电传动轮式无人平台运动仿真与分析
2012-07-09张豫南孙晓雨赵玉慧闫永宝
张豫南,孙晓雨,赵玉慧,闫永宝,曾 伟
(装甲兵工程学院,北京 100072)
建立电传动轮式无人平台的仿真模型,并对控制系统和动力学系统进行联合仿真,可以为研制无人平台的电传动系统总体方案和驱动电机性能指标提供技术支撑。通过联合仿真评价所设计的电传动轮式无人平台是否达到预定的目标。采用这种方法确定各项设计参数,降低设计失误所带来的风险,进行全面的性能测试和评估,从而对车辆的设计进行校正和改进,本文以某轻型无人地面平台为研究对象,基于一些假设,在Matlab 和RecurDyn 中分别建立车辆的控制系统模型和动力学模型,并进行了爬坡、中心转向的仿真和分析,证明了模型的准确性,使无人平台的研究取得了更好的效果。
1 驱动电机系统及控制策略
按照发动机、发电机和电动机在电传动系统中位置和工作方式的不同,轮式车辆的电传动系统方案主要有串联式和并联式2 种。串联式是指单个动力传动系间的联合是车载能量源环节联合,而不是直接用于驱动车辆的电量的联合并同时向电传动系统供能。其特点是:①车载能量源环节混合;②单一的电传动系统;③车载能量源由两个以上的电源系统联合组成。并联式是指单个动力传动系间的联合是车辆传动系环节的联合,通过对不同的动力生成装置输出的动能的联合或耦合并经过相应的传动机构输出到驱动轮以满足车辆行驶要求。其特点是:①机械动能的混合;②具有两个或多个动力生成装置,即燃油机和电动机;③每一个动力生成装置都有自己单独的车载能量源[1]。串联式双侧电机驱动方案控制难度大,对各个电机协调控制要求很高,但也最能体现出电传动系统的优势,且仿真结果更具有现实意义,因而本文采用这种方案。
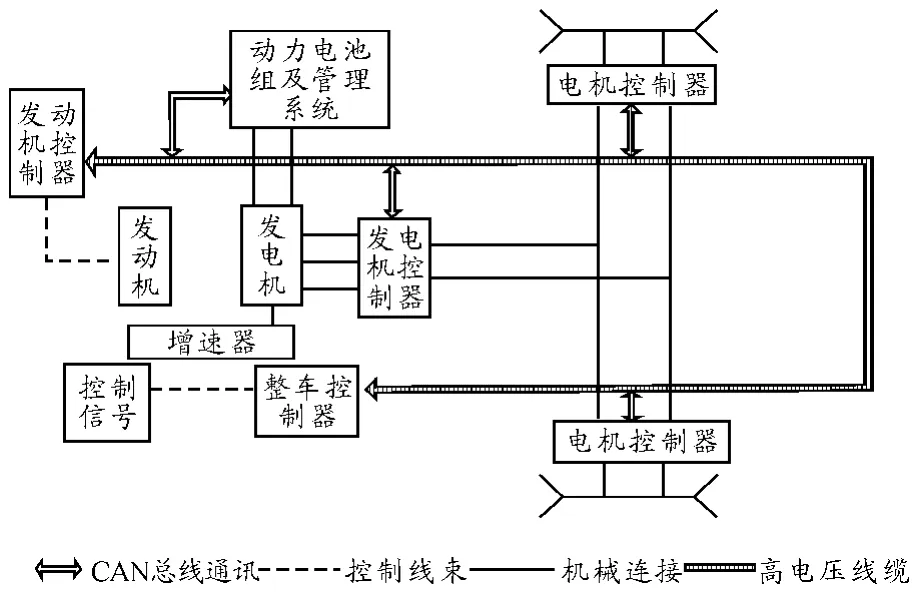
图1 串联式双侧电传动系统结构
1.1 电机参数匹配计算
根据车辆直线行驶力学及牵引电机的匹配方法,对驱动电机的额定功率、额定转速、额定转矩以及峰值进行计算,不计空气阻力,建立下列各方程式[2]

式中:Pe为车辆在坚硬路面平均车速时功率需求;f 为滚动阻力系数;uv为平均车速;CD为风阻系数;A 为车辆横截面积;η 为从电动机到轮胎的传输效率。

式中:ne为电机额定转速;cn为常数;i 为侧传动比;r 为轮胎半径。

式中:Te为额定转矩;cT为常数;Tm为负载力矩;φ 为电动机效率。
对驱动电机进行参数匹配计算后,选择电机参数为:额定电压:32 V,额定电流:57 A,额定功率:4 kW,额定转矩:16 N·m,额定转速:3 450 r/min,最大转矩66 N·m,最高转速5 300 r/min。
1.2 驱动电机数学模型
驱动电机系统是决定无人平台性能的关键技术。目前使用较多的驱动电机有直流电机、永磁无刷电机、异步电机和开关磁阻电机。在对驱动电机进行选择时,需要考虑的几个关键因素有成本、可靠性、效率、维护、耐用性、重量、尺寸以及噪声等。通过对以上四种驱动电机进行比较后得出:异步电机结构简单、价格低廉、运行可靠、维护方便,因此,在该系统中采用异步电动机作为驱动电机。
1)电压方程
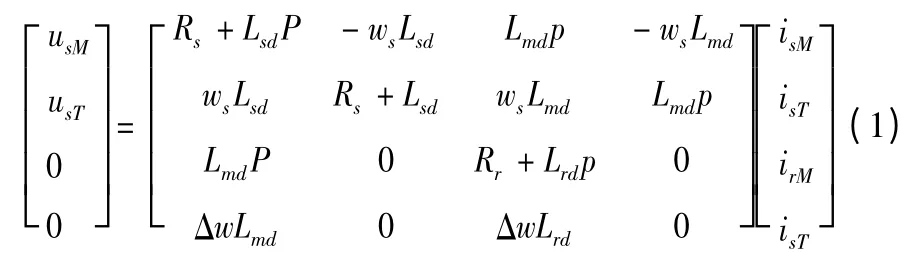
式中:Rs、Rr为定子和转子绕组电阻;Lsd、Lrd为定子和转子绕组的自感;Lmd为定转子绕组间的互感。
2)转矩方程

将式(1)和式(2)归纳在一起就是按转子磁链定向的三相交流感应电动机在同步旋转轴系上的数学模型。
3)运动方程

1.3 电机驱动系统及矢量控制技术
交流电动机相比于直流电动机来说,具有结构简单、运行可靠及结构发展不受限等优点,但交流电机的电磁转矩不像直流电机易于控制,而矢量控制技术的产生解决了这一问题。矢量控制技术就是通过一系列的矢量坐标变换将三相异步电机等效为直流电机,从而使实现了在三相异步电机上模拟直流电机的转矩控制规律。实际上就是在异步电机外部,将电流的励磁分量和转矩分量作为控制量,通过矢量旋转变换得到两相交流控制量,然后再通过二相-三相矢量变换得到三相电流的控制量,再用其来控制三相异步电机的运行,从而就实现了交流电动机电磁转矩的瞬时控制。
所建立矢量控制系统结构框图如图2 所示。w 为测出的电机转速,isM* 为定子电流的励磁分量,将参考转速和检测出的电机转速之差作为转速调节器的输入,转速调节器的输出为定子电流的转矩分量isT* ,通过换矩阵将isT* 和isM* 变换到定子静止坐标系(α -β)上,得到定子两相交流控制量isα* 和isβ* ,再经2/3 变换获得定子三相交流控制量iA* 、iB* 、iC* 。该系统的磁场定向角φs是通过转差运算求得的,其计算过程为[4]:


图2 异步电机矢量控系统结构
2 动力学建模
为了更加精确地完成动力学模型的建立,本课题在Solidworks 中建立车体模型,然后将其导入到多体动力学软件RecurDyn 中为车体添加轮胎和路面模型。RecurDyn 软件中有自带的系统工具包Tire,可以完成轮胎的建模,还提供了Ground 模块用于建立各种路面模型。
2.1 无人平台模型建立
在RecurDyn 中对车体进行建模并为车体装配轮胎后,在车体和轮胎之间添加旋转约束,并在旋转约束上施加一定的扭矩使车轮转动,最终驱动车行进。根据以上的建模方式,得到车辆最终的动力学模型如图3 所示。

图3 无人地面平台三维实体模型
2.2 轮胎模型
在RecurDyn 软件中有专业的轮胎建模工具包Recur-Dyn/Tire。RecurDyn/Tire 工具包中提供了多种轮胎模型,考虑到仿真重点在于车辆的运动性能,这里选择Fiala 轮胎模型。根据参考车型的基本几何参数,轮胎无载荷时的半径为368 mm,轮胎与路面之间的附着系数为0.8,滚动阻力系数为0.024。通过修改特性比使轮胎达到所需值:半径为368,宽度为235。
3 RecurDyn 与Matlab/Simulink 联合仿真
联合仿真技术是利用不同的软件分别建立模型,然后通过软件接口实现两个系统模型之间的信息交互。RecurDyn/Control 提供机械与控制联合仿真的接口,通过与外部的控制软件数据交互实现联合仿真。RecurDyn/ConLink 是Recur-Dyn 自带的控制系统建模求解包,可在一个求解器中实现机构和控制的共同建模、耦合计算[5]。
在进行联合仿真之前,首先要确保车辆动力学模型的准确性,然后在RecurDyn 中定义输入变量Te1、Te2 以及输出变量w1、w2,点击CoSim 导出连接RecurDyn 和Matlab 的m文件。然后,关闭RecurDyn 软件,打开Matlab/Simulink 并设置仿真参数,进行动力学系统和控制系统的联合仿真。
根据所建模型,利用RecurDyn 与Matlab/Simulink 实现车辆的机电一体化联合仿真。如图4 所示,给定电机的输入为阶跃信号step1、step2,经由矢量控制后,电传动控制系统输出转矩Te1、Te2 作为动力学系统的输入量。Recurdyn Plant Block 是动力学系统模块,由驱动电机控制车辆运动后,车辆的左右侧转速w1、w2 作为异步电机的反馈输入,由此形成一个闭环控制系统。

图4 动力学系统与控制系统联合仿真
4 仿真及分析
本文研究的是轮式车辆,轮胎具有弹性使得它与地面间的相互作用力十分复杂,因而必须用理想化的方法来进行研究。我们假设车辆行走机构加到土壤上的载荷是常数;地面是平坦的;土壤处于“稳态”或“准静态”。为了合理分析车辆运动,还要做如下假定:①行驶在良好的坚硬路面上;②车速低于30 km/h;③地面对车轮的侧向作用力垂直于车轮纵向平面;④车轮与地面的接触视为点接触;⑤质心位于车辆的几何中心上。定义X 轴正方向为车辆前进的方向,Y 轴为车身的横向方向,Z 轴负方向为重力加速度的方向。
4.1 直线行驶仿真分析
这里给定控制系统转速3 000 r/min 进行仿真,在0 ~7 s间车速逐渐升高,行驶至7 s 后速度趋于稳定,达到理想车速15 km/h(即4 m/s)。最终得到如图5 所示曲线。

图5 车辆行驶速度
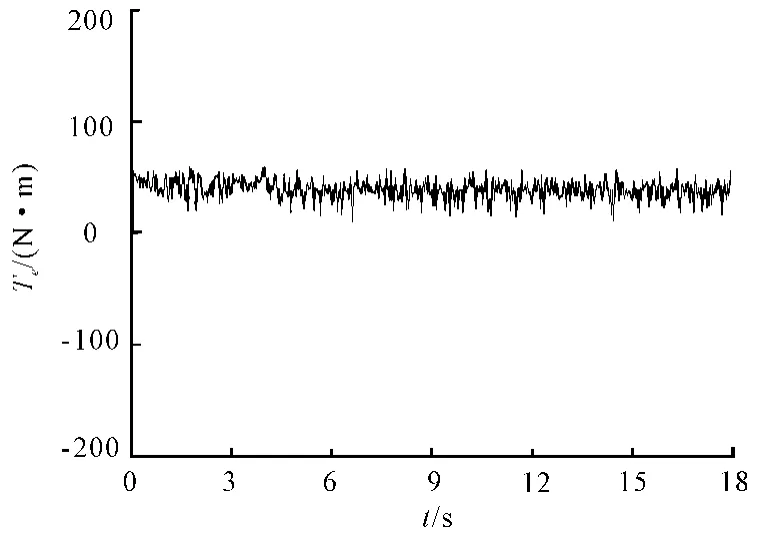
图6 电机负载转矩
4.2 爬15°坡仿真分析
车辆爬坡时需要两侧电机提供较大的转矩。随着坡度的增加,行驶阻力增大,车辆在坡面上稳定行驶所需功率也将增大。由图7、8 可以看出:车辆在0 ~5 s 加速运动,行驶至5 s 时开始爬坡,转矩加大,车速降低,至12 s 时爬坡结束,车速开始提高,最终接近理想值18 km/h。
4.3 中心转向仿真分析

图7 车辆爬坡过程车速曲线

图8 车辆爬坡运动
在水平坚硬路面上,运用差速转向的原理,给定左右侧电机4 kW 的功率,控制右侧电机正向运行,左侧电机反向运行,两侧电机产生相反的电磁转矩,使车辆进行原地中心转向。图9 为整车原地中心转向速度曲线,图10 为轮胎质心旋转轨迹,类似于一个圆,说明原地中心转向的控制是正确的。

图9 车辆中心转向车速曲线

图10 车辆中心转向轮胎轨迹
5 结束语
1)本文利用Matlab 软件和RecurDyn 多体动力学软件对轻型无人地面平台进行建模,通过建模过程对车辆结构有了清楚地了解,并研究了电传动用异步电机矢量控制技术,参照联合仿真的结果调整异步电机的各项参数,使其能够驱动无人平台按照要求行驶。得到了电机负载转矩和车辆行驶速度等曲线。
2)通过实验我们看到了无人平台的运动状况,直观的了解到各项指标参数对车辆运动的影响和需要改进的地方,此方法可以预测车辆的运动性能,缩短研发周期,降低研发成本,为无人平台的研究和开发提供了重要保证。
[1]孙逢春,张承宁.装甲车辆混合动力电传动技术[M].北京:国防工业出版社,2008:15-17.
[2]陈泽宇,张承宁,李军求,等.双侧电传动履带车辆电机匹配与仿真[J].车辆与动力技术,2009(4):11-13.
[3]余名俊,李岚,王秀丽.异步电动机的MATLAB 建模与仿真[J].微电机,2006(6):35-37.
[4]李华德.交流调速控制系统[M].北京:电子工业出版社,2003:146-148.
[5]焦晓娟,张湝渭,彭斌彬.Recurdyn 多体系统优化仿真计算[M].北京:清华大学出版社,2010.
[6]赵玉慧,刘春光,臧克茂.基于Matlab 与RecurDyn 的电传动履带车辆的联合仿真[J]. 车辆与动力技术,2007(3):24-26.
[7]程虹霞,骆云志,朱松柏,等. 多传感器信息融合技术在无人平台避障中的应用[J].兵工自动化,2006(6):89-91.
