车辆多体动力学仿真中的路面模型构造方法的研究
2012-07-03魏来生赵韬硕
陈 超,魏来生,赵韬硕
(中国北方车辆研究所,北京 100072)
车辆在越野路面上行驶特别是高速行驶时,由不平路面输入的垂直激励通过车轮及悬架系统传递给车体,引起车辆的振动.这些振动将影响车辆在越野路面上的行驶速度、限制发动机动力性能的发挥.路面不平度是车辆垂直响应的主要输入,因此建立更加符合实际越野路面特点的三维路面模型就成了进行车辆平顺性、机动性仿真研究的基础.
由于常用多体动力学软件中提供的路面模型数量有限,难以满足车辆仿真的所有要求,实际工作中常常需要用户根据自己需要构造更加符合实际的路面模型.本文将以实际采集的一段越野路面不平度数据为依据对常见的几种路面模型构造方法进行分析比较,并说明其各自特点.
1 实际路面数据的采集
本文使用双轨路形计对某试验场路面不平度数据进行采集,该仪器具体结构如图1所示[1].
该仪器将陀螺放置在车辆的悬挂之上,以减小路面冲击的影响,提高陀螺的寿命和测量精度,并使之作为测量路面的水平基准.叶片弹簧通过托臂给摆架加载,使摆架上两测量轮保持与路面接触,摆架可相对于托臂摆动.托臂和摆架总成有左右两套,分别测量左右两侧路面的不平度;两摆架间距在1 462~1 852 mm间连续可调,以适应不同车辆对待测路面两侧间距的要求.
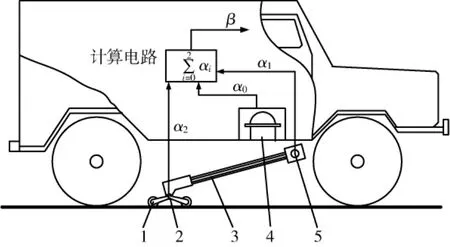
图1 双轨路形计
路形计具体的工作原理如图2所示.

图2 路形计工作原理图
图中ΔL为路形计前后两轮轮距即采样间隔;α0为陀螺相对车架的夹角;α1为托臂相对车架的夹角;α2为摆架相对托臂的夹角.对上述各角度求和(其中α1取负值)可得路面与水平基准之间的夹角β为:

则可计算出任意瞬时前后两轮处的高度差ΔY为:

若给定初始条件Y0=0,则有:


从而得到路面不平度的递推公式为:

利用上述双轨路形计对某试验场的一段试验路面进行了测量.该路面全长70 m,采样间隔为150 mm.通过对采集来的数据进行处理,去除其中的奇异点和趋势项后得到了左右两侧路面不平度数据如图3所示.由于路面数据太长,在实际建模中采取了分段建模的方法.

图3 实测的左右两侧路面不平度数据
2 三维路面表示形式
在当前主流多体动力学软件中,三维路面一般都被离散成有限个三角形单元,其中每个单元都由3个作为顶点的节点 (实际模型中各节点位置须根据实际采集的试验场路面不平度数据确定)和1个单位法向量所定义.
图4为由8个节点和6个三角形网格单元构造的路面模型.在理论上任何形状的道路都可以通过有限个节点之间的三角形单元组合来表示,因此研究在多体动力学软件中构造路面模型的方法实际上就是研究三角形单元的生成和拼接方法[2].

图4 由三角形网格单元构造的路面模型
图5是一个三角形网格单元及其法向量.其中这个三角形单元的平面方程为

式 (6)中3个系数a1、a2和a3是由图5中的3个节点的坐标通过克莱姆法则确定的,具体算法如下:

式中:

由此得出平面的法向量为
3种立竹密度竹林出笋情况的调查结果见表4。从表4可以看出,在3种密度处理中,立竹密度越大,所发笋的形态越小,产笋量越低,说明立竹数越多,营养空间减小,从而影响竹子发笋[5-6]。从笋品质上看,密度越大的林分所产的笋,其可食部分所占比例也越小;从新竹生长情况看,密度大的林分,新竹高生长强烈,但地径则减小,呈“苗条”状。由此可见,竹林密度影响四方竹的笋产量和质量。

法向量n的作用是确定路面模型的方向,即路面模型与车轮的接触面的朝向.

图5 三角形单元的法向量
3 路面模型的构建方法
3.1 软件配备的路面模型库
多体动力学软件一般都为用户提供了一个路面模型库供用户参考或选择使用,需要时用户直接调用模型库中的相应路面文件即可在软件中构造出相应路面.图6是RecurDyn路面模型库所提供的路面模型.
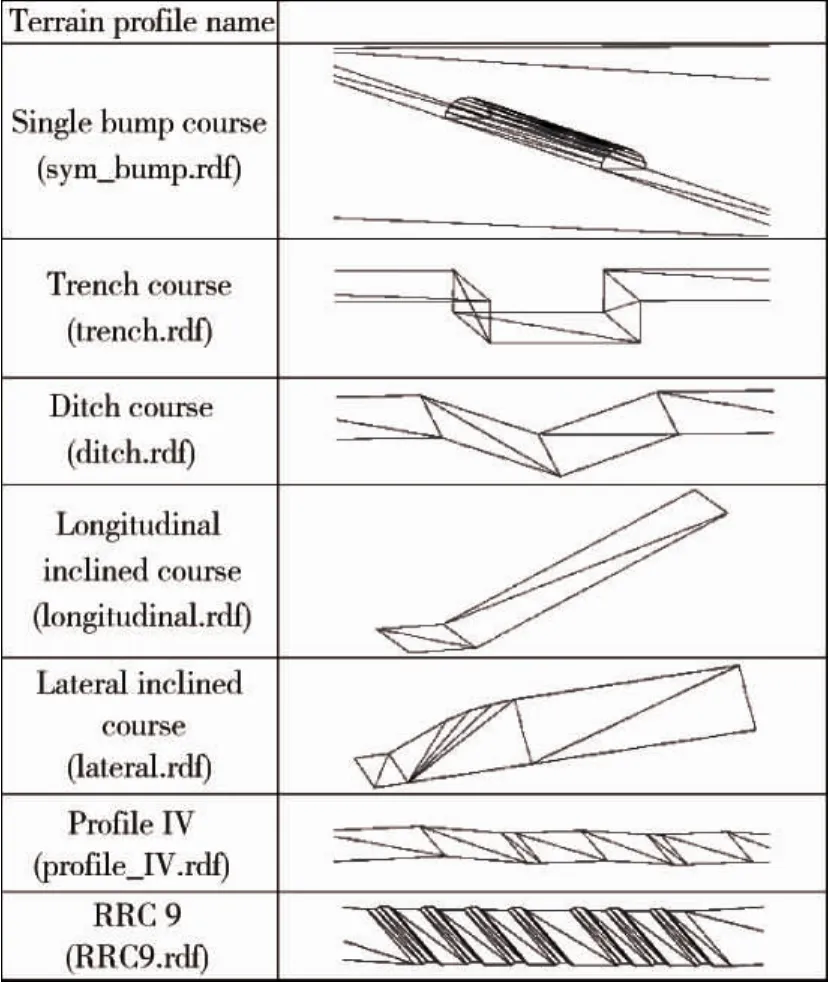
图6 RecurDyn所提供的路面模型
3.2 平行样条线法
由于软件配备的路面模型库中模型数量和种类的限制,在实际工作中必须研究如何在多体动力学软件中构造所需的路面模型.在多体动力学软件中,最简单的路面构造方法是平行样条线法.平行样条线法是以实测的试验路面不平度数据为基础建立样条线,并将该样条线在车辆的横向方向上进行平移.软件将自动对两样条线上的各节点进行排序并在两样条线之间依次生成若干个连续的三角形网格单元,如图7所示 (路面模型中使用了图3中右侧0~10 m的数据进行分段建模).

图7 平行样条线法构造的路面
图7为利用平行样条线法构造的路面.由于第二条样条线是通过复制得到的,在此不存在两条样条线节点数目是否相等的问题.但是这种方法只利用了一组路面不平度数据,因此只能表现出单一的不平度特性.利用这种路面对车辆进行仿真时,左右两侧的车轮所经历的路面是一样的,这与实际的路面和试验条件不符.
3.3 独立样条线法
前已说明,平行样条线法不能如实反映车辆左右两侧车轮所经历的路面形状.作为改进,我们要将车辆左右两侧路面不平度数据都应用到路面模型构造中.通过读取测得的左右两侧不平度数据,在路面模块中分别建立两条节点数相同且彼此相互独立的样条线并在这两样条线之间生成路面模型,如图8所示 (路面模型中使用了图3中双侧0~10 m的数据进行分段建模).
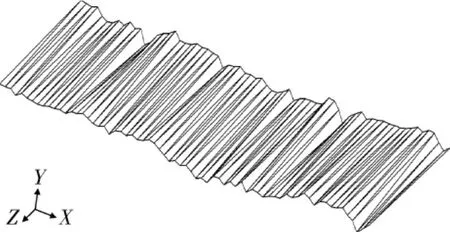
图8 独立样条线法构造的路面
构造图8路面的过程中利用了两条独立的样条曲线,因此图8路面能够较好地描述路面形状.当车辆在图8路面上进行行驶仿真时,两侧车轮所经过的路面是不一样的,所得出的响应也将接近于实际情况.然而图8路面在横向上有一定的坡度,仿真时两侧车轮所经历的路面并不是完全独立的而是有较强的相关性;路面的倾斜也将导致车轮与地面的接触关系变得过于复杂,因此图8路面模型还是不能理想地反应出实际路面的情况.
3.4 路面文件综合构成法
为了得到车轮与路面接触关系简单、且能使两侧车轮所经历路面拥有独立的不平度的理想路面模型,下面将介绍路面文件综合构成法.路面文件综合构成法以左右两侧不平度数据为基础,采用平行样条线法分别构造左右两侧车轮下的路面,每侧路面的宽度为轮胎宽度 (实际中须略宽一些),两路面间距为车辆的轮距 (实际中须略窄一些);然后在两路面间构造出不影响车辆与路面接触关系的凹陷沟槽,利用该沟槽将两独立路面拼接起来,如图9所示 (路面模型中使用了图3中双侧0~10 m的数据进行分段建模).图9所示路面能够充分反应出两侧车轮各自所经历路面的不平度信息.仿真计算时车辆左右两侧车轮所经历的路面是完全独立的,大大提高了仿真计算的精确度;且两侧路面是由平行样条线法分别获得的,单侧车轮所经路面没有横向坡度,从而也使车轮与地面的接触计算相对简单.

图9 路面文件综合构成法构造的路面
理论上只要正确定义各节点的序号和坐标并合理地利用节点构造的三角形单元,通过编辑路面文件就能够构造出任意形状的路面模型 (包括之前所述的平行样条线法和独立样条线法构造的模型).然而路面模型往往拥有成千上万个节点以及由这些节点组成的大量三角形单元,通过人工输入的方式逐一描述节点信息并构造三角形单元显然不切实际,本文利用MATLAB编写了一个能够自动读取路面不平数据并生成路面文件的程序,如图10所示.此程序先根据输入的车轮宽度、轮距、采样间隔结合通过读取路面不平度数据确定各节点的三维坐标并生成路面节点 (Nodes),依据生成的节点再结合输入的路面动静摩擦因素生成三角形单元网格 (Elements),最后输出相应的路面文件.

图10 MATLAB程序流程图
4 结论
在多体动力学软件中可以通过直接调用路面数据库、或者采用平行样条线法和独立样条线法及编写路面文件法构造路面.通过前面的论述可知:直接调用数据库路面文件最为方便,但数据库中路面模型十分有限,并不能满足实际工作的需求;平行样条线法虽然简单,但由于左右两侧车轮所经历路面完全相同而与实际情况不符;独立样条线虽然考虑了左右两侧路面的区别,但左右车轮所经路面具有一定相关性同时路面的倾斜也导致车轮与地面的接触关系过于复杂.路面文件综合构成法可以构造任意形状的路面,因此此种方法能够生成拥有复杂外形和有特殊要求的三维路面模型,能够很好地适应实际工作中对路面模型的要求;然而由于编写路面文件时涉及的节点数众多且单元的构造过程复杂、繁琐,因此必须编写路面文件生成程序来自动读取路面不平度数据并生成相应路面文件.
[1]赵济海,王哲人,关朝雳.路面不平度的测量分析与应用[M].北京:北京理工大学出版社,2000.
[2]李 军.ADAMS实例教程 [M].北京:北京理工大学出版社,2002.
