电流型双频率脉冲序列调制开关变换器
2012-07-06王金平许建平兰燕妮
王金平 许建平 兰燕妮
(西南交通大学电气工程学院 成都 610031)
1 引言
开关变换器具有功率转换效率高、功率密度大和重量轻等明显优点而得到了广泛应用[1]。目前,越来越多的应用场合要求开关变换器具有快速地动态响应速度,以使电气设备负载快速变化时,保持输出电压恒定或快速恢复稳态;此外,随着EMI 标准的建立与完善,要求开关变换器具有较低EMI 噪声,以减少对电网以及周围环境的污染。
随着对开关电源动态响应速度要求的不断提高,以线性控制理论为基础的传统PWM 调制方式已越来越难以满足要求。一些非线性控制技术,如单周控制[2]、滞环控制[3,4]、滑模控制[5]及脉冲序列控制[6-8]等被应用于开关变换器控制系统的设计。单周控制对输入电压扰动具有良好地抑制能力,但存在负载动态响应速度慢和稳态误差的缺点;滞环及滑模控制具有快速地动态响应速度,但它们的工作频率随输入电压或负载的变化而变化,增加了滤波器的设计难度;脉冲序列控制实现简单,负载动态响应速度快,极大地提高了开关变换器的动态响应速度。
已有研究成果表明,PWM 开关变换器的EMI峰值主要集中在开关频率及其倍频处[9],采取滤波和屏蔽实现EMI 抑制的方法增加了硬件的成本和体积[10],因此,从产生机理上抑制开关变换器EMI是最理想的有效途径,开关频率调制[11]和开关频率的混沌控制[12]从机理上很好地降低了EMI 噪声水平。
为了提高开关变换器的动态响应速度,降低开关变换器的EMI,本文提出了开关变换器的电流型双频率脉冲序列调制(Bi-Frequency Pulse-Train Modulation,BF-PTM)方法。电流型BF-PTM 开关变换器实现简单,无需误差放大器及其相应的补偿网络设计,动态响应速度快,EMI 噪声小,易于实现过电流保护和并联均流控制。本文以 DCM(discontinuous conduction mode)Buck 变换器为例,分析了电流型BF-PTM 工作原理及控制策略,进行了稳态分析,建立了小信号模型。仿真及实验结果表明,电流型BF-PTM 不仅具有快速的动态响应速度,而且利用频率拓展原理有效地降低了变换器EMI 噪声水平,具有优越的控制性能。
2 电流型BF-PTM 控制原理
电流型BF-PTM 控制DCM Buck 变换器如图1所示。当Buck 变换器工作于DCM 时,电感电流在开关管V 导通前为零,续流二极管VD 在零电流下关断,这种固有的软开关特性使得变换器具有较高的工作效率。从图1 可以看出,电流型BF-PTM 控制器由比较器、D 触发器、延时器、窄脉冲触发装置和RS 触发器组成,其中比较器I 与D 触发器构成输出电压监测电路。当D 触发器CLK 端触发脉冲Uc来临时,其Q 端电平与D 端保持一致,之后一直保持不变,直到触发脉冲Uc再次来临。当CLK端触发脉冲来临时,若D 触发器Q 端输出高电平,则表明当前时刻输出电压Uo低于参考电压Uref;反之,若Q 端输出低电平,则表明当前时刻输出电压Uo高于参考电压Uref。

图1 电流型BF-PTM 控制DCM Buck 变换器Fig.1 Current-mode BF-PTM controlled DCM buck converter
触发脉冲Uc来临的同时,RS 触发器置位,其Q 端输出高电平,Buck 变换器开关管V 导通,电感电流iL线性上升;当电感电流上升到电流限定值ILim时,比较器II 输出端电平翻转置高,RS 触发器复位,其Q 端输出低电平,Buck 变换器开关管V 关断,电感电流线性下降。由于ILim的存在,使得电流型BF-PTM 具有自动限流功能,从而可以实现过电流保护。
当触发脉冲Uc来临时,若D 触发器Q 端输出高电平,电流型BF-PTM 控制器经过TH时间后使窄脉冲触发装置产生触发脉冲;反之,若D 触发器Q端输出低电平,控制器则经过TL(k=TL/TH,k>1)时间后使窄脉冲触发装置产生触发脉冲,分别为D触发器和RS 触发器提供触发时钟信号和置位信号,进入下一开关周期。
由以上分析可知,电流型BF-PTM 控制器由输出电压外环与电感电流内环构成,输出电压外环决定控制脉冲UP的周期为TH或TL,电感电流内环决定开关管V的导通时间。电流型BF-PTM 控制DCM Buck 变换器工作原理如图2 所示。

图2 电流型BF-PTM 工作原理Fig.2 Operation principle of current-mode BF-PTM
图2 中,在t1时刻,触发脉冲Uc来临,开关管V 导通,电感电流iL线性上升,当电感电流上升到ILim时,开关管V 截止,电感电流线性下降到零。由于t1时刻输出电压Uo小于参考电压Uref,D 触发器 Q 端输出高电平,因此当前控制脉冲的周期为TH;而在t2时刻,输出电压Uo高于参考电压Uref,电流型BF-PTM 控制器选择TL作为该控制脉冲的周期。
由图2 及以上分析可知,触发脉冲Uc来临时刻(即控制脉冲UP的开始时刻)输出电压与参考电压间的大小关系决定了当前控制脉冲周期为TH或TL,控制脉冲UP为两个不同频率的脉冲的组合。因此,相对于PWM 控制方式,电流型BF-PTM 控制开关变换器的开关频率不再单一恒定,控制脉冲频谱能量被扩展到两个固定频率及其谐波上,从而有效降低了EMI 峰值,使开关变换器具有较低的EMI 噪声。
3 稳态分析
当电流型BF-PTM 控制DCM Buck 变换器稳定工作时,由图2 可知在任意开关周期,电感电流从零上升到电流限定值ILim的时间,即开关管导通时间为

故在任意开关周期内,DCM Buck 变换器输入电流平均值Iin为

当开关周期为TH时,式(2)中T=TH,否则T=TL。
由式(1)、式(2)可得任意开关周期内变换器输入功率Pin1为

当电流型BF-PTM 控制Buck 变换器稳定工作时,若干高频率脉冲周期TH与低频率脉冲周期TL构成一个循环周期,控制脉冲以循环周期进行循环。假定一个循环周期由μH个高频率脉冲周期TH与μL个高频率脉冲周期TL组成,由此可得电流型BF-PTM 控制DCM Buck 变换器的平均输入功率

在式(4)中,分别令μH和μL均为零,可以得到输入功率的最小值Pin,min和最大值Pin,max

式(5)确定了输入功率的变化范围。从式(5)可以看出,通过改变ILim、TH和TL的值能够调节电流型BF-PTM 控制DCM Buck 变换器的输入功率变化范围。
此外,式(5)同样确定了电流型BF-PTM 控制DCM Buck 变换器理论上(不考虑损耗)的输出功率调整范围。在进行电流型BF-PTM 控制DCM Buck 变换器设计时,输出功率Po必须满足

否则,若期望输出功率大于Pin,max,由于输入功率不足,输出电压将低于参考电压,电流型BF-PTM 控制器将一直选择TH作为控制脉冲周期;同样,若期望输出功率小于Pin,min,由于输入功率过剩,电容储能,输出电压高于参考电压,控制器将一直选择TL作为控制脉冲周期。此时,电流型BF-PTM 控制失效,Buck 变换器输出电压失控。
4 小信号模型
假定电流型BF-PTM 控制DCM Buck 变换器稳定工作时,μH个高频率脉冲周期TH和μL个低频率脉冲周期TL构成控制脉冲循环周期(μHTH+μLTL)。在一个控制脉冲循环周期内,电感电流平均值为
式中,Uin、Uo、ILim均为直流稳态量;均为交流小信号扰动量。
对式(7)两端取微分,可得电感电流平均值的小信号扰动量

式中

此外,对于Buck 变换器有

由式(8)、式(9)可以建立电流型BF-PTM 控制Buck 变换器的小信号模型,如图3 所示。

图3 电流型BF-PTM 控制Buck 变换器小信号模型Fig.3 Small-signal model of current-mode BF-PTM controlled Buck converter
5 仿真结果
为了验证开关变换器电流型BF-PTM 方法的控制性能,采用PSIM 软件对电流型BF-PTM 控制DCM Buck 变换器进行了仿真研究,仿真电路参数:Uin=20V,Uo=6V,L=10μH,C=1880μF,TH=15μs,TL=60μs,ILim=5.6A,其中输出电容等效串联电阻RESR=20mΩ。
图4 为输出功率为6W 时电流型BF-PTM 控制DCM Buck 变换器的稳态仿真结果。从图中可以看出,此时控制脉冲循环周期由1 个高频率脉冲周期及1 个低频率脉冲周期构成。

图4 输出功率为6W 时的仿真结果Fig.4 Simulation results at 6W output power
图5 为输出功率为12W 时电流型BF-PTM 控制DCM Buck 变换器的稳态仿真结果。此时,控制脉冲循环周期由11 个高频率脉冲周期及1 个低频率脉冲周期构成。相对于图4,随着负载功率增加,控制脉冲循环周期内高频率脉冲周期数明显增加,以向变换器输出端传递更多的能量,满足负载要求。
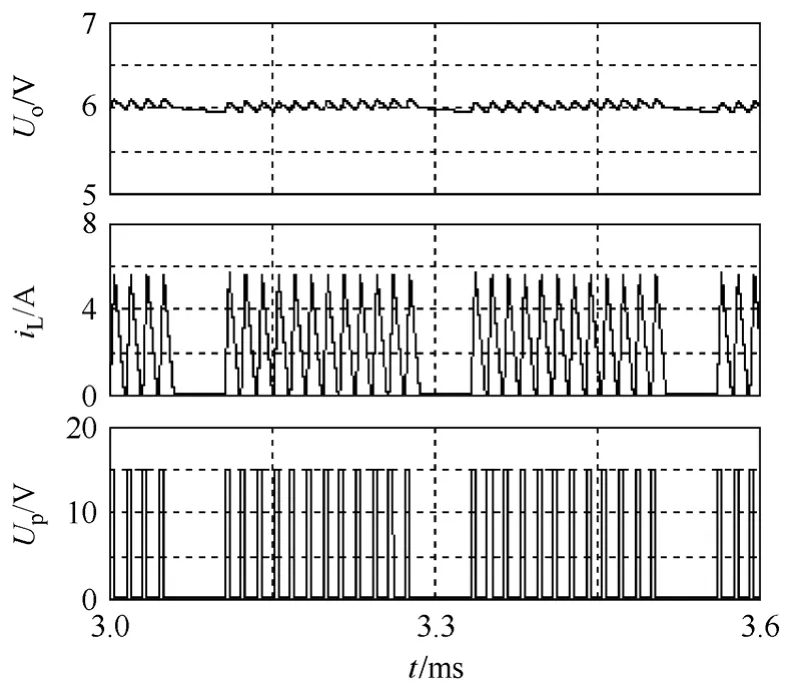
图5 输出功率为12W 时的仿真结果Fig.5 Simulation results at 12W output power
图6 为负载电流在6.0ms 时由1A 突变至2A,即输出功率由6W 突变至12W 时,分别采用电流型PWM 控制和电流型BF-PTM 控制的DCM Buck 变换器的动态响应速度仿真结果,其中电流型PWM的开关周期为15μs,误差放大器采用PI 调节(比例系数Kp=5,积分时间TI=0.5μs)。从图6 可以看出,面对同样的负载突变,电流型BF-PTM 控制的动态响应速度很快,几乎没有调整时间,动态响应性能明显优于电流型PWM 控制。

图6 电流型PWM 与电流型BF-PTM 控制DCM Buck 变换器负载动态响应特性响应Fig.6 Load transient response of current-mode PWM and current-mode BF-PTM DCM Buck converter
图7 为负载电流大范围变化时电流型BF-PTM控制DCM Buck 变换器的仿真结果。对于文中仿真电路参数,由式(5)可以确定输出功率变化范围为(3.7~14.93W),所以在图7 中当负载功率为6W时,输出电压稳定在期望值6V,而当负载功率分别为20W 和零时,BF-PTM 控制DCM Buck 变换器的输出功率超出了调节范围,输出电压失调,输出电压分别低于和高于期望输出电压,这与式(6)理论分析结果一致。

图7 负载电流大范围变化时的仿真结果Fig.7 Simulation results under larger output current variations
图 8 所示为电流型 PWM 控制与电流型BF-PTM 控制DCM Buck 变换器主功率Mosfet 漏源间电压信号uDS的频谱图。从图中可以看出,采用电流型BF-PTM 控制时,uDS频谱具有更低的谐波峰值,从而产生更低的EMI 噪声,使得变换器更容易满足相应的EMC 标准。

Fig.8 VDS 频谱仿真结果Fig.8 Simulation results of spectrums of VDS
6 实验验证
为了验证理论分析与仿真结果的正确性,采用与仿真一致的电路参数,制作了相应的实验系统进行实验验证。
图9 所示为不同输出功率时电流型BF-PTM 控制DCM Buck 变换器的稳态实验结果。在图9a 中,控制脉冲循环周期由1 个高频率脉冲周期及1 个低频率脉冲周期构成。在图9b 中,控制脉冲循环周期由15 个高频率脉冲周期及1 个低频率脉冲周期构成,实验结果与仿真结果给出的控制脉冲循环周期组成的差别,是由实验电路的非理想功率变换效率的影响造成的。图9 与图4、图5 仿真结果类似,随着输出功率的增加,控制脉冲循环周期内高频率脉冲数量也随之增加,以向输出端提供更多的功率。

图9 不同输出功率时的实验结果Fig.9 Experimental results under different output power
图10 为负载突变时电流型PWM 控制与电流型BF-PTM 控制DCM Buck 变换器的输出电压及负载电流实验波形。从图中可以看出,当负载瞬间加载或减载时,电流型BF-PTM 控制能够快速调整输出电压,比电流型PWM 具有更为优越的动态响应性能。

图10 负载动态响应实验结果Fig.10 Experimental results of load dynamic response
图 11 所示为电流型 PWM 控制和电流型BF-PTM 控制DCM Buck 变换器主功率Mosfet 漏源间电压信号uDS的频谱图。从图中可以看出,采用电流型BF-PTM 控制时,DCM Buck 变换器uDS频谱存在较多的边频分量,有效降低了谐波峰值,从而产生更低的EMI 噪声,使得变换器更容易满足相应的EMC 标准。


图11 VDS 频谱实验结果Fig.11 Experimental results of spectrums of VDS
7 结论
本文提出了开关变换器电流型双频率控制技术,该技术无需误差放大器及其相应的补偿网络,具有结构简单,易于实现等优点。电流型BF-PTM控制采用高、低频率脉冲对开关变换器输出电压进行调整,降低了电磁干扰噪声水平,且随着电流环的引入,使得变换器具有自动限流功能,提升了输入电压动态响应速度,仿真及实验结果验证了电流型BF-PTM 控制的优越性。
[1]杨旭,裴云庆,王兆安.开关电源技术[M].北京:机械工业出版社,2004.
[2]Smedley K M,Ćuk S.One-cycle control of switching converters[J].IEEE Transactions on Power Electronics,1995,10(6):625-633.
[3]Castilla M,De Vicuna L G,Guerrero J M,et al.Designing VRM hysteretic controllers for optimal transient response[J].IEEE Transactions on Industrial Electronics,2007,54(3):1726-1738.
[4]Castilla M,De Vicuna L G,Guerrero J M,et al.Simple low-cost hysteretic controller for single-phase synchronous Buck converters[J].IEEE Transactions on Power Electronics,2007,22(4):1232-1241.
[5]Tan S C,Lai Y M,Tse C K.General design issues of sliding mode controllers in DC-DC converters[J].IEEE Transactions on Industrial Electronics,2008,55(3):1160-1174.
[6]Telefus M,Shteynburg A,Ferdowsi M,et al.Pulse trainTM,a novel digital control method,applied to a discontinuous mode flyback converter[C].IEEE Power Electronics Specialists Conference,2003,1141-1146.
[7]Ferdowsi M,Emad Ai,Telefus M,et al.Pulse regulation control technique for flyback converter[J].IEEE Transactions on Power Electronics,2005,20(4):798-805.
[8]Khaligh A,Rahimi A M,Emadi A.Modified pulse-adjustment technique to control DC-DC converters driving variable constant-power loads[J].IEEE Transactions on Industrial Electronics,2008,55(3):1133-1146.
[9]杨汝,张波,丘东元.混沌开关变换器EMI动态频谱的小波分析[J].电工技术学报,2007,22(11):110-116.Yang Ru,Zhang Bo,Qiu Dongyuan.Wavelet analysis of dynamic EMI spectrum in chaotic switching-mode converter[J].Transactions of China Electrotechnical Society,2007,22(11):110-116.
[10]Qian Z M,Wu X,Liu Z Y,et al.Status of electromagnetic compatibility research in power electronics[C].Power Electronics and Motion Control Conference,2000:46-57.
[11]Barragán L A,Navarro D,Acero J,et al.FPGA implementation of a switching frequency modulation circuit for EMI reduction in resonant inverters for induction heating appliances[J].IEEE Transactions on Industrial Electronics,2008,55(1):11-20.
[12]吴振军,胡智宏,崔光照.基于混沌反控制降低Buck型变换器EMI及纹波研究[J].系统仿真学报,2008,20(4):993-996.Wu Zhenjun,Hu Zhihong,Cui Guangzhao.Research on reducing EMI and output voltage ripple of buck converter based on anti-control of chaos[J].Journal of System Simulation,2008,20(4):993-996.
