基于多策略融合技术的水稻叶片边缘检测算法研究
2012-07-09何丹丹
何丹丹,徐 梅
(1.东北农业大学工程学院,哈尔滨 150030;2.东北农业大学理学院,哈尔滨 150030)
基于图像处理技术的农作物检测技术是农产品品质无损检测的主要研究内容之一[1]。叶片与背景的图像分割是基于图像处理技术的农作物检测技术的重要内容之一,叶片边缘检测是图像分割的基础,因此必须寻找一种有效可靠的叶片边缘检测算法,以期得到较为完整的水稻叶片边缘信息,进而提高农作物检测准确率。
针对农作物的边缘检测算法,沈明霞等提出基于零点反对称紧支撑二进小波的图像边缘检测算法,实验结果表明该算法能够获取农田景物的连续、光滑的边缘[2]。Benson等提出了一种基于自适应模糊顺序线性回归模型的农作物边缘检测算法,将其应用于农作物自动收割领域[3]。沈明霞等使用低通滤波器和二值膨胀技术获得农作物边缘[4]。赵峻颖等采用传统的边缘检测算子对草莓图像进行了边缘检测,为草莓采摘机器人的视觉系统中图像识别的预处理工作奠定了基础[5]。张慧等采用Canny边缘检测算子对大米外形检测,试验结果表明该方法对大米粒形识别时有较高的准确率[6]。Valliammal提出了一种基于二进小波变换和p-tile配对阈值的边缘检测方法,实验结果表明能够有效获取叶片边缘[7]。
在众多的农作物图像边缘检测算法中,一部分算法复杂度较高[2-3,7];一部分算法是在对图像去噪处理基础上,采用传统的边缘检测算子对其进行边缘检测,该方法获取的图像边缘往往是不精确的,并伴有虚假边缘和不连续的情况[4-6]。针对上述不足,本文将图像区域最小外接矩形算法[8]、中值滤波、Canny算子和开、闭运算[9]有机结合,提出一种基于多策略融合技术的水稻叶片边缘检测算法,将该方法应用于单叶片、背景为白板的叶片、背景为土壤的叶片、交叉叶片等不同特征的图像,有效地获取连续、光滑的水稻叶片边缘,表明该算法具有高效、准确和鲁棒的特性。
1 传统的边缘检测算法
边缘检测的实质是提取图像中对象与背景间的交界线,图像灰度变化可以用图像灰度分布的梯度来反映,因此可以利用局部图像微分技术获得边缘检测算子。常用的边缘检测算子包括Roberts算子,Sobel算子,Prewitt算子和Laplacian算子[10-11]。各类边缘检测算子的模板如图1所示[10]。
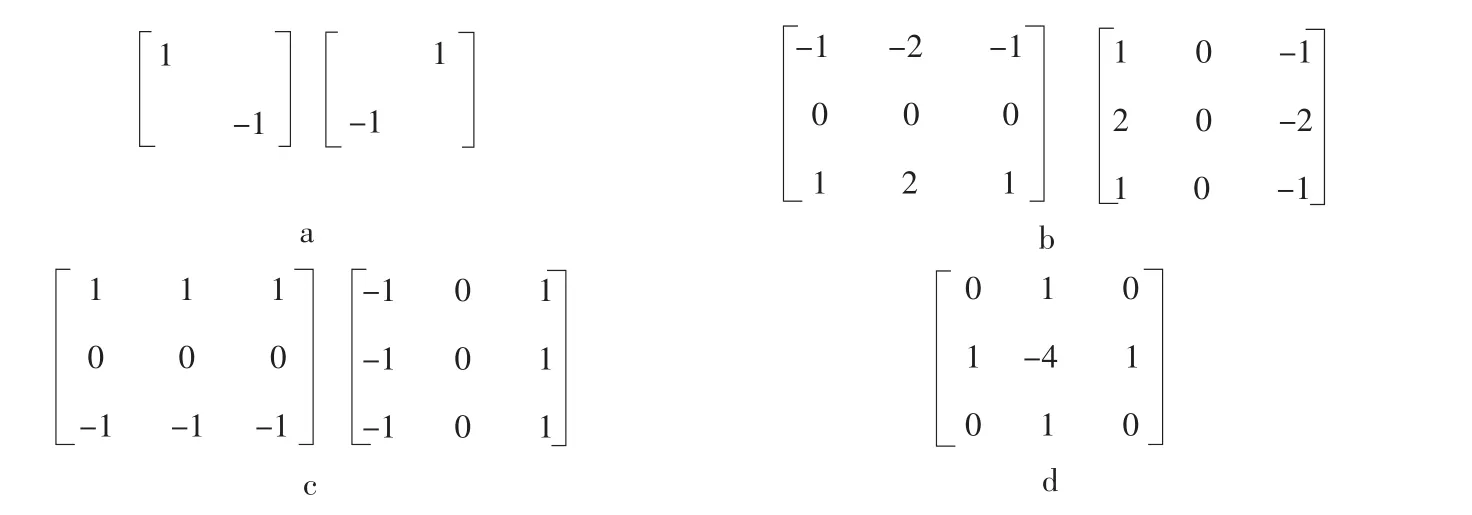
图1 算子模版Fig.1 Operator template
由于四种算子检测方向不同,使之每个算子适用于具有不同边缘特征的图像。其中Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。检测水平和垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感。Sobel和Prewitt算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值检测边缘,对噪声具有平滑作用,定位精度不够高。而Laplacian算子是二阶微分算子,其不具备方向性,对噪声敏感,定位精度高[10]。
2 基于多策略融合技术的水稻叶片边缘检测算法
2.1 边缘检测算法分析与基本思想
受大田复杂条件与图像传感器位置的影响,导致水稻叶片部分往往只占所获得整幅图像的一小部分,从而造成叶片边缘检测算法的检测精度和运算效率较低。为了提高检测精度和运算效率,在边缘检测算法中,首先提取感兴趣的叶片区域,剔除图像的复杂背景信息。本文采用图像区域最小外接矩形算法获取包含水稻叶片的最小矩形区域[8]。
受大田复杂条件和图像传感器的影响,所获取的水稻叶片图像上存在泥土、露水和浮尘等噪声,该噪声属于椒盐噪声。因此在矩形区域提取的基础上,消除水稻叶片图像的噪声。与线性滤波器相比,非线性滤波的中值滤波能够更加有效地消除椒盐噪声[9]。受大田复杂环境和水稻生长期植株特点等影响,造成水稻叶片图像边缘方向的不确定性,使得以检测方向为水平和垂直的传统微分算子(Roberts,Prewitt,Sobel和 Laplacian)不能够有效检测复杂水稻叶片图像的边缘。而Canny算子是在满足一定约束条件下推导出的边缘检测最优算子[12]。因此本文采用Canny算子中确定最优检测方向的策略,以获取图像边缘的检测方向。
在上述对图像的边缘检测后,所获得的图像边缘存在孤立点、虚假边缘和不连续等现象,为了获得一个连续和光滑的图像边缘,本文采用数学形态学图像处理技术消除上述现象[9]。针对孤立点和虚假边缘,采用开运算;针对不连续现象,采用闭运算。由于水稻叶片图像边缘形状具有不确定方向性和狭长特征,因此开闭运算采用自适应的椭圆模板。其中由于孤立点分散特性,开运算应采用较小尺寸的模板,而为了更好地连接不连续的叶片边缘,闭运算应采用较大尺寸的模板。
基于多策略融合技术的边缘检测算法的基本思想是先将水稻叶片图像进行最小外接矩形区域提取与中值滤波的去噪处理,采用Canny算子进行边缘检测,最后采用开闭运算对图像边缘进行拼接处理,从而得到一个精确且连续的水稻叶片图像边缘。
2.2 基本步骤
根据上述的分析,该基于多策略融合技术的边缘检测算法的基本步骤:
Step1:初始化图像f(x,y)及图像坐标系,并设置参考点(x0,y0);
Step2:寻找像素的位置状态及其对应的移动可能集合,确定状态迁移模板Template;
Step3:将当前点和状态迁移模板进行逐个匹配,从而得出新的当前点的位置;
Step4:重复step3,得到整个封闭区域的边界像素点集合W;
Step5:计算边界像素点集合的横纵坐标最大值点和横纵坐标最小值点,以此两点所连对角线的外接矩形即图像区域最小外接矩形,以此提取区域图像并将其转化为灰度图像g(x,y);
Step6:以3×3模板对图像g(x,y)中值滤波获得图像I(x,y);
Step7:计算梯度的幅值和方向。
方向 θφ=。
其中j1(x,y)=f(x,y)*H1(x,y),j2(x,y)=f(x,y)*H2(x,y),
Step8:将非局部极大值点置零以其得到细化的边缘图像E(x,y)。
Step9:对边缘图像E(x,y)做开运算A S=(AΘS)⊕S和闭运算A·S=(A⊕S)ΘS,其中模板 根据水稻叶片边缘的切线和曲率来确定。
3 结果与分析
将基于多策略融合技术的边缘检测算法应用于不同条件下的水稻叶片图像见图2。

图2 水稻叶片图像边缘检测的各方法比较分析结果Fig.2 Comparative analysis of the rice leaf edge detection methods
分别是:白板单叶图像(a.1)、白板重叠图像(a.2)、土地背景图像(a.3)和大田复杂背景图像(a.4)。采用图像区域最小外接矩形算法所得结果如图(b.1-b.4)。该方法的应用能有效地提高该算法的效率。
与几种边缘检测算子相比,可以看出Roberts算子(d.1-d.4)边缘定位精度较高,但容易丢失一部分边缘;Sobel算子(e.1-e.4)和Prewitt(f.1-f.4)算子考虑了邻域的信息,检测效果优于Roberts算子,但是检测出的边缘容易出现多像素宽度;Laplacian算子(g.1-g.4)是二阶微分算子,可以精确定位边缘,但是会产生双像素边缘,没有方向信息,边缘图像连通性差,不光滑;基于多融合策略的边缘检测算子(h.1-h.4),能够将图像中较细的边缘检测出来,边缘图像连通性最好。采用数学形态学的开运算与闭运算对图像(h.1-h.4)的细微断裂部分进行拼接获得图像(i.1-i.4)。与其他方法相比,试验结果表明该算法具有高效、准确和鲁棒的特性。
4 结论
农作物边缘检测问题是基于图像处理技术的农作物检测技术的重要内容之一。在分析已有边缘检测方法的基础上,本文采用图像区域最小外接矩形算法提取主要区域,采用中值滤波去除泥土、露水等椒盐噪声、采用Canny算子提取边缘、采用开运算和闭运算拼接不连续的边缘点并去除非边缘信息,从而提出一种基于多策略融合技术的水稻叶片边缘检测算法,将该方法应用于单叶片、背景为白板的叶片、背景为土壤的叶片、重叠叶片等不同特征的图像,获取了连续、光滑的水稻叶片边缘,表明该算法具有高效、准确和鲁棒的特性,为农作物无损检测技术提供技术支持。
[1]金晶,廖桂平,李锦卫,等.农产品品质无损检测概述[J].农业网络信息,2008(2):90-93.
[2]沈明霞,姬长英,张瑞合.基于小波变换的农田景物边缘检测[J].农业机械学报,2001,32(2):27-29.
[3]Benson E R,Reid J F,Zhang Q,et al.An adaptive fuzzy crop edge detection method for machine vision[C].The 2000 Annual Milwaukee,International Meeting of ASAE,2000.
[4]沈明霞,张瑞合,姬长英.农作物边缘提取方法研究[J].农业机械学报,2000,31(6):49-51.
[5]赵峻颖,潘革生,郭微.边缘检测局部算子在草莓轮廓提取上的应用[J].农机化研究,2008(6):184-186.
[6]张慧,张聪.大米粒形边缘检测算法研究[J].粮油食品科技,2008,16(4):9-11.
[7]Valliammal N,Geethalakshmi S N.Performance analysis of various leaf boundary edge detection algorithms[C].New York:Amrita ACMW Celebration on Women in Computing in India,2010.
[8]吴晓光,王涤琼,盛慧.一种获取图像区域最小外接矩形的算法及实现[J].计算机工程,2004,30(12):124-125.
[9]阮秋琦.数字图像处理[M].北京:电子工业出版社,2005:9.
[10]周道炳,朱卫纲.几种边缘检测算子的评估[J].指挥技术学院报,2000,11(1):59-63.
[11]段瑞玲,李庆祥,李玉和.图像边缘检测方法研究综述[J].光学技术,2005,31(3):415-419.
[12]张彬,司璇,金飞,等.一种改进型Canny图像边缘检测方法[J].中国传媒大学学报:自然科学版,2011,18(2):39-42.
