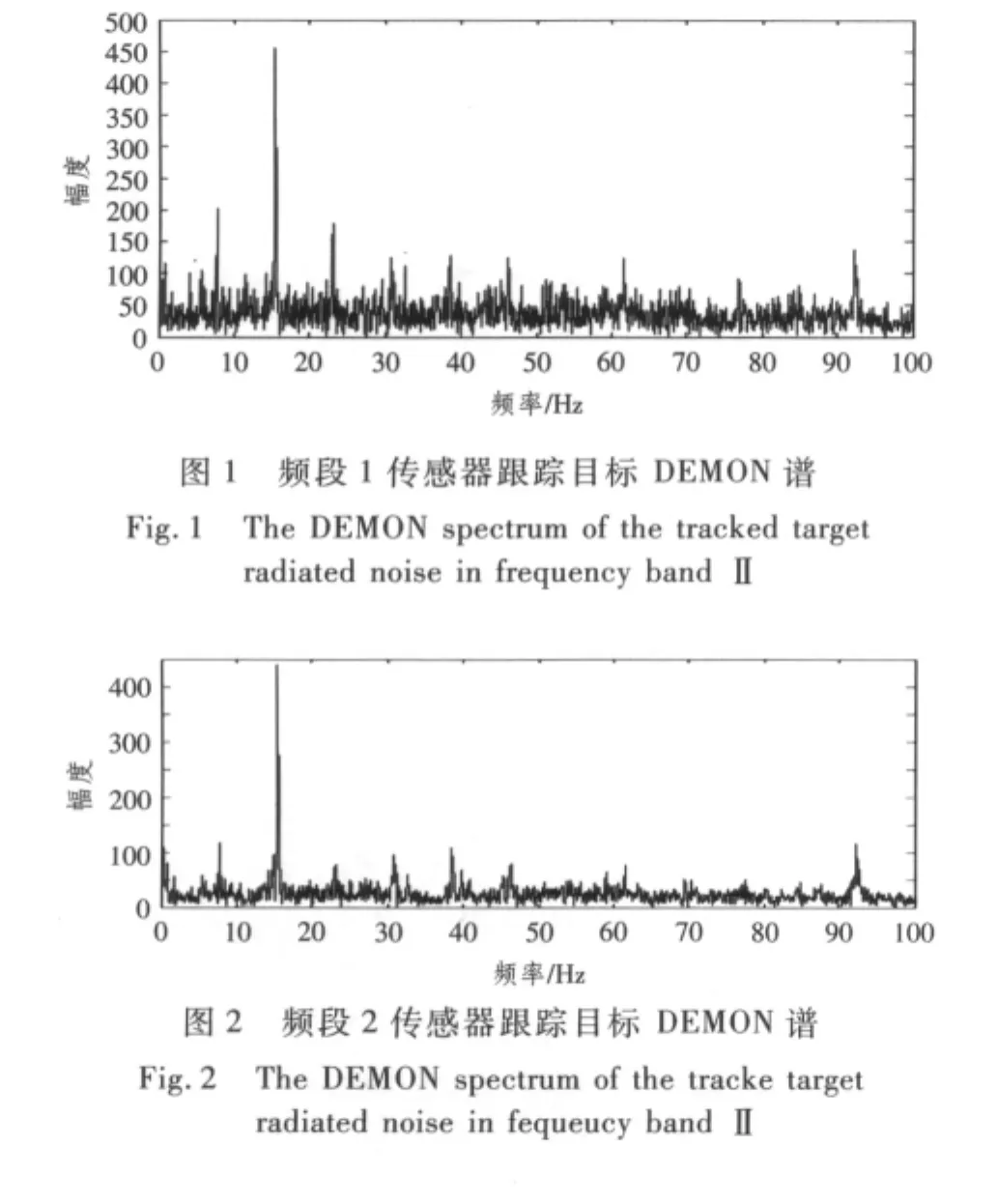
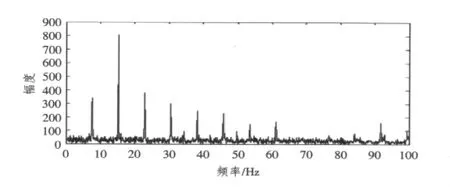
图3 优化后的目标DEMON谱Fig.3 The optimized DEMON spectrum
一般而言,目标在匀速状态下,窄带线谱频率比较稳定,线谱幅度受到运动姿态、传播衰减及多途影响较大,相比之下,频率稳定度好于幅度稳定度。如果采取幅度提取的准则,若判定门限固定,则存在漏检的概率。利用频率稳定度来提取线谱,是在较低幅度门限的基础上,分频段统计线谱频率方差,并将方差转化为线谱稳定程度判定量。步骤如下:
1)将声呐跟踪目标波束输出的DEMON谱进行门限过滤,去除噪声干扰;
2)将过滤后的频谱进行频段划分;统计每个频段中的最大值,并记录其频率值,
3)统计一段时间内,各频段最大值所对应频率序列的方差;
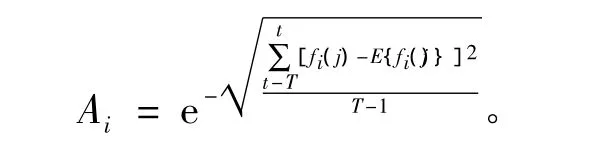
4)将方差转换为稳定度幅度。假设在统计时间T内,频段i线谱的频率分别为fi(j),其频率方差为:
则线谱稳定度幅度为指数法:
频率方差估计根据频域上每个子带内线谱的频率的稳定度,对线谱幅度进行加权处理,能提取频率稳定的目标线谱。基于频率方差估计的稳定线谱提取在跟踪波束中存在干扰目标情况下,克服了线谱幅度起伏较大,能提取目标线谱特征。其缺点是对于具有高信噪比线谱,在其频率不稳定情况下,难以有效提取。为了克服高速目标线谱可能漂移带来的影响,线谱幅度应该是以稳定度幅度进行加权。
2 调制谱线谱分布特征量分析
利用目标DEMON谱可提取目标的轴频信息,但在低信噪比下,线谱较为杂乱。有些情况下,在DEMON谱中有非调制原因的线谱成分,此时计算机自动算法对轴频的提取很不稳定,适用性差。可考虑利用线谱的分布特征来判断高速目标,考虑如下分布特征:
1)能量排列靠前的M个线谱的频率分布
设定频率门限F,在幅度排列靠前的M个线谱中,每找到1个频率超过F的谱线,高速目标置信度增加;在信噪比(线谱相对连续谱背景)排列靠前的M个线谱中,每找到1个频率超过F的谱线,高速目标置信度增加。
2)幅度、信噪比加权平均频率分布
依次统计幅度或信噪比排列靠前的k(k=1,2,…,M)个线谱的幅度加权平均频率,
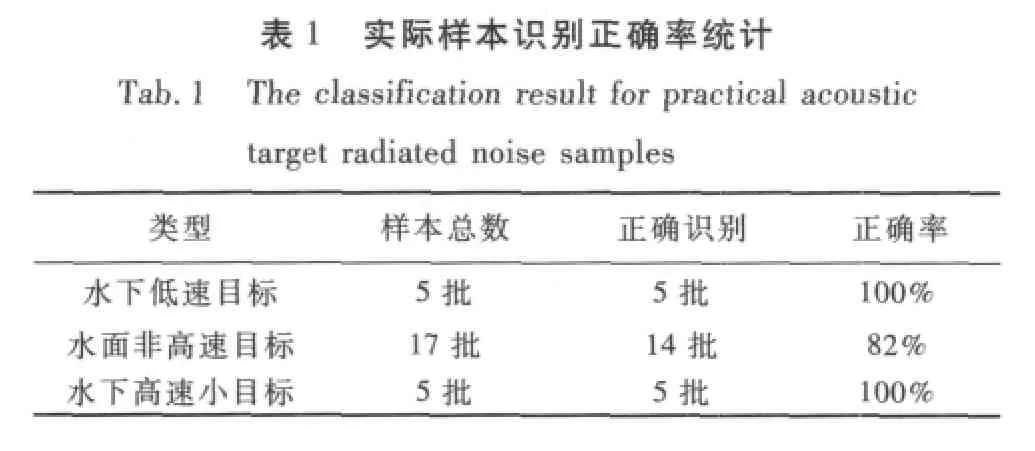
利用上述规则,对23批实际目标数据,对不同的传感器工作频段的线谱特征进行综合优化、提取和识别,识别结果列入表1。
?
3 结语
对水下高速目标应采取多信息综合识别,建立基于数据库信息和经验规则相结合的判定机制。在目标远程发现跟踪阶段,由于目标目标运动分析不能很快给出速度信息,应尽量依据多传感器的探测信息进行综合特征判定。本文讨论了利用多传感器的DEMON谱进行综合优化后,提取线谱特征分布特性来判定高速目标,可作为经验规则用于对水下高速小目标的判定。
Line spectrum distribute based high speed underwater viecle classification menthod
JIANG Xiang-dong
(Science and Technology on Underwater Acoustic Antagonizing Laboratory,Systems Engineering Research Institute of CSSC,Beijing 100036,China)
In this paper,a method of acoustic target corration and recognization based on rediated noise linespectrum distribute is disscussed.The method can be used for surface or underwater target classification.
target recognization;linespectrum extraction
TB565
A
1672-7649(2012)04-0086-03
10.3404/j.issn.1672-7649.2012.04.020
2011-05-25
江向东(1979-),男,主要从事水声信号处理等研究工作。
