调频连续波雷达距离-速度配对方法
2012-07-03潘勇先朱子平
潘勇先,朱子平
(中国电子科技集团 第38 研究所,安徽 合肥 230088)
LFMCW 雷达具有体积小、重量轻、结构简单、分辨力高和无距离盲区等优点,但受到处理方法的限制以及调频线性度的影响,通常只能应用于近程测距系统中。另外,单一调频斜率的LFMCW 信号存在着距离-速度耦合现象,将导致运动目标的测距偏移问题,该问题可通过采用对称LFMCW信号加以解决,但同时也引入了多目标环境下的配对问题[1-4]。
本文通过研究线性调频连续波雷达的信号处理,提出了一种三角调频连续波雷达目标差拍幅度谱中心频率幅度谱值配对方法来校正多普勒频率造成的测距误差,并给出了计算机仿真结果。
1 基本原理

图1 三角调频连续波雷达频率时间关系
设雷达发射线性调频连续波信号,雷达载频为f0、调频带宽为B、调频间隔为T,正向调制和负向调制交替发射,视频信号的频率与时间关系如图1所示,其中发射信号用细实线表示,目标回波信号用粗实线表示,有多普勒频率时的目标回波信号用粗虚线表示。
在上扫频段周期内,线性调频连续波雷达发射信号在有效区间Te,up=[-T/2,T/2]可以表示为:

其中,f0,A0,φ0,up分别代表发射信号的频率、振幅和随机初相,μ=B/T为调频斜率。
一个匀速运动目标,以径向速度v 接近雷达(以远离雷达方向为正方向),在t=0 时刻目标斜距为R0,回波延迟为τ(t),多普勒频率为fd=2v/λ,则接收到的目标回波信号Sr,up(t)在有效区间Te,up内可以表示为:

其中,Kr常量与目标反射强度和传播衰减有关,φ0,up代表目标反射引起的附加相移,τ(t)=2(R0+vt)/c为目标的延时函数。
对差拍信号进行傅立叶变换:
同理可以证明,在发射信号一个扫频周期内,三角线性调频信号下扫频段频谱为:

线性调频连续波雷达上扫频段差拍信号的回波中心频率为fb,up=2μR0/c+2vf0/c,线性调频连续波雷达下扫频段差拍信号的回波中心频率为fb,down=-2μR0/c+2vf0/c-μ2vT/c。当fd=0 时正向调制和负向调制回波差拍信号的中心频率大小相等、符号相反,不会引起测距误差;当fd≠0 时会引起测距误差,正负向调制回波信号的测距误差大小相等、符号相反。如果能够估计出正负向调制回波信号的中心频率,则取二者的平均值就可以消除测距误差,困难在于如何判断正负向调制的回波为同一目标所产生,下面针对这一问题提出频谱配对方法。
2 频谱配对方法
由式(3),(4)知同一目标的正向调制段和负向调制段产生的差拍信号频谱Sb,up(f),Sb,down(f)具有相同的幅度和形状,在实际应用环境中由于目标起伏及天线扫描等多方面的影响,可能会出现两个频谱的幅度不完全相同的情况,但是同一目标产生的回波频谱的幅度在正/负调制段总是具有最大的相似性,根据这一点就可以在正/负调制段分别得到的差拍信号频谱中找到同一个目标产生的谱线。
这里采用的方法是寻找差拍幅度谱中心频率对应的幅度谱之值,相同目标产生的差拍幅度谱中心频率对应的幅度谱值积总是相近的。设第M个目标在正向调制阶段产生的差拍信号幅度谱采样值序列为{SM,up(1),SM,up(2),…,SM,up(n)},中心频率对应的幅度谱值为:

其中Δf为频域采样间隔。负向调制段差拍信号幅度谱中心频率对应的幅度谱值为:

由前面分析可知,AM,up和AM,down的值最接近。由式(5),(6)求出N个目标的差拍幅度谱中心频率对应的幅度谱值矩阵A为:

正向调制段各个差拍幅度谱中心频率幅度谱值与负向调制段各个目标差拍幅度谱中心频率幅度谱值的差矩阵ΔA为:
其中ΔAi,j=Ai,up-Aj,down。
对于正向调制段的第i个差拍回波幅度谱中心频率对应的幅度谱值差向量ΔAi,i=1,2,…,N,如果ΔAi,k是向量中最小的,那么可以认为正向调制段中的第i个差拍回波和负向调制段中的第k个差拍回波是由同一个运动目标产生的。
3 测量误差校正
对于运动目标1,设其频谱配对后的正负向调制回波频率为f1,up和f1,down,由前面的分析知目标实际距离对应的差拍频率为:

对应的距离为:

通过上/下扫频段的频率差可以得到目标1的多普勒频率f1,d=(f1,up-f1,down)/2,又因为fd=2v/λ(λ=c/f0),所以目标1的径向速度为:

通过式(10)和(11)就可以确定出目标1的真实距离和径向速度。
用同样的方法可以得到其他N-1个目标的真实距离和运动速度。这样就能成功地将一个距离段中不同距离不同速度的目标区别开来,从而消除了线性调频连续波雷达的距离-速度耦合。
4 计算机仿真

表1 仿真系统参数
计算机模拟的系统参数如表1所示。设在距离为4000 m和9000 m 处有两个运动点目标,速度分别为-200 m/s,-130 m/s(向雷达方向运动为负),回波幅度分别为0.8和0.5;在5000 m 处有固定点目标,回波幅度为1.2。正负调制回波差拍信号16384 点FFT的频谱如图2(a),(b)所示。
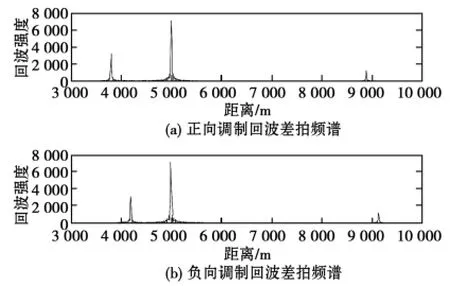
图2 目标回波差拍信号频谱
在图2(a)中按照谱峰的频率由小到大排列分别称为目标1+,目标2+和目标3+;在图2(b)中按照谱峰的频率由小到大排列分别称为目标1-,目标2-和目标3-,计算出差拍频谱中心频率对应的幅度谱值和值的差见表2和3。

表2 回波差拍频谱中心频率频谱值

表3 回波差拍频谱中心频率频谱差值
按照幅度谱差值最小的原则配对为:目标1+和目标3-配对;目标2+和目标2-配对;目标3+和目标2-配对。
按照式(10)和(11)校正后的目标距离和速度见表4。仿真结果是在不同信噪比下进行的,表5 说明了在不同信噪比下配对结果的正确性。
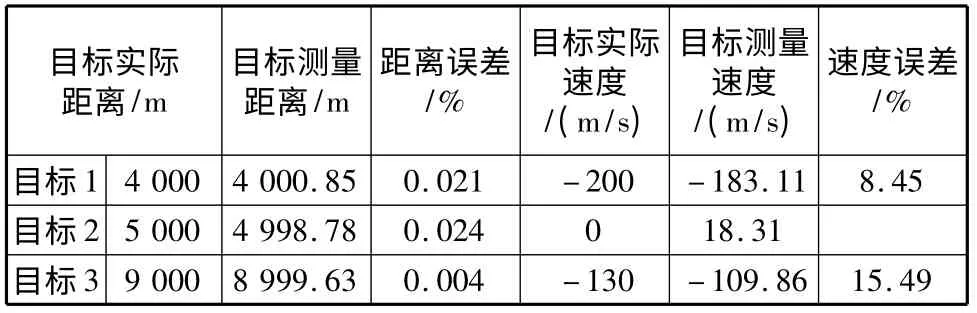
表4 校正后的目标距离和速度

表5 不同信噪比下仿真结果正确性
从表4 可以看出利用上下扫频段的频谱的相似性,采用频谱最大峰值配对算法可以获得目标的距离和速度。根据理论分析知道,在两个目标回波的幅度差别不大时,可能会造成频谱配对错误。但在仿真中发现,当两个目标回波幅度相同或相近时,还是可以通过上面的方法进行频谱配对而不出现错误。但是该方法的目标配对单靠上下扫频频谱峰值来确定,对处于同一距离而具有不同速度的目标,将出现较大的测距误差,对于高密度目标的情况较难配对成功,而且运算量很大,难适应大量目标的场合。由于目标运动有可能出现目标距离谱重叠,也可能造成频谱配对错误。这些尚需进一步的分析。
5 结论
按照正负相间频率调制连续波雷达回波差拍信号的频谱特点提出了一种目标回波频域配对及连续波雷达多普勒测距误差校正的方法,理论分析和仿真实验结果表明该方法能够有效地校正多普勒效应引起的距离测量误差。
[1]包敏.线性调频连续波雷达信号处理技术研究与硬件实现[D].西安电子科技大学硕士论文,2009.
[2]徐小平,刘建新,韩宇,等.FMCW 测距雷达数字信号处理器设计仿真[J].信息与电子工程,2004(6):133-135.
[3]马晓岩,向家彬,朱裕生.雷达信号处理[M].长沙:湖南科学技术出版社,1999.
[4]史林,张琳.调频连续波雷达频谱配对信号处理方法[J].西安电子科技大学学报,2003,30(4):534-538.