航空相机稳定平台控制算法设计及其像移补偿
2012-07-03张振东刘廷霞
张振东 ,徐 涛 ,李 博 ,刘廷霞
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春130033;2.中国科学院研究生院,北京100039)
航空相机在高空执行拍摄任务时,像移、曝光量、离焦、图像传感器噪声等因素都会影响到成像质量,其中对图像质量影响较大的是像移。产生像移的原因有多种,如姿态角速度变化、载机的运动及振动等。而载机的前向运动及姿态角速度是前向像移产生的主要原因。两轴稳定平台中,横滚轴的位置闭环保持相机横滚方向垂直地面,克服载机横滚角速度对相机的干扰。俯仰轴的速度闭环既要克服载机俯仰方向的角速度干扰,又要根据飞行高度和地速进行速度回扫补偿飞行过程中的前向像移。
当载机在典型飞行速度v=750 km/h、典型飞行高度h=20 km下飞行时,俯仰轴应补偿的前向像移角速度应满足如下关系[1-2]:

该航空相机有拍摄和等待两个工作状态。当处于拍摄状态时,相机回扫(俯仰轴),补偿前向像移;当处于等待状态时,相机保持与水平面垂直。为保证速度回扫和定位时相机平台的稳定,采用速度位置双闭环控制方法。在俯仰轴和横滚轴上分别安装陀螺和光栅编码器,陀螺测量平台相对惯性空间的角速度,把陀螺值反馈到速度闭环(内环)就可以克服载机姿态角速度的干扰。位置环(外环)则根据编码器值和上位机发来的载机姿态角信息来控制相机与水平面的垂直。
1 稳定平台工作原理
1.1 稳定平台功能概述
航空相机稳定平台的任务是隔离载机的扰动,保持稳定平台的稳定,并同时接收上位机的指令和飞行参数,实现相机的像移补偿功能。利用陀螺的“空间测速机”功能实现速度闭环、隔离载机扰动,使相机在惯性空间内保持稳定。稳定平台控制系统工作原理图如图1所示,两轴的工作原理相同。

根据相机的工作状态来改变稳定平台的控制状态,即当相机处于拍摄状态时,控制系统根据上位机给定的速高比算出补偿速度,并将其作为速度闭环控制的给定,而陀螺敏感两轴惯性空间的角速度作为速度闭环控制的反馈,两者的差值经速度控制器输出PWM(脉宽调制)波,经功率级放大后驱动伺服电机,实现平台在惯性空间内的稳定;当相机处于等待状态时,上位机发来的载机姿态角值(载机横滚角和俯仰角)经过换算后作为位置闭环的给定,而两轴编码器值作为位置闭环的反馈,两者的位置差经位置控制器后作为速度环的给定[3-4]。
相机拍照的时序图如图2所示。稳定平台进行像移补偿的具体过程为:该相机拍照电平周期为1 s,对应相机的曝光周期。相机曝光发生在200 ms时刻,持续时间为20 ms,到220 ms处曝光结束。
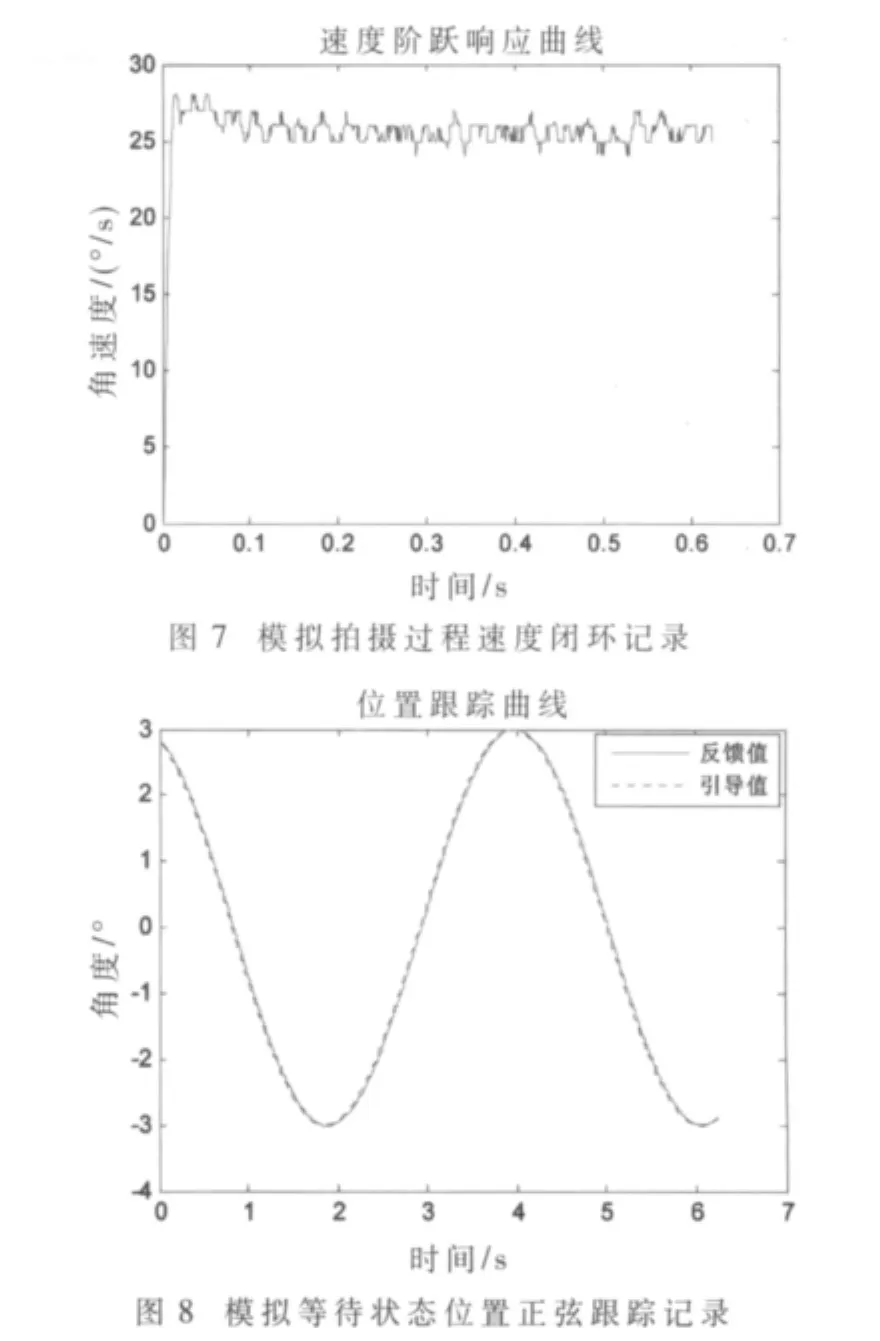
稳定平台需要在相机曝光瞬间以像移补偿速度控制相机镜头向后摆扫,以实现像移补偿。为此,稳定平台在每个拍照周期开始时转入速度环控制,并在200 ms内使速度稳定到像移补偿速度,其阶跃响应速度如图7所示,在200 ms内可达到速度稳定。曝光结束后,稳定平台检测到拍照电平为低,此时转入位置环控制将相机镜头返回到垂直向下的位置。
此后每一个拍照周期,稳定平台执行相同的动作。当稳定平台收到拍照停止指令后,返回至稳定工作模式,相机镜头稳定到垂直向下位置。
1.2 陀螺采样的数字滤波
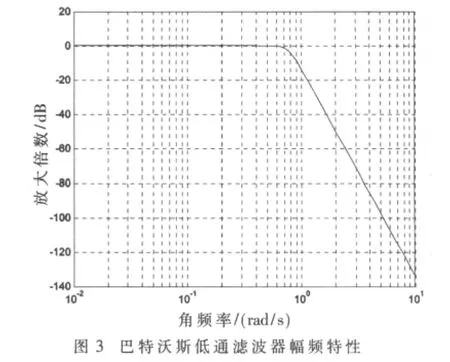
陀螺采样值的精度直接影响速度闭环的精度,而由于数据传输过程、电磁干扰和A/D转换精度等原因,其测量数据中不可避免地混入噪声。为保证平台的速度稳定精度,需要对陀螺采样值进行滤波,以减少随机噪声的影响。在高速DSP控制系统中,数字滤波器相对模拟滤波器容易实现,而且数字滤波器具有灵活性、精度高、可靠性高等优点。数字滤波虽然种类繁多,但有些滤波效果很好而算法复杂,不适合用于实时性要求很高的伺服系统中。所以,本系统采用应用比较广泛、效果良好且易于工程实现的巴特沃斯滤波器。巴特沃斯低通滤波器的幅值响应在通带内具有最平坦的特性,且在通带和阻带内的幅频特性是单调变化的。图3为二阶巴特沃斯低通滤波器的幅频特性,经双线性变化后的Z函数为:

1.3 核心控制技术和方法
速度控制器和位置控制器均采用超前滞后校正,经测试电机(带负载)的传递函数为:

其中,s为复变参量,称为复频率。加入速度调节器后的速度回路开环传递函数为:

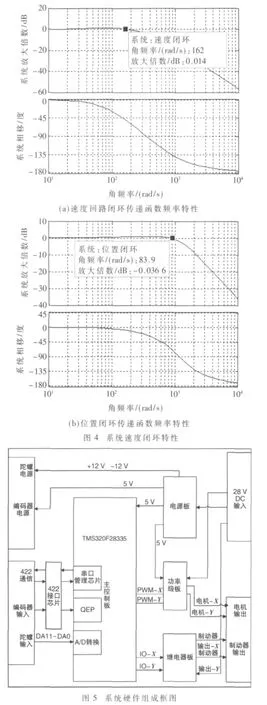
速度闭环特性如图4(a)所示。由图可知速度回路的闭环带宽为 162 rad/s(即 25.80 Hz,实测 33.5 Hz)。 则伺服控制系统的位置开环传递函数为:

位置闭环特性如图4(b)所示。由图可知位置回路的闭环带宽为 84 rad/s(即 13.4 Hz)[5]。
2 系统硬件实现
两轴稳定平台的硬件组成框图如5所示,包括数字信号处理器、可编程逻辑器件、串口接口芯片、陀螺、A/D转换芯片、光栅编码器、制动器和功率级等。
2.1 信号处理模块
本系统采用TMS320F28335为主控制器,该DSP由TI公司最新推出,具有浮点运算能力,其工作主频为150 MHz,具有 34 KB的内部 RAM、256 KB的内部 Flash、2个32 bit的光栅采集计数器,可以满足两轴稳定平台的数据采集和算法实现。

2.2 数据采集模块
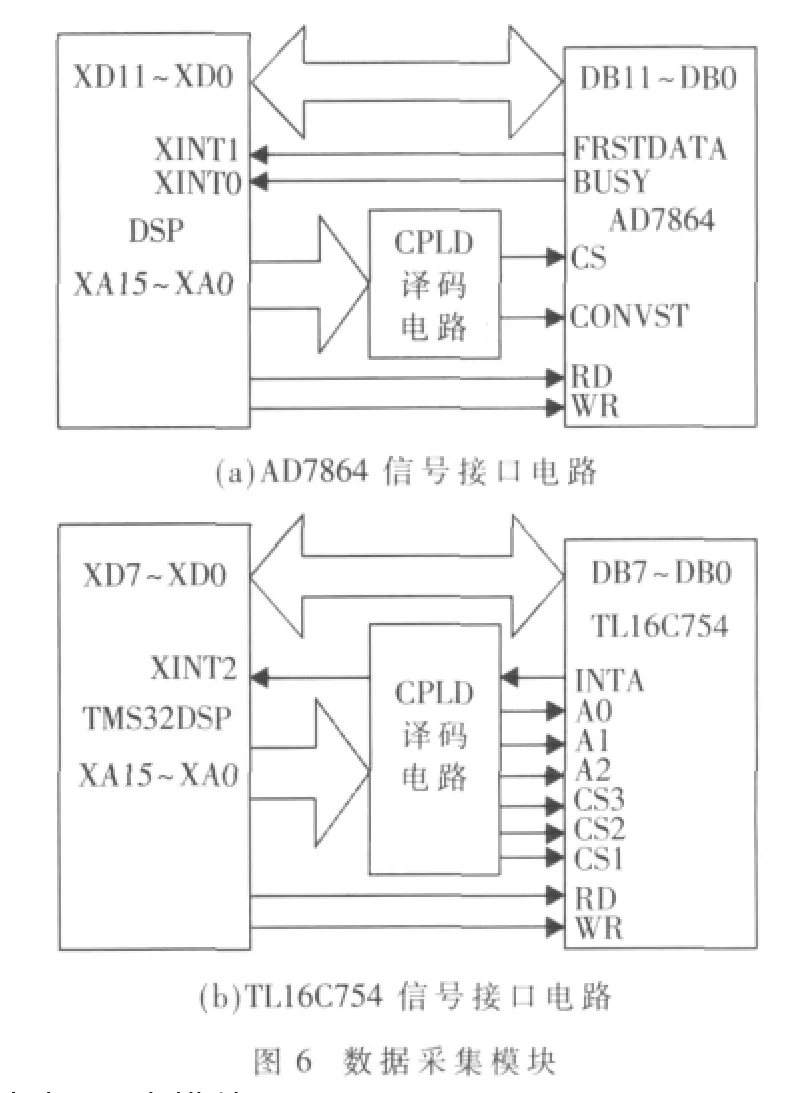
两轴稳定平台控制系统需要完成两路光栅编码器值和两路陀螺值的采集,并实现与上位机的通信。编码器值的采集是由 TMS320F28335(DSP)自带的外设 QEP来完成,该模块具有32 bit计数器和滤波功能,编码正交信号和零位信号通过RS-422接口芯片与DSP相连;陀螺值的采集是通过外扩A/D采样芯片AD7864来实现。AD7864转换精度为12 bit,输入电压为-5 V~+5 V,四通道同时工作时最大速率为 130 KS/s,AD7864与DSP外部接口(XINTF)如图6(a)所示。
与上位机的通信是通过外扩的串口接口芯片TL16C754B实现的。该芯片通信速率高达2 Mb/s,收发各有64 B的FIFO,四通道。本系统中设置FIFO满中断为56,使能接收使能超时中断,上位机每包数据为22 B,经验证通信正常。TL16C754与DSP外部接口(XINTF)如图 6(b)所示。
2.3 电机驱动模块
功率级电路板上采用TI公司生产的高性能电机驱动芯片DRV8332。该芯片最高供电电压可达70 V,最高运行频率为500 kHz。此外,还有过载、低压、短路和过热可编程的电流保护功能。
3 控制算法的实现
速度控制器和位置控制器均采用超前滞后校正,如下:

采用双线性变换法将模拟控制器离散化,将式(7)代入 式(6)得 式(8):

用并行程序设计实现算法,离散后的Z传递函数如下式:

4 实验结果
把稳定平台安装在摇摆台上,模拟飞机飞行姿态变化对平台造成的扰动,以验证稳定平台的稳定精度,实验结果如下。
4.1 模拟在拍摄状态下的前向像移补偿
模拟上位机发送的飞行参数是:地速为1 000/(km/h),飞行高度为12 km。由陀螺码值计算公式ref_speed=AC_SPEED×1.0/AC_ALTITUDE×0.325 97和参考角速度计算公式(1)可得:参考角速度为 1.318°/s,陀螺参考码值为27,陀螺分辨率为0.048 8°。得到上位机的拍摄命令后,记录俯仰轴陀螺码值如图7所示,速度稳定度≤0.3°/s,满足系统要求。
4.2 模拟等待状态下稳定平台的稳定性
在上位机发送拍摄命令之前,稳定平台处在等待状态,稳定系统把上位机发送的飞行参数(载机俯仰角和横滚角)进行换算后作为位置环的参考输入,编码器值作为位置闭环的反馈输入,保持相机垂直地面。模拟结果:最大角速度为 4.5°/s、位置范围为±3°的位置正弦跟踪如图8所示,每个编码器码值为 0.011°,误差计算为0.22°,小于指向精度指标(≤0.55°),满足系统要求。
本文详细介绍了以TMS320F28335为主控制器的航空相机稳定平台系统的硬件设计及其算法。通过摇摆台测试可知,前向像移补偿精度和垂直定位精度均满足指标要求。
[1]卢筑飞,胡志刚.基于P89V51的两轴稳定平台控制器设计[J].计算机测量与控制,2008,16(12):1863-1864.
[2]黄埔,葛文奇,李友一,等.航空相机前向像移补偿的线性自抗扰控制[J].光学精密工程,2011,19(4):812-819.
[3]George Ellis.Control systems guide(third edition)[M].北京:电子工业出版社,2006.
[4]王德江,匡海鹏,蔡希昌,等.TDI-CCD全景航空相机前向像移补偿的数字实现方法[J].光学精密工程,2008,16(12):2045-2052.
[5]黄昌霞,李奇,姬伟,等.高精度稳定平台伺服控制系统设计与实现[J].航空兵器,2011(1):23-27.
