基于3电平整流器的永磁同步电机侧的研究
2012-07-02丁佐进屈克庆邢月红牛清泉
丁佐进,屈克庆,邢月红,牛清泉
(上海电力学院电力与自动化工程学院,上海 200090)
变速恒频风力发电技术是目前应用较为广泛的风力发电技术,能够适应很大的风速变化范围,有效地利用风能[1].目前投入使用的变速恒频风力发电机组大多是双馈风力发电机组,不能适应对转子转速的要求,在使用齿轮变速箱进行调速的过程中,增大了机械损耗,降低了能量转换效率和运行的可靠性;此外,因其增加了变速箱部件也会提高运行维护的费用.永磁同步风力发电系统可以避免双馈风力发电机组的上述缺点,除了稳定性高、噪音低外,更是具备有功和无功功率可调的优点,克服了双馈电机无功功率不足的缺陷[2].在大力发展风电的今天,风力发电机组单机容量在不断增加,对风力机组的可靠性和效率的要求也不断提高.随着发电控制设备发电成本的降低和风力发电技术的进步,大功率同步风力发电系统有着更广阔的应用前景[3].3电平变换控制技术对大功率永磁同步风力发电机的转速控制及风力发电系统的并网提供了支持,已成为现阶段风力发电的研究热点.
与传统两电平电路相比,3电平逆变电路开关器件承受较小的开关应力,能够提高逆变器的传输功率,具有更低的电流谐波畸变率.与SPWM和方波控制相比,空间矢量PWM控制具有电压利用率高、动态响应快等特点,避免滞环电流PWM控制因开关频率不固定而产生谐波的不利因素[4].
3电平空间矢量(Space Vector Pulse Wind Modulation,SVPWM)控制的传输功率高、谐波畸变率低、电压利用率高,将其应用于大功率永磁同步风力发电机整流侧控制系统,使其具有动态响应快速、稳态精度较好,以及电流总谐波畸变含量较低等优势,以达到良好的控制效果[5].
1 3电平变换器的拓扑结构选择
1.1 电路拓扑分析
目前风力发电系统通常采用不控整流电路或2电平PWM整流电路,导致交流侧电压电流波形较差,功率因数不高,尤其对于交流侧发电机的正常稳定运行极为不利.因此,在整流电路中采用二极管箝位式3电平可控整流电路[6].在该3电平拓扑结构中,开关器件承受电压仅为2电平拓扑结构时电压的1/2,滤波电感损耗比2电平的小,这种形式可以克服传统2电平变流器交流侧波形畸变率高的缺点,还可以在采用同样耐压等级开关器件的情况下提高变流器的电压等级,达到变流器高压大功率传输的目的.因此,在AC/DC转换电路中采用3电平可控整流电路,并运用3电平空间矢量(SVPWM)双闭环控制策略来控制发电机的转速和直流母线电压,可使风力发电机稳定地运行,同时也为后续DC/AC逆变并网提供有利的条件.
图1为二极管箝位式3电平可控整流系统.在此3电平电路拓扑中,每相4个功率开关管的状态组合形成3种工作模式.
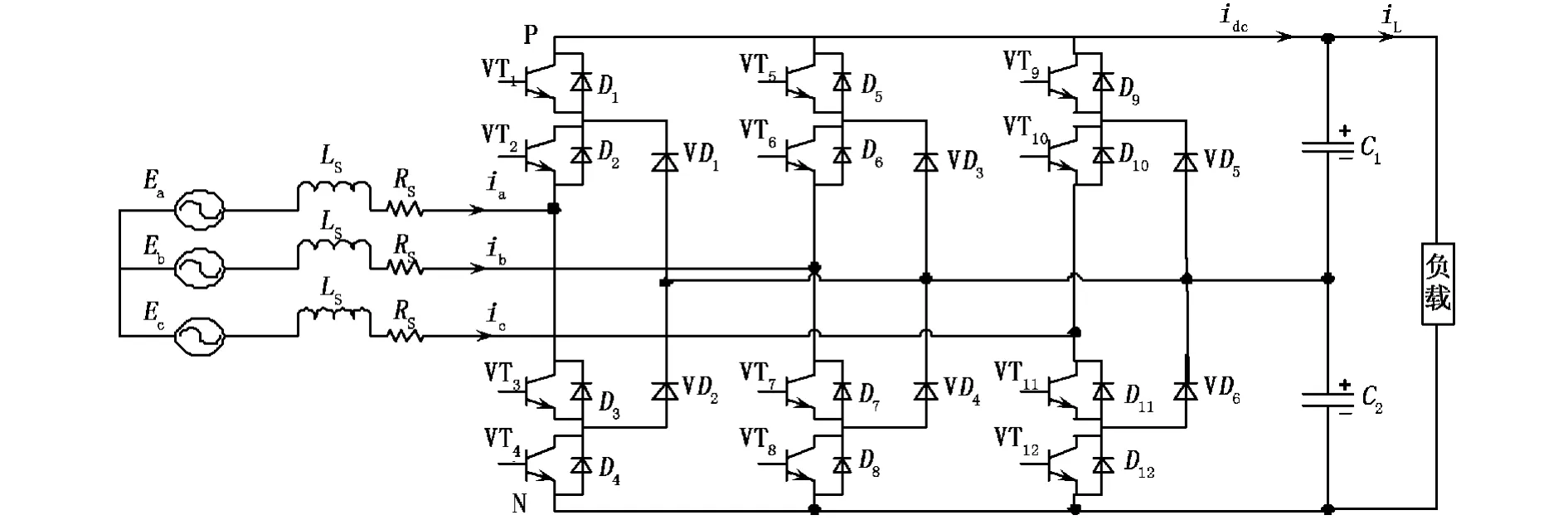
图1 二极管中点箝位3电平SVPWM整流电路拓扑
以图1中的A相为例,当VT1和VT2开关管导通、VT3和VT4开关管关断时,A相电压为Ud/2,称其工作状态为P;当VT2和VT3开关管导通、VT1和VT4开关管关断时,A相电压为零,称其工作状态为O;当VT3和 VT4开关管导通、VT1和VT2开关管关断时,A相电压为-Ud/2,称其工作状态为N.
1.2 3电平SVPWM触发脉冲
SVPWM算法实质上就是通过控制整流器不同的开关模式,使整流器瞬时输出的三相脉冲电压构成的电压空间矢量与所期望输出的三相对称正弦波电压构成的电压空间矢量相等.
1.2.1 3电平电压矢量图的划分
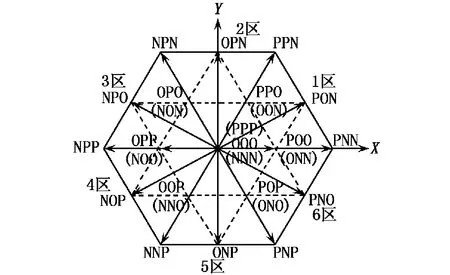
图2 3电平空间电压矢量示意
3电平输出电压矢量特性的六角形空间电压矢量图如图2所示.义为大矢量,如PNN和PPN;幅值为的矢量定义为中矢量,如PON;幅值为Ed/3的矢量定义为小矢量,如PPO和ONN.根据空间矢量的角度θ来判断扇区,θ的范围为[0,2π],因此用 θ/60再取整的方法来判断参考矢量的扇区及区域.其扇区划分如图2所示,小区域划分如图3所示.
1.2.2 电压矢量作用时间计算
落在每个扇区区域内的Uref矢量可由临近的矢量合成.假设临近期望矢量为矢量U1,U2,U3,则空间矢量合成的伏秒平衡原则为:
三相对称电压可以定义成定子空间电压矢量Uref,即:

式中:a=ej2π/3;
Ua,Ub,Uc——参考电压.
式(1)通过坐标变换,在α-β坐标系中表示为:

式中:Uα——Uref的实部;
Uβ——Uref的虚部;
|Uref|——幅值;
θ——相角.
3电平整流电路每相有P,O,N 3个工作状态,整个电路有A,B,C 3相,每个工作状态都对应一个基本电压矢量,因此3电平整流电路有27个基本电压矢量.一般将幅值为2Ed/3的矢量定

式中:T1,T2,T3——矢量 U1,U2,U3的作用时间;
TS——空间矢量调制的控制周期.
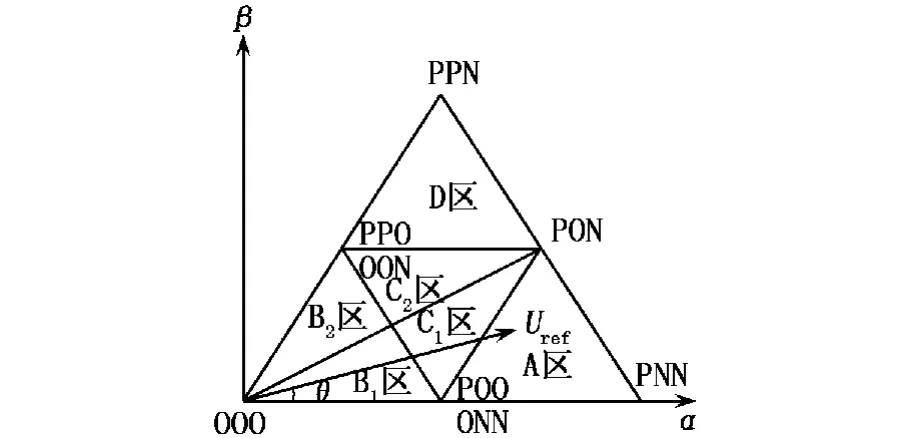
图3 第一扇区小区域空间电压矢量示意
本文以第一扇区A区为例,计算在第一扇区内各区域各矢量对应的作用时间[7].
由图3可知,落在A区的Uref由PNN,PON,POO 3个矢量合成.PNN矢量模长为2Ed/3,PON矢量模长为/3,POO 矢量模长为 Ed/3,Uref矢量模长为
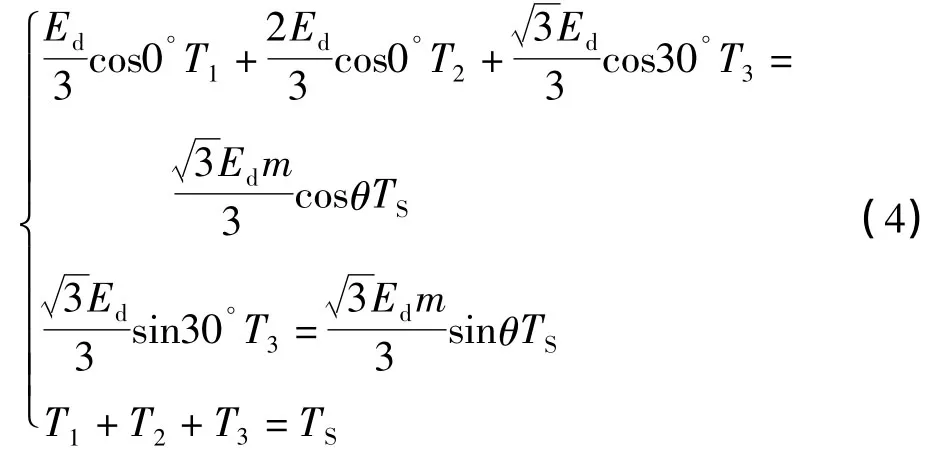
式中:m——空间矢量SVPWM调制深度,其定义为Uref与能够线性调制的最大电压之比.
由式(4)可得:
SVPWM的线性调制区位于图2中的内切圆,线性调制时能够输出的最大电压矢量幅值为因此其脉冲调制深度为:
同理也可求得其他扇区的小区域各矢量的作用时间.
每一矢量状态转化到另一矢量状态时,只有其中一相状态发生变化,例如POO→PPO时,只有B相状态发生变化.这样,同类型小矢量之间的相互转换可以减少开关器件的工作次数,也能减少综合畸变率,这对整流变换器工作十分有利.
2 3电平永磁同步电机整流侧控制算法
2.1 永磁同步电机控制数学模型
图1为二极管中点箝位3电平整流器主电路,永磁同步发电机机端电压电流是三相对称的.
通过坐标变换后在d-q同步旋转坐标系下建立的数学模型[8,9]为:
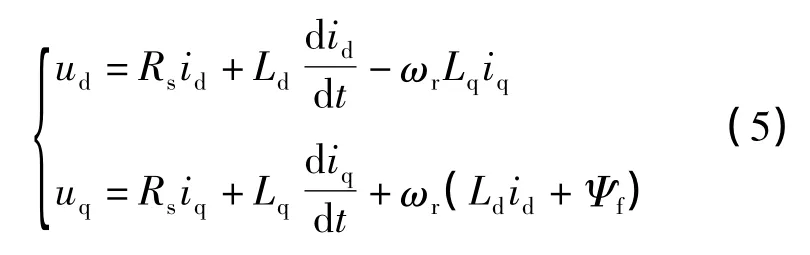
式中:id,iq——发电机的d轴和q轴电流;
Ld,Lq——发电机的d轴和q轴电感;
Rs——定子电阻;
ωr——电角频率,ωr=pωg(p为发电机转子的极对数);
Ψf——永磁体的磁链;
ud,uq——us的 d 轴和 q 轴分量.
定义q轴分量电势 eq=ωrΨf,d轴分量电势ed=0.
由式(5)得出的d轴和q轴等效电路如图4和图5所示.
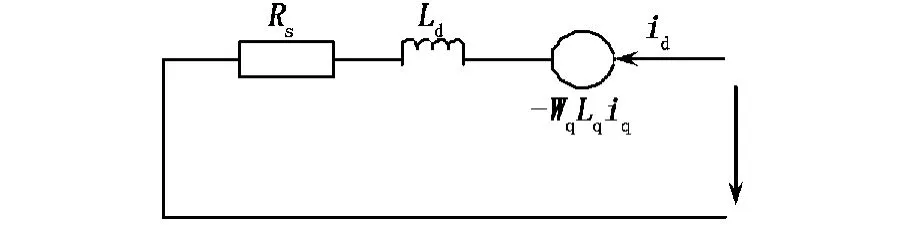
图4 d轴等效电路
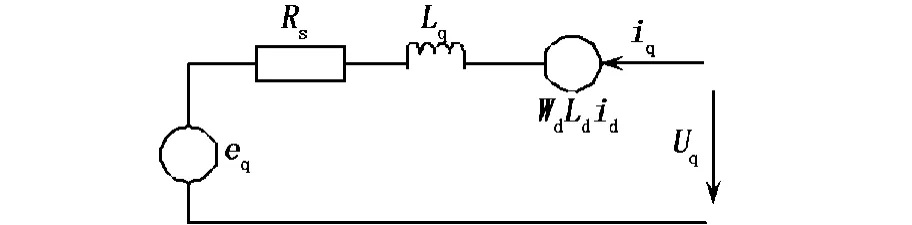
图5 q轴等效电路
永磁同步电机在d-q-0坐标系上的电磁转矩方程[10]为:

式中:Te——永磁同步发电机的电磁转矩;

式中:Tm——风力机的机械转矩;
J——发电机的转动惯量;
ωg——发电机的机械角速度(由于是直驱,
故与风力机的机械角速度相等).
2.2 3电平整流器的控制算法
在直驱型风力发电系统3电平整流器侧采用可控的PWM调制方法,可有效减小交流侧电压和电流的谐波,任意调节交流侧功率因数,同时实现功率的双向流动[11].
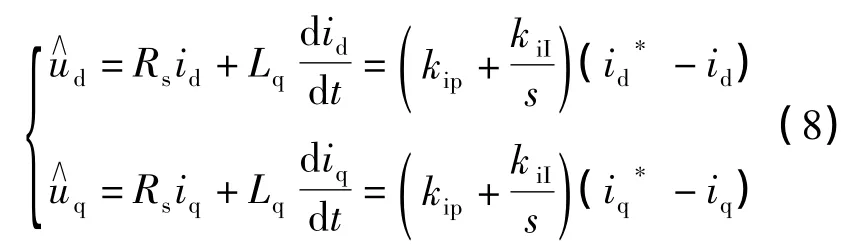
根据式(7)可知,系统转速ω与电磁转矩Te相关,因此可以通过控制转速ω获得q轴电流的参考值iq*.由式(5)可知,Ud和Uq之间存在耦合项和ωrLqid,可以将电阻和电感产生的反电势项看作干扰项,通过前馈补偿的方法消除Ud和Uq间的耦合,其方程为:
np——永磁同步发电机的极对数.
将风机与永磁同步发电机作为一个系统,则其转子运动方程为:
式中:kip,kiI——干扰项和相应比例积分系数;
s——拉普拉斯因子.
解耦后的干扰项,通过比例积分PI调节器控制,对其干扰修正补偿,从而形成电流和转速双环控制.由此就可以得出双闭环控制策略框图,并在此基础上,加入坐标变换环节即可构成完整的控制系统.
永磁同步发电机电机侧控制如图6所示.整个控制系统采用电压和电流双闭环控制,在3电平整流器中采用跟踪指令电压矢量的SVPWM电流控制方法.
永磁同步风力发电机组电机侧的控制过程为:测量发电机电角度 θ;测量定子电流 ia,ib,ic,利用A-B-C坐标系到d-q-0坐标系的变换得到id,iq.
通过最佳叶尖速比获得最佳转速ω*(本文在仿真时手动设定ω*),ω*与实测转速ω的比较值经过PI调节器得到参考电流iq*,然后与实际电流iq相比较,再经过PI调节器和电压补偿环节(ωr(Lqiq+Ψf))得到参考电压Uq.同时设定d轴电流参考值id*=0,与实际电流id相比较的值经过PI调节器和电压补偿环节(ωrLqiq)就可以得到参考电压Ud.Ud和Uq经过d-q-0坐标系和α-β-0坐标系的变换得到参考电压 Uα和 Uβ,这样便可以利用空间矢量脉宽调制(SVPWM)的方法产生PWM波形,以实现对整流侧的控制.
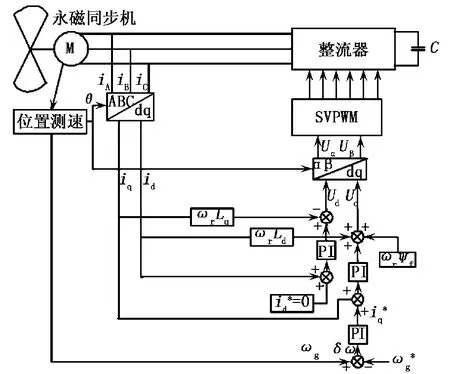
图6 永磁同步发电机电机侧控制示意
3 仿真研究
本文利用Matlab/Simulink软件平台建立了永磁同步风机发电系统及其三相电压型PWM整流仿真模型,如图7所示.对3电平永磁同步电机矢量控制进行了仿真研究,将三相静止坐标系中的电流变换到空间旋转同步坐标系中,则通过前馈补偿解耦成两相电流系统,将参考电压矢量从d-q坐标系变换为α-β坐标系,再经过SVPWM脉冲产生模块输出驱动波形.
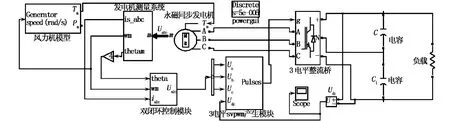
图7 三相电压型PWM整流器仿真模型
本文对永磁同步电机的参数设定如下:定子电阻为 2.875 Ω,直轴电感为 8.5 mH,交轴电感为8.5 mH,转动惯量为 0.000 8 kg·m2,极对数为4,摩擦系数为0.给定风力机的风速为9 m/s.发动机转速ω*设定为200 r/s,用以观察永磁同步风力发电系统直流侧负载电压.图8为该直流侧负载母线电压.
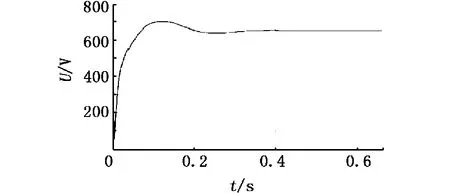
图8 直流侧负载母线电压
由图8可以看出,发电机发出的三相电压经过整流后能够输出相对平稳的直流电压.风力机获得风速后,会产生机械转矩Tm,带动发电机的转速快速上升,发出三相交流电,使得直流母线电压也快速升高.通过所测得的定子电流在旋转坐标下的q轴分量iq,对外环转速进行控制,使得发电机转速恒为200 r/s,此时风力机获得此转速下的输出转矩,使同步发电机发出稳定的交流电,进而达到控制直流母线电压平稳恒定的目的.
4 结语
本文分析了永磁同步电机的数学模型,简述了空间电压矢量的SVPWM脉冲产生原理,搭建了直驱式永磁风力发电系统机侧整流器的控制框图,并进行了仿真研究.仿真结果表明,电流转速双闭环控制系统具有可行性,可以有效保持直流母线电压的稳定,具有动态响应性能好、抗干扰能力强等优点,具有很强的实用性.
[1]刘万琨,张志英,李银风,等.风能与风力发电技术[M].北京:化学工业出版社,2008:89-93.
[2]惠晶.新能源转换与控制技术[M].北京:机械工业出版社,2008:190-219.
[3]丁荣军,黄济荣.大功率变流技术与应用(四)[J].变流技术电力牵引,2008(6):34-38.
[4]林渭勋.现代电力电子技术[M].北京:机械工业出版社,2005:454-457.
[5]屈克庆,丁佐进,邢月红.基于永磁同步风力发电机并网系统的低电压穿越方法[J].华东电力,2011,39(6):2 033-2 036.
[6]金红元,邹云屏,林磊.三电平PWM整流器双环控制技术及中点电压平衡控制技术的研究[J].中国电机工程学报,2006,26(20):64-68.
[7]宋文祥,陈国呈.三电平中点钳位式逆变器SVPWM方法的研究[J].电工电能新技术,2004,23(4):30-33.
[8]陈伯时.电力拖动自动控制系统[M].第2版.北京:机械工业出版社,1997:123-154.
[9]EDUARD Muljadi,BUTTERFIELD C P,WAN Yih-huie.Axial flux modular permanent magnet generator with a toroidal winding for wind turbine applications[J].IEEE Trans.on Industry Application,1999,35(4):831-836.
[10]王成元,夏加宽.现代电机控制技术[M].北京:机械工业出版社,2008:103-135.
[11]吴迪,张建文.变速直驱永磁风力发电机控制系统的研究[J].大电机技术,2006(6):51-55.
