基于主成分分析与支持向量机回归的气液两相流容积含气率的测量
2012-07-09李洪伟周云龙
李洪伟,周云龙,刘 旭
(1.华北电力大学,北京102206;2.东北电力大学 能源与动力工程学院,吉林 吉林132012)
两相流广泛存在于化工、冶金和能源等各个工业领域。在生产工程中,需要对多相流或两相流的参数进行实时测量,其中相浓度的在线测量十分重要[1]。目前,国内外对两相流含气率的测量研究较多,测量方法有快速关闭阀门法、电导法、射线衰减法、压差法、微波法、光纤探针及电导探针法等[2-6]。但这些方法测量的数据多为单点、定常或时均值,不能测量整个流动断面上的瞬时含气率分布。
近年来,随着计算机技术的发展,数字图像处理作为一种现代化信息处理技术已被大量用于两相流的实验研究中,它具有非接触、可视化、在较大流动区域内可对各相运动同时进行瞬时测量的特点。本文采用数字图像处理技术,对水平管内气液两相流的流动图像进行拍摄,将连续图像转换为单帧图像,然后对每一帧图像进行灰度纹理特征的提取,应用主成分分析对所提取的特征向量进行约简,得到最有代表性的特征。对得到的有效特征与容积含气率之间建立起关系。文章中用到两种方法的公式拟合,一种是应用一个特征值的方法,应用matlab7.0进行非线性模拟,另一种是应用三个对流型影响较大的特征值,采用支持向量机进行非线性回归,然后将两种拟合结果进行对比,首次将图像的灰度纹理特征与气液两相流的容积含气率建立起关系。
1 实 验
实验是在空气-水两相流系统上完成的,见图1所示。该实验装置主要包括两部分,即流体控制系统和图像采集系统。流体控制系统主要流程为:空气经空压机升压和孔板流量计计量后进入气液两相混合器,水由水泵抽出,用电磁流量计计量后到气液两相混合器,从气液两相混合器出来的气水混和物,流经透明测试管进行流动图像的采集后,进入旋风分离器,将空气分离出来并排入大气,剩下的水流回水箱供循环使用。图像采集系统主要包括照明系统和高速摄影系统。高速摄影机对光线的亮度有较高的要求,照明系统的光源使用6 400 K色温的三基色光管,光线明亮无闪烁。由于两相流流型变化复杂,高速摄影系统采用瑞士公司研发的SpeedCam Visario系统,其最大分辨率为1 536×1 024,最大帧频达到10 000帧/s,能够清晰的抓拍各种流型的瞬变图像。
在图像摄取过程中由于液体和气体均是透明的,可采用逆光照明[7],拍摄各种流态的阴影。为了使光线分布均匀,可在流动图像的后侧有机玻璃管上,蒙上两层绘图用的硫酸纸,可获得满意的拍摄图像。本实验选用内径40 mm,长为2 m的透明有机玻璃管。水体积流量范围:0.011 ~3.180 m3/h,空气体积流量范围:0.500~32.089 m3/h。在水平测试管中采集到大小为1536×1024,帧频为125帧/s的动态流型图像中截取5种典型图像见图2。
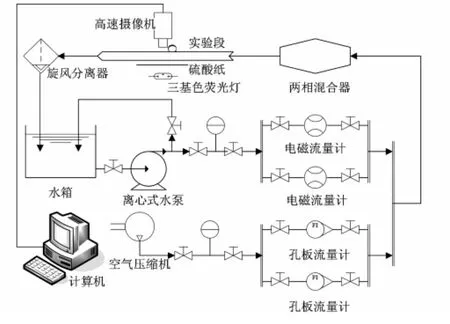
图1 空气-水两相流实验系统
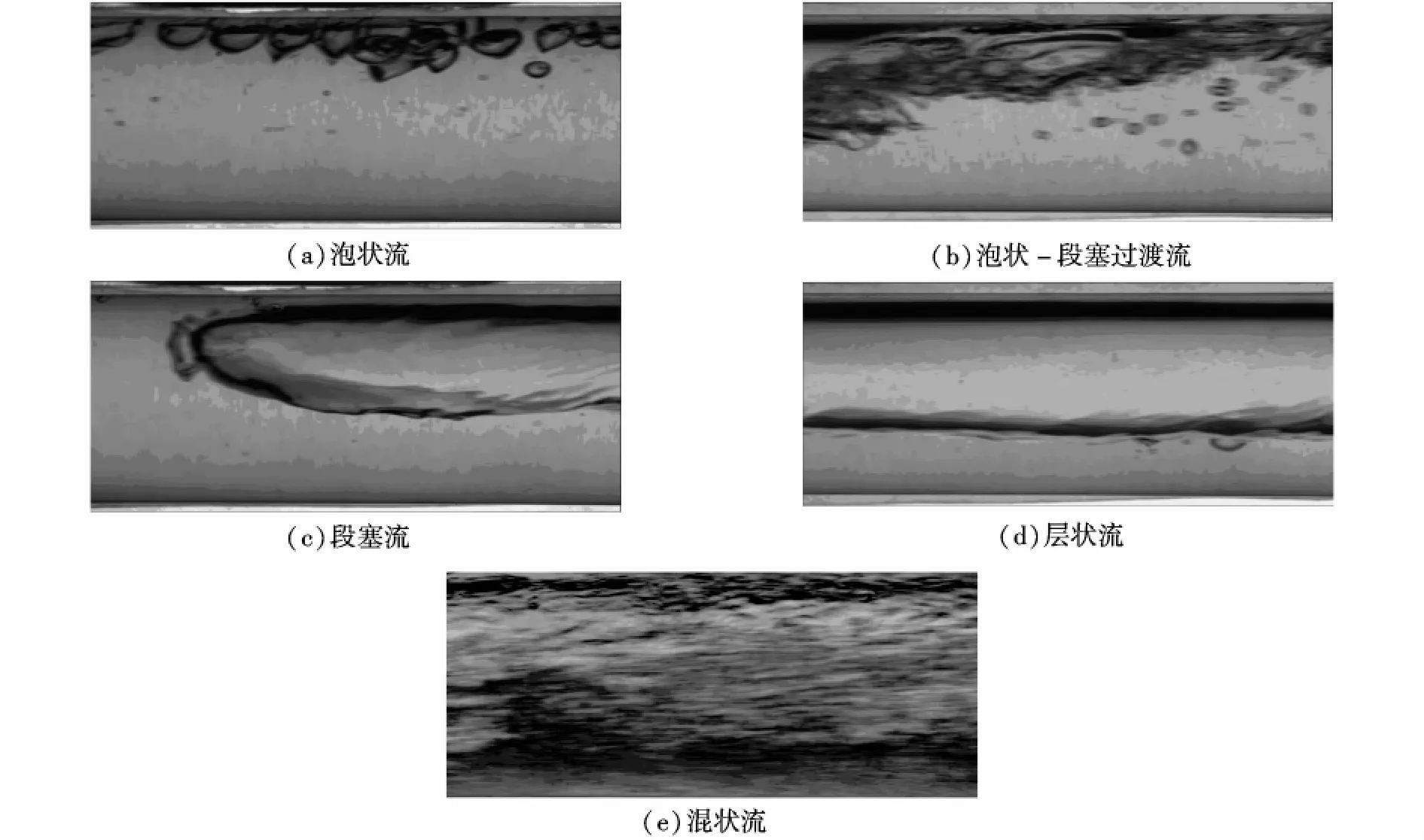
图2 5种典型气液两相流型图像
2 灰度纹理特征提取
灰度直方图是图像窗口中多种不同像素分布的概率统计。视觉系统中所观测到的灰度图像必然对应于一定概率分布的灰度直方图,因此可以通过比较两副图像的灰度直方图的相似性来区分不同图像。流型图像的灰度直方图相似性,可用表1中所列出的统计特征量[8]进行度量。实验表明,这些统计特征能够较好区分不同的灰度直方图,从而区分流型图像,可用来构成流型图像的特征向量。其中,zi表示灰度的一个随机变量,p(zi)表示zi灰度级图像像素的个数,L表示灰度级数。

表1 灰度直方图统计特征
3 主成分分析法
主成分分析法从测得的变量中提取信息,用尽可能少的主成分替代原变量,从而使问题变得简单。其主要原则是使方差最大,尽可能多地保留原变量所包含的信息[9]。
设原始变量为X=[x1,x2,…,xp]进行主成分分析后得到的主成分(综合变量)为Y=[y1,y2,…,ym](m < p)它们是X= [x1,x2,…,xp]的线性组合。新变量Y= [y1,y2,…,ym]构成的坐标系是在原坐标系经平移和正交旋转后得到的,称Y=[y1,y2,…,ym]空间为m维主超平面。在主超平面上,第一主成分y1对应于数据变异(贡献率)最大的方向。
通常我们求解X的主成分可归纳为以下三个步骤[10]:
(1)求X的协方差矩阵的特征根,记为

(2)求λi对应的单位特征向量ξi。
(3)取yi=ξ'iX即为X的第i个成分。
在分析主成分对信号的影响程度时,可以通过求累计贡献率Em来判断,一般取Em>85% 的最小m(m <p),则可得主超平面的维数m,从而可对m个主成分进行综合分析。
对流型图像的7个灰度纹理特征进行主成分分析,文章中取150组样本,每个样本有7个变量。通过计算,特征根以及贡献率见表2。对应的7个特征向量见表3。

表2 特征根及对应贡献率
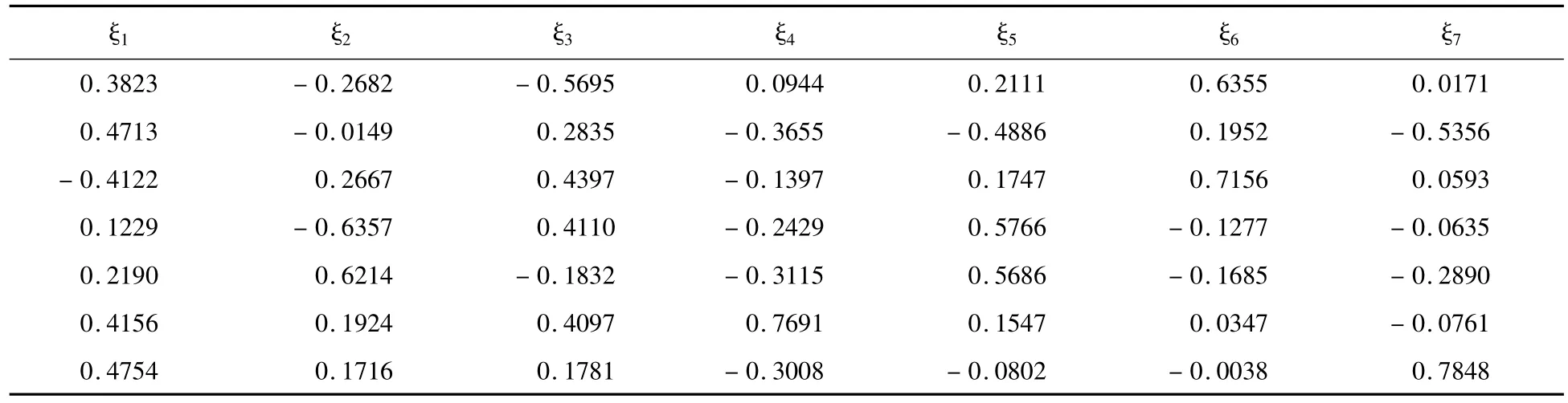
表3 特征向量
特征值的贡献率分布见图3。从图3可知,λ1的贡献率远大于其他特征值,即第一主成分

可以反映系统大部分的信息量。其中,x1—灰度均值,x2—二阶矩,x3—三阶矩,x4—一致性,x5—信息熵,x6—平滑度,x7—标准偏差。文中对150组样本分别求取第一主成分值,进而得到第一主成分集,再对第一主成分集和样本容积含气率集进行数据拟合,得到第一主成分和容积含气率的对应关系,利用matlab7.0进行高斯函数拟合,所得拟合公式如下:


图3 特征值贡献率分布

图4 单元输入拟合^β与β
再用100组测试样本,求出第一主成分y1代入(3)式,计算出,与真实容积含气率β相比较,结果见图4。从图4可以得出:
(2)对于低容积含气率的图像灰度纹理特征的第一主成分值更加能够反映流型的信息。这与气流量增加形成混状流后,实验台的微震对图像拍摄造成小的波动影响,从而影响到特征的提取效果。
综上所述,拟合的效果虽然还可以,但还是不尽理想,从图3中可以看出,除第一主成分的特征根λ1外,第二三主成分的特征根和同样对流型的信息有所影响,三个特征根的方差贡献率和为99.43% 远远大于之前文献定义的阈值85%,对于三个主成分值形成的集合与容积含气率集合进行拟合的方法有多种,这里,我们应用支持向量机的非线性回归来解决这一问题。
4 支持向量机回归模型
考虑用函数

来拟合样本集

其中x为自变量,y为因变量,w为权值向量,b为偏置。Φ(x):Rd→H是一非线性函数,它将数据集S映射到高维线性特征空间,并在该特征空间里寻求最优回归函数。SVR的优化目标和约束条件为别为式(7)和式(8)。对于给定的训练数据集采用ε不敏感损失函数,对应的支持向量机称为ε-支持向量机[11]。

其中,C为惩罚系数,其越大表明对误差的要求越高。式(7)与式(8)的优化问题可通过引入拉格朗日函数将其转化为对偶问题,通过解对偶问题得到式(4)的解:

文中采用Gaussian核

其中,ai为拉格朗日乘子的矢量差,b为常数项,即为偏置常数,σ参数为核宽度。由式(5)~(10)可知,控制C,ε和σ就可以控制支持向量机的推广能力,因此,如何合理地选择这三个参数显得尤为关键。在这里,我们通过对样本长度以及输入数据噪声的标准偏差等估计来确定ε的取值,这三个参数中,ε对支持向量机的回归效果起着尤为重要的影响,而C和σ的取值对回归准确度的影响相对来讲要小得多,这里我们采用文献[12]中的核校准法来确定 ,而C的确定规则使用公式(11),名为直接确定法[13]。

表4 回归参数的选取

将150组测试样本输入拟合好的公式求得的测试含气率与样本真实容积含气率的比较如图5所示。
从图5的比较结果可以明显的看出,采用支持向量机的多元回归拟合效果要优于单元的非线性拟合效果。从图5中可以看到,在高容积含气率时较图4效果取得了明显的改善,唯一出现的几组超出5%的样本大都出现在低含气率的情况下,这和在实验中拍摄的样本相对较少有关,对支持向量机的训练形成了一定的影响。总之,采用支持向量机的多元回归消除了高气速下实验微震对拍摄造成的影响,拟合总体效果明显好于单元非线性拟合。
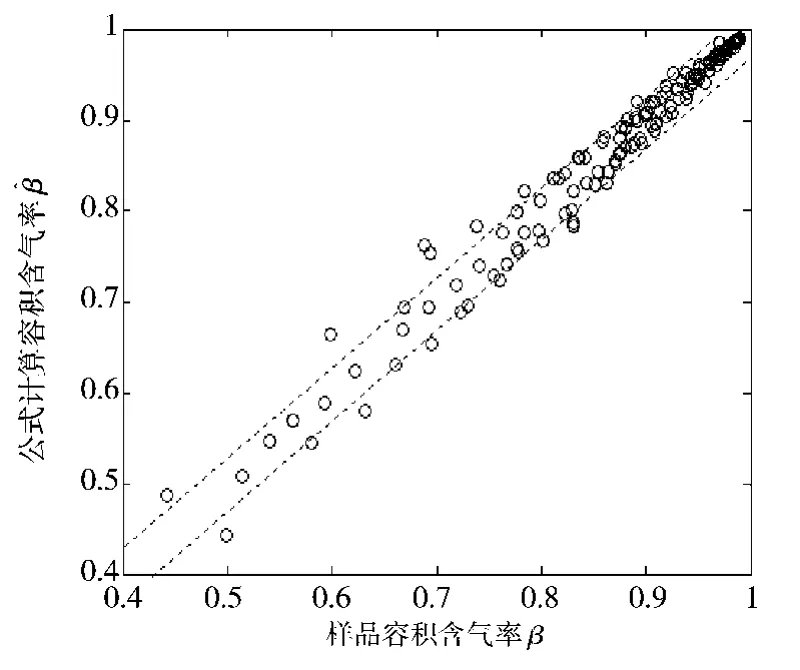
图5 多元输入拟合与β
5 结 论
(1)研究表明,采用图像处理提取灰度纹理特征的实验方法可以反映出气液两相流流动中气液两相的变化情况,在气液两相流的分析研究中,是一种有效的特征提取方法。
(2)引入主成分分析法(PCA),对流型图像灰度纹理特征进行有效降维,能够拟合出误差较小的求取两相流容积含气率公式,是一种新的有效的方法。
(3)支持向量机的多元非线性回归效果明显优于单元非线性拟合,在气液两相流容积含气率的求取过程中,能够克服单元非线性拟合的缺点,回归出较合理的计算模型,与PCA法结合起来是一种有较好应用前景的测量方法。
[1]张宝芬,董宇峰.工业用电容式两相流相浓度传感器[J].清华大学学报,1994,34(4):102-106.
[2]李海青.两相流参数检测及应用[M].杭州:浙江大学出版社,1991:68-118.
[3]Anderson J.L.,Fincke J.R.Mass flow measurement in air-water mixtures using drag devices and gamma densitometer[J].ISA Trans.,1980,19(1):37-48.
[4]刘强,郑莹娜.多相流多参数动态测量技术发展与应用[J].工业仪表与自动化装置,2000(6):52-54.
[5]罗毓珊,李爱华,陈听宽,等.差压法测量两相流相含率的研究[J].工程热物理学报,2004,25(5):789-792.
[6]唐人虎,陈听宽,罗毓珊,等.高温高压下用光纤探针测量截面含气率的实验研究[J].化工学报,2001,52(6):560-563.
[7]Hay K J,Liu Z C,Hanratty T J.A backlighted imaging technique for particle size measurements in two phase flows[J].Experiments in Fluids,1998,25(3):226-232.
[8]周云龙,陈飞,刘川.基于图像处理和Elman神经网络的气液两相流流型识别[J].中国电机工程学报,2007,27(29):108-112.
[9]M.W2S.CHO ,K.2J .KIM.Indirect input identification in multi2source en2vironment s by principal component analysis[J].Mechanical Systems and Signal Processing ,2002 ,16(5):102-105.
[10]郑磊,余桐奎,韩宇亮.振动噪声特征的主成分分析方法应用研究[J].舰船电子工程,2009,29(2):184-187.
[11]Sathiya S,Keerthi C J.Asymptotic Behavior of Support Vector Machines with Gaussian Kernel[J].Neural Computation,2003,15(7):1667-1689.
[12]闫国华,朱永生.支持向量机回归的参数选择方法[J].计算机工程,2009,35(13):218-220.
[13]Vladimir C,Yunqian M.Practical Selection of SVM Parameters and Noise Estimation for SVM Regression[J].Neural Networks,2004,17(1):113-126.
