道路速度一致性评价指标模糊化评价方法
2012-07-05赵琳琳李海琼
赵琳琳,李海琼
(昆明理工大学交通工程学院,云南昆明650500)
对道路进行安全评价是道路安全运行的保障,安全评价的方法很多,如相对事故率法、史密德回归模型和IHSDM模型等。而交通安全本身就是一个模糊的概念,安全与不安全的之间不能说有明确的界限[1]。一般道路交通安全评价中大多是用运行速度一致性或运行速度与设计速度一致性进行评价,但是这些评价对道路交通安全的划分过于绝对,这样会掩盖很多潜在的、有价值的信息。本文在此基础上引用模糊数学理论对交通安全进行模糊评价。
1 模糊逻辑理论
LA Zadeh在1964年提出了模糊集合的概念。其中模糊理论是以模糊集合为基础,其基本精神是接受模糊性现象存在的事实,而以处理模糊不清的事物为主要研究目的。模糊不清的概念在时间、空间、条件上具有可变性[2]。例如在对年龄或是温度的划分中,古人云“人生七十古来稀”,认为70岁是对老年的一个隶属程度,但对于今天的人们来说70这个隶属程度相对较小,具体多少年龄来确定老年这个界限就是一个模糊的概念。
交通安全的评价也是一个模糊的、不清晰的系统,在运用速度一致性进行交通安全评价中,一般以运行速度与设计速度差的大小为评价标准,这里用的运行速度是指路段上85%分位车速,若运行速度与设计速度差小于10 km·h-1,则认为道路安全程度好;若运行速度与设计速度差在10~20k km·h-1之间则认为道路安全程度一般;若运行速度与设计速度差大于20 km·h-1则认为道路的安全程度为差。在评价中如果运行速度和设计速度差为19.9 km·h-1或20.1 km·h-1,两者相差不大,对于驾驶员在道路上的安全感受变化不明显,但在交通安全评价中则认为前段道路的交通安全程度一般,而后者的交通安全程度差,这样的评价结果显然是不合理的。而引入模糊理论对交通安全进行评价可以实现评价指标在10 km·h-1,20 km·h-1的缓慢过度,使安全评价的信息得到更充分的利用。
2 模糊安全评价
2.1 模糊集合的确定
文中选用的是运行速度与设计速度差值为安全评价指标,差值越小越安全,反之差值越大安全性越低,因为在一般评价中认为运行速度与设计速度差大于20 km·h-1则认为道路的安全程度为差,所以当速度差一般速度差值达到35 km·h-1以上认为道路是不安全的,任何人都是没有疑问的,所以先可以假设论域U=[0,∞),在论域上建立评价安全的模糊集合:A=“安全程度好”,B=“安全程度一般”,C=“安全程度差”[3]。
2.2 速度一致性评价指标模糊化
速度一致性评价指标模糊化,即在原有的速度一致性评价指标的基础上,对速度一致性评价指标的界限值10 km·h-1,20 km·h-1进行缓和过度,根据模糊理论,使评价指标边界模糊化[4]。由于交通安全模糊评价的模糊集合在实数域的范围内,使指标界值模糊化,即使指标的变化呈现一种线形变化的形式。根据模糊逻辑理论,指标线形变化的形式有三角变化及梯度变化等,文中选取的速度一致性指标模糊化方法为三角形和梯度隶属函数组合[5]。
图1为速度一致性指标模糊化后的线形函数图[5],图中线形“优”表示的模糊集合是A,线形“良”表示模糊集合B,线形“差”表示模糊集合C。根据模糊逻辑理论,由于在速度评价指标中小于10 km·h-1为好,所以模糊化后A的模糊分布应该为偏小型,同理,B的模糊分布为中间型,C的模糊分布为偏大型,图1满足以上分布要求,文中可以采用其为模糊指标的线形函数(隶属度函数)[7]。
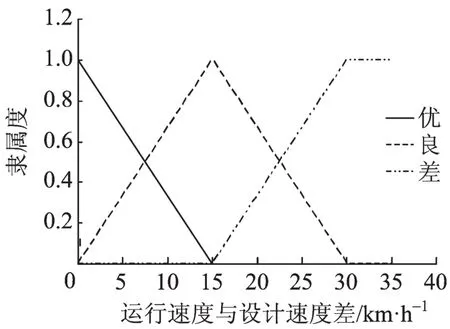
图1 道路速度一致性评价模糊化线形函数图Fig.1 Fuzzy linear function of road speed consistency evaluation
指标模糊化的结果如下:
速度评价指标小于10 km·h-1的模糊函数:(x:运行速度与设计速度差值)

速度评价指标在10 km·h-1~20 km·h-1的模糊函数

速度评价指标大于20 km·h-1的模糊函数

2.3 模糊安全评价区域的划分
评价指标模糊化后会发现,模糊集合A中有部分区域与模糊集合B相交,同样的模糊集合B中也有部分区域与模糊集合C相交,根据模糊集合相交的情况可以将划分为5个评价区域。在有模糊集合重复的区域,对比重复区域的函数值,根据模糊逻辑中隶属度(模糊函数值)最大化原则,判断函数值属于哪个模糊集合,通过模糊集合判断交通运行的安全性[8-9]。利于模糊函数,对于处于同一集合函数值,也能根据函数值的大小判断其安全性,不同安全等级的划分结果如下:
1)第1安全等级:0≤x<7.5,A的安全隶属度最大,其隶属度函数为F(x)=(15-x)/15,此时隶属度越大,安全性越高。
2)第2安全等级:7.5≤x<15,B的安全隶属度最大,其隶属度函数为F(x)=x/15,由于此时的隶属度是从好到一般过渡,所以第2安全等级的隶属度以小为好,隶属度越小,安全性越高。
3)第3安全等级:15≤x<22.5,B的安全隶属度最大,其隶属度函数为F(x)=(30-x)/15,隶属度越高表示道路安全。
4)第4安全等级:22.5≤x<30,C的安全隶属度最大,其隶属度函数为F(x)=(x-15)/15;此时的隶属度是从一般到差的过渡,所以第4安全等级的隶属度以小为好的原则,C的隶属度越高,道路安全性越低。
5)第5安全等级:x≥30时,属于模糊集合C,隶属度的值为1,在道路安全中不应出现这样的道路线形。
以上安全等级的优良排序为1>2>3>4>5,具体的评价指标如表1所示。
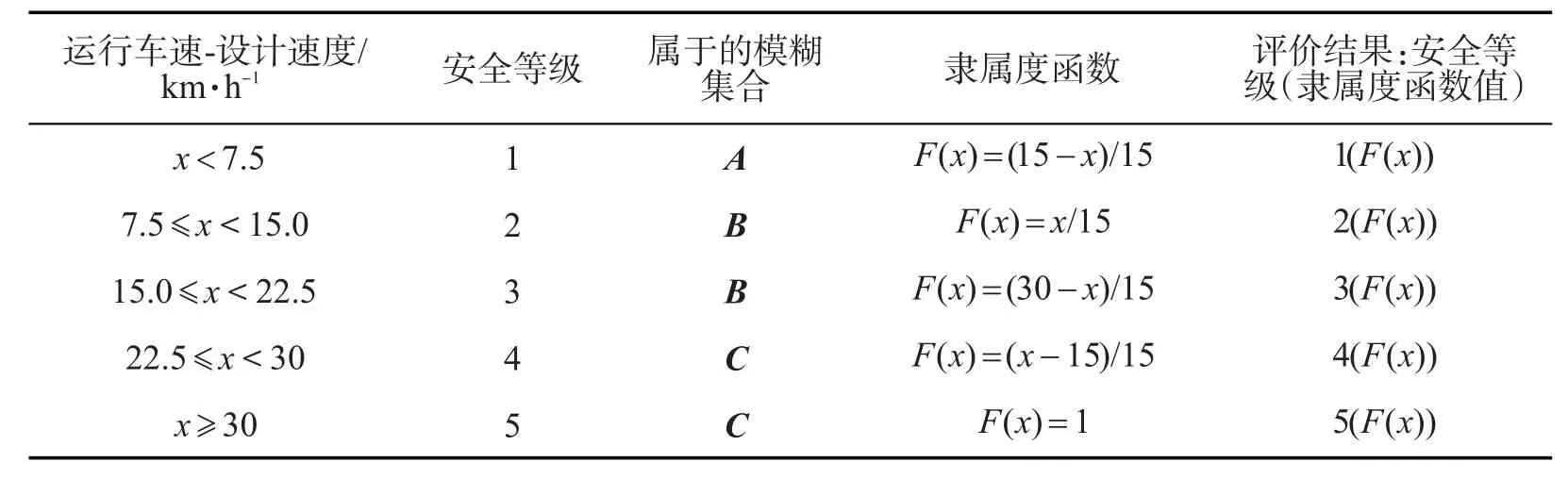
表1 模糊安全评价指标Tab.1 Fuzzy security evaluating indicator
3 实例
选取安楚路上某连续路段为例,其中以运行速度与设计速度差为评价指标,数据指标来源于文献[10]的附表7[10],根据一般道路评价标准,评价结果如表2所示。
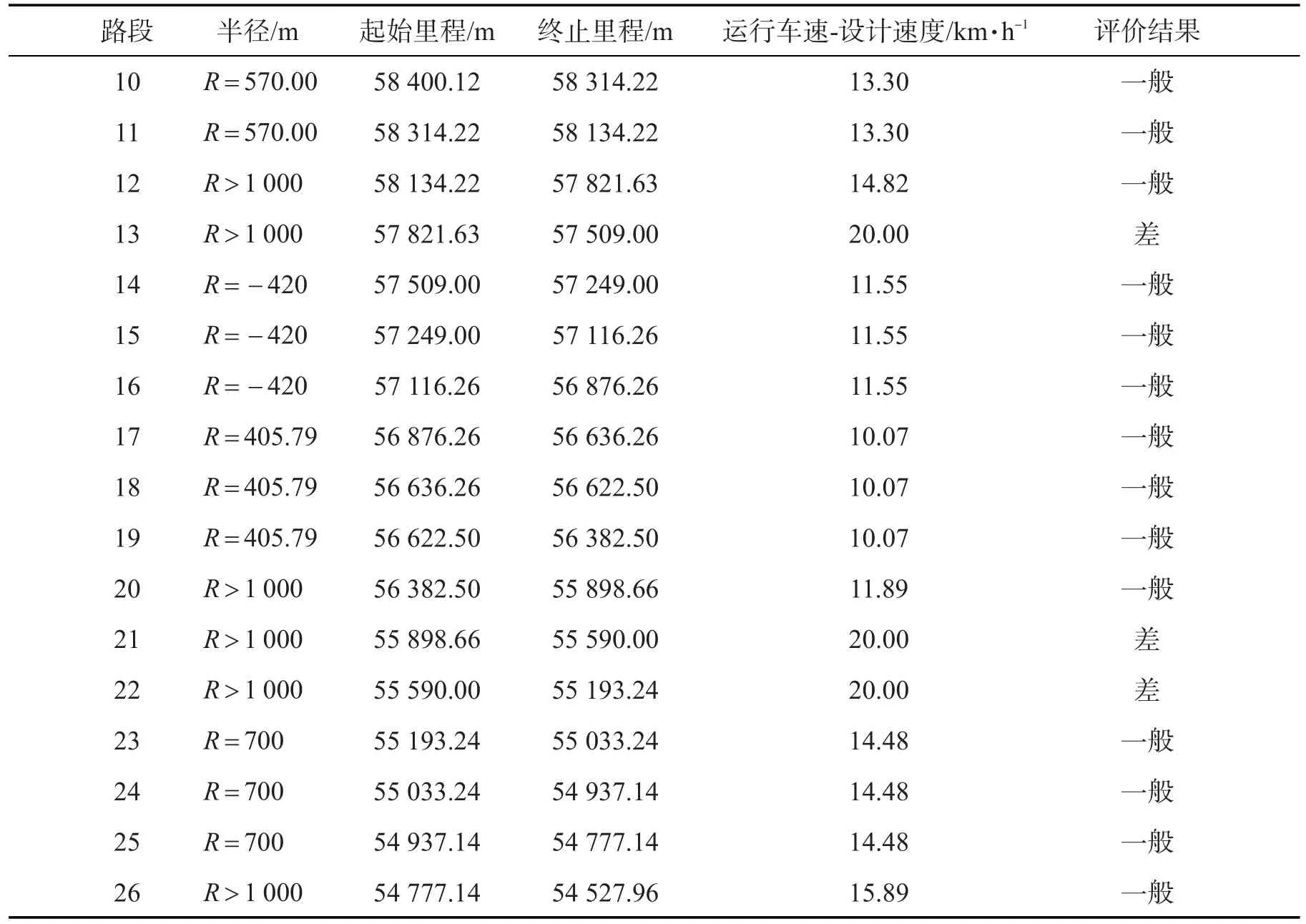
表2 运行速度与设计速度差的道路安全评价Tab.2 Road security of running speed and designing speed difference

续表2
用模糊逻辑理论对上述路段进行模糊安全评价,将相应数据代入隶属度函数计算不同模糊集合的隶属度,根据隶属度判断其安全等级,确定其安全性。其安全评价的结果如表3所示。
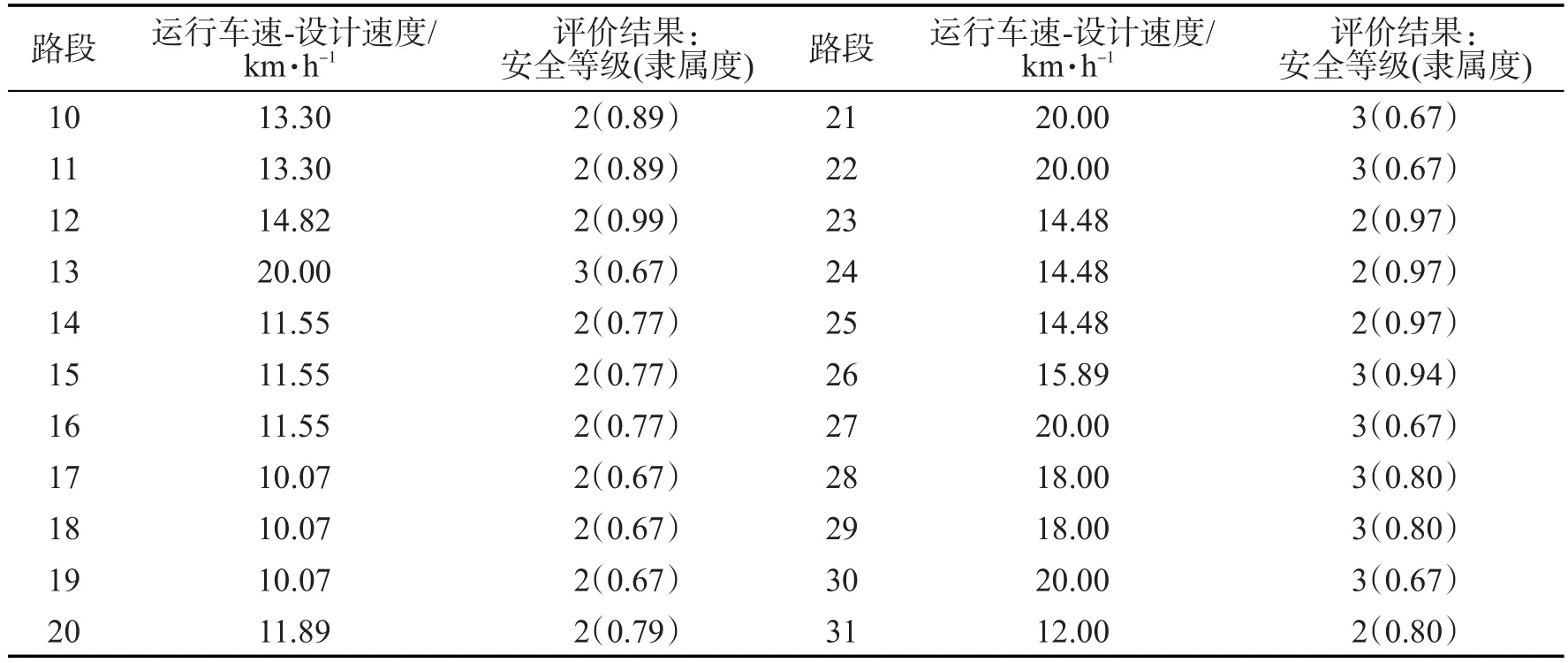
表3 模糊理论道路安全评价Tab.3 Road security evaluation of fuzzy theory
从表4中的评价结果可以看出在运行速度与设计速度评价中把评价的路段分为两类,一般和差的路段,同一评价结果的路段无法再具体的划分其优良性。

表4 运行速度与设计速度评价和模糊安全评价对比Tab.4 Comparison between running speed,designing speed and fuzzy security evaluation
一般的路段:10,11,12,14,15,16,17,18,19,20,23,25,26,28,29,31。
评价为差的路段:13,21,22,27,30。
而在模糊安全评价中根据安全评价等级,对于安楚路的路段可以明确划分为2个等级,并且在同一等级中可以得到更细的道路优良排序。
其中2级路段根据优良排序为:
2(0.67 )>2(0.77)>2(0.79)>2(0.80)>2(0.89)>2(0.97)>2(0.99),即在2级道路中(17,18,19)>(14,15,16)>(20)>(31)>(10,11)>(23,24,25)>(12)。
3级路段根据优良排序为:
3(0.94 )>3(0.8)>3(0.67),即路段(26)>(28,29)>(13,21,22,27,30)。
对于在表中出现3级的评价结果,都是在半径R>1 000的路段,在半径大的路段预测的运行速度变化也较大,所以出现不同的隶属度等级的跳跃,同时把在运行速度与设计速度评价中为差的13,21,22,27,30路段划分在3级路段,表明这几段路的安全性比速度一致性评价标准的安全性要好,表现了模糊理论中的模糊过渡性。
4 结语
通过实例分析表明,运用模糊逻辑理论中的隶属度等级可以对道路安全进行评价,能更细致的划分道路安全等级,更充分的利用了道路交通安全的信息。根据隶属度等级安全评价可为交通安全的改善提供优先次序,为道路安全建设提供有利数据支撑。
[1]刘运通.论道路交通安全的宏观评价[J].中国公路学报,1995,8(1):158-162.
[2]陈守煜.可变模糊集理论与模型及其研究[M].大连:大连理工出版社,2009:2-3.
[3]胡启洲,张卫华.高速公路交通安全的模糊区间评价[J].中国安全科学学报,2007,17(8):26-31.
[4]阎善郁,于君磊,潘科.可变模糊集理论在道路交通安全综合评价中的应用[J].安全与环境学报,2010,10(6):231-233.
[5]杜玲玲.混合超启发式法求解大规模VRP的优化研究[J].华东交通大学学报,2011,28(1):62-67.
[6]GULLEY N,JANG J S.Fuzzy-logic toolbox[R].Natick:The Math Works Tnc,1995.
[7]邵烈,杨龙才,王丙龙.软土地区无碴轨道线路桥梁桩基础沉降规律和预测分析[J].华东交通大学学报,2011,28(2):6-13.
[8]王琰,郭忠印.基于模糊逻辑理论的道路交通安全评价方法[J].同济大学学报:自然科学版,2008,36(1):47-51.
[9]马健霄,孙伟,韩宝睿.城市道路交通安全模糊评价指标体系建立及应用[J].森林工程,2008,24(1):65-67.
[10]李瑞平.高速公路车速仿真及一致性分析[D].昆明:昆明理工大学,2006:65-71.