倾转旋翼机模型及仿真
2012-07-09徐庆九
唐 亮,徐庆九,赵 鹏
(1.海军航空工程学院 控制工程系,山东 烟台 264001;2. 91911 部队,海南 三亚 572000)
倾转旋翼机是一种将固定翼飞机与直升机融为一体的新型飞行器,目前国外已经研制了XV -3、XV -15、V -22、BA609 等有人驾驶的倾转旋翼机和HV -911“鹰眼”以及“黑豹”倾转旋翼无人机,这表明国外的倾转旋翼技术日渐成熟。我国也已将倾转旋翼机关键技术研究列入了国家高技术研究发展计划。采用分体法,将倾转旋翼机分为旋翼、机身、机翼、垂尾和平尾5 个部分分别建立空气动力学模型,求得机体各部分以及旋翼产生的升力、阻力表达式,并将它们产生的力和力矩转换到机体坐标系下3 个方向的力和力矩。在Matlab/Simulink 仿真环境中建立倾转旋翼无人机非线性仿真模型,使用trim 命令对倾转旋翼无人机进行配平,将配平计算的结果与美国建立的通用仿真模型GTRS 进行比较,验证所建模型的合理性。
1 倾转旋翼机动力学模型
1.1 飞机运动学方程
在机体坐标系中,倾转旋翼机的运动学方程:
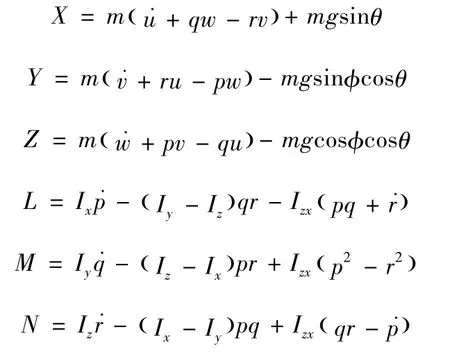
其中作用在机体3 个轴上的合力和合力矩:

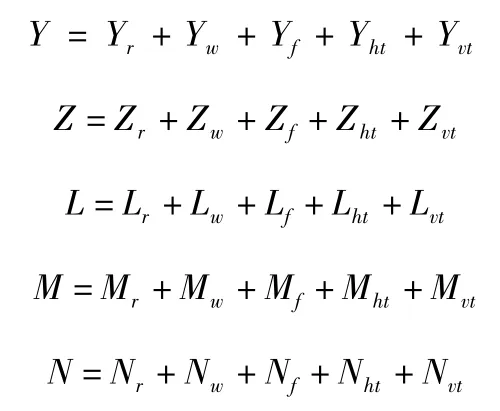
下标分别表示:旋翼(r)、机翼(w)、机身(f)、平尾(ht)和垂尾(vt)。倾转旋翼机的姿态角和角速度有如下关系:

1.2 旋翼气动模型
1.2.1 挥舞角的求解
运用叶素理论,对桨叶上的微段dr 进行分析,它受到惯性力矩dMI,离心力矩dMFc和挥舞力矩dML的作用,表达式为:

根据力矩平衡条件∑M =0,又因为βi很小,sinβi≈βi,cosβi≈1。从而得到挥舞方程:

求解出挥舞角βi。
1.2.2 旋翼气动力
倾转旋翼机旋翼桨叶的剖面图如图1 所示。假设旋翼桨叶剖面的阻力系数在整个旋翼旋转平面上是均匀的,且不随迎角和马赫数的变化而变化,因此桨叶剖面的升力和阻力表达式:
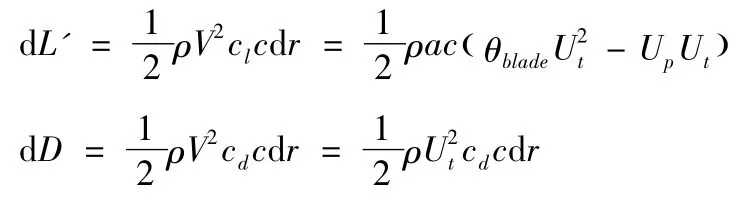

图1 旋翼桨叶剖面
桨叶剖面在叶元风轴系下3 个方向的力:

将桨叶剖面的力dX',dY',dZ'沿无量纲形式的桨叶轴向积分,可以得到旋翼桨叶在风轴系3 个方向上的无因次力X',Y',Z',并考虑到和cosφ≈1,得到:

再将X',Y',Z'转换到机体坐标系下,从而得到机体坐标系下旋翼产生的力和力矩。
1.3 机翼气动模型
由于旋翼对机翼的气动干扰,在计算机翼的力和力矩时,把机翼分为滑流区和自由流区2 个区域分别计算,如图2所示。
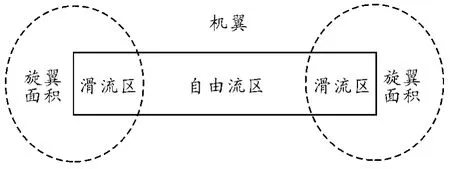
图2 机翼滑流区与自由流去示意图
1.3.1 滑流区气动力
滑流区的面积:

a 与b 满足:
计算滑流区的力和力矩应该考虑旋翼对机翼的气动干扰,所以机翼在滑流区的气流速度包括远处来流速度Vw1和旋翼在机翼处地诱导速度Vi:
1.3.2 自由流区气动力
自由流区面积:

计算自由流区的力和力矩只考虑远处来流速度,即:Vwfs=Vw1。
1.4 平尾气动模型
倾转旋翼无人机在直升机模态时,旋翼诱导速度大,下洗流的方向几乎是垂直向下的,不经过平尾。固定翼飞机模态时,旋翼诱导速度很小,对平尾的干扰不显著。因此,忽略旋翼对平尾的干扰,平尾速度:

其中K'ht是平尾的动压损失系数,可以由风洞试验测得。
1.5 垂尾气动模型
垂尾的力和力矩的求解与平尾类似,只是在计算垂尾迎角时要考虑侧滑流的影响。
1.6 机身气动模型
由于倾转旋翼机的旋翼安装在机翼的两端,并且2 个旋翼之间的距离远大于旋翼的半径,旋翼对机身的气动干扰相对较小,因此在求解机身力和力矩时忽略旋翼滑流对机身的影响。
2 倾转旋翼机仿真模型的建立
根据上一节建立的机体各部件的气动模型,在Matlab/Simulink 仿真环境中分别建立倾转旋翼机的输入模块、部件的气动力模块、机体运动学模块和输出模块。
输入模块的功能是把外部的操纵量传递给机体各部件的模块。机体各部件的气动模块接收输入模块的操纵量并从运动学模块引入机体的状态量,进而输出气动力。运动学模块接收机体的气动力和当前机体的状态量,输出机体下一步的状态量。输出模块是把机体的状态量以可视化形式表示出来。
根据模块之间的信息传递关系(图3),把各个模块连接起来就形成倾转旋翼机的仿真模型。在Matlab/Simulink 仿真环境中构建完整的仿真图,如图4 所示。

图3 倾转旋翼机非线性仿真框图

图4 倾转旋翼机非线性仿真图
得到倾转旋翼机的仿真模型后,就可以应用Matlab 的优化函数和工具箱进行分析和处理。
3 倾转旋翼样机的配平计算
为了验证本文所建模型的正确性,以XV -15 倾转旋翼机为样例机进行配平计算。XV-15 是美国贝尔公司根据美国陆军和NASA 的要求研制的倾转旋翼机,将它的一些基本参数带入到上节的仿真模型中,在利用Matlab/Simulink 中的优化函数对XV-15 样例机进行悬停和前飞状态下的配平计算和特征值分析。将本文所建模型的特征值与GTRS 模型的特征值进行比较,如表1 所示,可以得出:本文建立的模型与GTRS 模型具有较好的一致性。

表1 特征值对比
4 结束语
本文建立了倾转旋翼机的非线性模型,考虑了旋翼滑流对机翼的气动干扰。在Matlab/Simulink 环境下对非线性模型进行仿真,并对样例机进行配平分析和特征根分析,通过与GTRS 模型进行比较,验证了模型的准确性。
[1]杨军,吴希明.倾转旋翼机飞行控制[M].北京:航空工业出版社,2006.
[2]Desopper A,Heuze O,Routhieau V,et al.Study of the low speed characteristics of a tilt rotor[C]//Presented at the 28th European Rotorcraft Forum.Bristol UK:European Rotorcraft Forum,2002(16):1-14.
[3]张义涛,李明,李达.倾转旋翼飞行器飞行仿真模型[J].直升机技术,2008(2):11-16.
[4]高正,陈仁良.直升机飞行动力学[M].北京:科学出版社,2003.
[5]Mehra K,Prasanth R K,Bennett R L,et al.Model predictive design for XV-15 tilt rotor flight control[C]//American Institute of Aeronautics and Astronautics,Guidance,Navigation,and Control and Exhibit.Montreal:American Institute of Aeronautics and Astronautics,2001:1-11.
[6]周文雅,李立涛,杨涤.倾转旋翼航空器建模方法研究[J].飞行力学,2008,26(3):5-9.
