高压大功率三电平逆变器主电路改进与脉宽调制安全稳定关键技术
2012-07-02尹项根王存平
刘 健 尹项根 张 哲 熊 卿 王存平 张 斌
(华中科技大学电力安全与高效湖北省重点实验室 武汉 430074)
1 引言
近年,智能电网[1]、微电网[2]概念不断提出;新能源、分布式电源技术快速发展[3];电气节能、电能质量控制装置广泛采用[4,5],这些系统在与电网接口或者负载驱动方面很多都要求是基于电力电子的大(中)功率装置。我国在众多电力电子变换装置中,为了提高输出容量和电压等级,均广泛采用了两电平H桥功率单元串联结构,从4重化ASVG装置,到7重化高压异步电机驱动装置,直至10重化STATCOM系统,两电平功率单元串联技术在近10年间被发挥到了极致。但是,纵观电力电子技术的发展,应用对象的电压等级越来越高,从几千伏到几万伏甚至更高;容量越来越大,从几千瓦到几十兆瓦不等。如果继续按照传统方式,需要十几重(甚至更多)两电平级联才能达到要求,势必带来系统复杂程度过高、整体安全稳定性下降、装置成本增加以及后期维护困难等一系列问题,其弊端逐渐超过了原有优势。因此,针对高压大功率电力电子变换系统,需要采用新的拓扑结构,结合新的理论技术,对主电路及其控制技术进行完善和创新。
三电平逆变电路直流母线电压由多个开关器件共同承担,输出电压高,du/dt变化率小,已成为实现高压大功率变换的一种优良拓扑。我国很多高校、科研院所和部分企业已经进行了探索性的研究,并取得了一些有益成果,但从发表论文以及应用现状来看,在部分理论和技术方面仍然存在一些不足。本文以高压大功率三电平逆变器为分析对象,对已经出现并急需解决,或初见端倪有待深入研究的关键技术问题进行论述,主要包括以下两个方面:
(1)主电路拓扑。受功率二极管反向恢复过程影响,局部电路存在电流过大问题,限制了系统输出容量的提高,新的主电路结构有待提出。
(2)脉宽调制技术。由于高压大功率场合系统承担任务重大,过电压、过电流裕度值较低,且脉宽输出信号复杂,对脉冲信号安全稳定性(包括故障识别和容错处理)进行系统性研究十分必要。
本文密切结合实际,对以上两点关键问题的提出与解决方案进行研究,并给出试验分析。
2 主电路拓扑改进关键技术
三电平主电路拓扑改进,其核心内容是提高输出电压等级和输出容量。对于前者,在目前器件耐压水平下三电平结构需要采用开关器件串联、双三电平协同工作或者多重化才能达到更高电压等级的输出,其关键技术在文献[6-8]中得到了解决;对于后者,主要是通过选取容量更大的开关器件来实现。而如何通过提高器件利用率,达到提升系统输出容量的研究开展得并不多。
2.1 传统三电平逆变电路局部过电流问题的发现
经研究发现,在传统三电平逆变电路的开关过程中,存在抑制电路二极管VDc和钳位电路二极管VDA5同时进入反向截止恢复状态,这使得逆变器在开关切换过程中会出现局部电路电流过大问题(简称局部过电流),该问题限制了系统输出容量的提高。本文将先以逆变器A、B两相桥臂为例,对局部过电流问题产生原因进行分析。
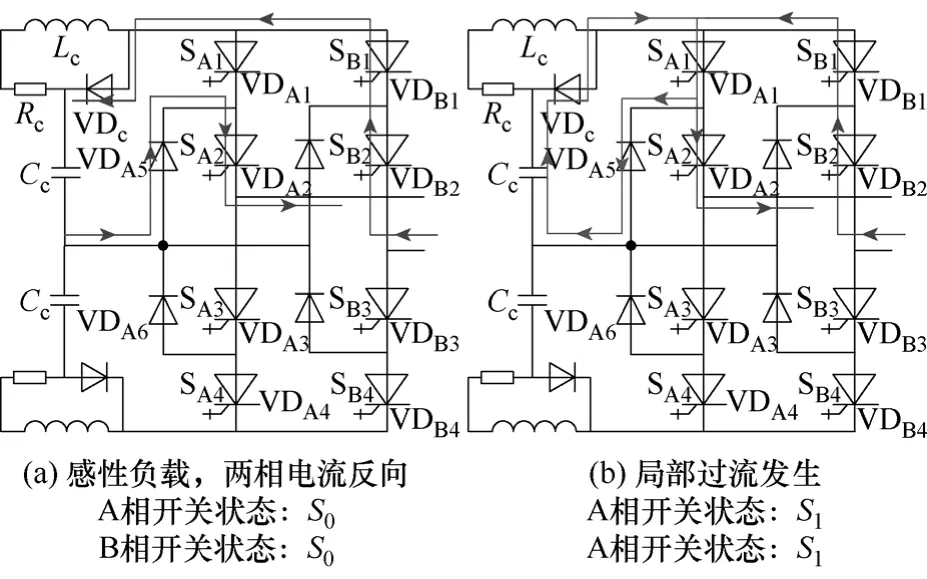
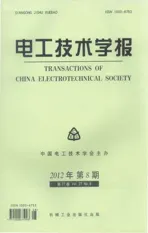
图1 局部过电流现象分析Fig.1 Partial over-current process analysis
图1所示为传统三电平逆变电路A、B两相桥臂,假设负载为感性。图 1中开关状态“S0”表示电路输出零电平状态,“S1”表示电路输出高电平状态。当 A、B两相输出电压均为正时(如相位在2/3π~π),根据三相感性交流系统特性,可知存在A相电流为正,B相电流为负的区域。此时,分两步来分析。
Step1:A相进入“S0”状态,B相保持“S1”状态。
在图1a中,A相电流由中性点流出,B相电流经过续流二极管VDB1、VDB2以及di/dt续流二极管VDC,流入直流母线。按照脉宽调制规则,此后 A相开关状态将会由“S0”转变到“S1”。
Step2:A相处于“S1”状态,B相处于“S1”状态。
如图1b所示,此时,A相开关器件SA1开通,使得 di/dt抑制回路二极管 VDc和钳位电路二极管VDA5同时进入反向截止过程,形成图 1b中 SA1、VDA5、Cc、VDc区域所示的局部环流电路。
根据电路理论,该回路中电流变化率为

式中,Udc为直流母线电压;L为线路杂散电感;Δt为反向恢复时间。
图2所示为 ABB公司大功率快恢复二极管5SDF02D6004反向截止过程中的波形,根据图 2b的关系曲线可以近似得到

式中,Irr为二极管反向恢复电流峰值。
图1b局部环境区域中流过SA1的电流为

式中,ISA1为通过SA1的电流;Iload为负载电流。

图2 二极管截止过程中的反向恢复波形Fig.2 Current and voltage waveforms of power diode during reverse recovery time
由于图1b局部环境区域电路中IGCT通态电感值以及线路杂散电感值都非常小(一般为十几纳亨),加上Δt时间非常短暂(一般为几微秒),因此式(1)中电流变化率 di/dt数值可达到每微秒数百安,甚至更高。由式(2)可知,Irr将会成比例上升,开关器件 SA1上的电流 ISA1也将达到一个很高的数值,局部过电流问题由此而产生。
针对该问题,文献[8]从脉宽调制方面提出了解决办法,即根据逆变器电流输出方向对 SA2进行附加控制,使其提前断开,从而避免 VDc和 VDA5同时进入反向截止状态。但在大功率场合,逆变器输出电流波动大且谐波含量高,因此难以准确判断输出电流方向。此外,逆变电路中有多个器件需要附加控制,对系统输出波形质量以及安全稳定性均会带来负面影响。本文研究发现,对传统三电平逆变器主电路进行改进,可有效消除局部过电流问题,下面对其结构进行详细说明。
2.2 基于分相独立di/dt抑制电路的新型拓扑
图3所示为改进后的三电平逆变电路(图中仅给出三相正半桥臂电路,负半桥臂结构相似),与传统三电平逆变电路相比,其差别在于对逆变桥臂的di/dt抑制环节进行了分相独立设计,并且将 di/dt抑制电路的能量泄放电阻Rcl优化成三相公共使用,在主电路改动最小的基础上解决了局部过电流问题。下面对改进后的情况进行详细分析。
此时,继续结合图1中的开关过程对图3的电路进行分析。
Step1:A相处于“S0”状态,B相处于“S1”状态。
此时,A相电流由中性点流出,但是B相电流经过VDB1、VDB2后,不再通过VDc1二极管流入直流母线,而是改由B相的独立di/dt抑制电路的VDC2流入F点,并给直流钳位电容充电。

图3 基于分相独立di/dt环节的新型三电平逆变电路Fig.3 New NPC circuit based on phase independent di/dt link
Step2:A相进入“S1”状态,B相保持“S1”状态。
此时,B相电流保持不变,A相 SA1导通后,电流由原来的直流母线中性点流出,转为由直流正母线 E点经过 A相 di/dt抑制电路电感 Lc1、SA1和SA2流出,而该过程中 di/dt抑制电路二极管 VDc1一直处于截止状态,虽然这时钳位二极管 VDA5进入反向截止过程,但是由于 LC1的存在(一般为几十个微亨),因此流过 VDA5上的 di/dt得到有效抑制,其反向截止电流将得到有效降低,根据式(3)可以计算出,SA1上的电流也随之降低。至此,局部过电流问题得到了解决,该新型电路为提高三电平逆变器的输出功率奠定了基础。
3 脉宽调制安全稳定关键技术
目前脉宽调制研究主要集中在理论算法[9,10]和实现技术[8,11,12]方面,对提高脉宽调制安全稳定性方面的研究较少。而在高压大功率场合,脉宽调制的安全稳定性逐渐成为研究工作的重点,贯穿至高压大功率三电平逆变器起动、正常运行以及停止整个过程,本文将分别对以上三个阶段的安全稳定关键问题进行理论研究并提出解决方法。
3.1 逆变器起动瞬间的安全接入
国内外大功率变换器在投运起动过程中,都发生过异常停机和器件损坏的事故,因此,起动瞬间的安全接入技术必须加以充分考虑:除了脉宽的正确性外,保证系统最小脉宽、减小起动瞬间 du/dt数值是两个关键问题。
图4所示即为三电平逆变器三相脉竞输出电压波形示意图(逆变器出口端,未经过输出滤波器)。如果逆变器在“t1”或“t2”时刻接入,会分别出现最小脉宽时间不够以及 du/dt数值过大现象,会对功率器件和系统造成不利影响。下面结合图4对以上两个问题做进一步分析。
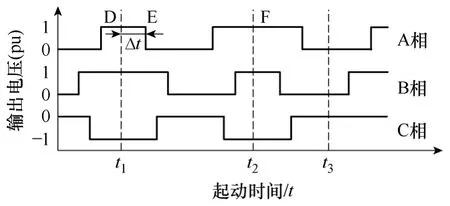
图4 起动瞬间脉宽输出波形分析图Fig.4 PWM waveform analysis at starting instant
(1)保证系统最小脉宽
大功率场合最小脉宽时间 tp一般为几十个纳秒,但由于逆变器起动瞬间的随机性,一旦起动时间上出现在图4中t1时刻,会出现脉宽小于设置值的情况。例如在图4中t1时刻,此时A相桥臂在D点输出高电平,经过Δt时间后在E点输出零电平,由于 t1时刻的随机性,存在Δt<tp的可能,导致系统最小脉宽时间不能满足器件设计要求,会造成大功率器件导通、分断失效,从而导致起动瞬间输出电压波形畸变、稳态转矩波动以及电流大幅振荡等问题的出现,给系统的安全稳定运行造成负面影响。文献[13]也对该问题进行了分析,并得到了一些有益的结论。
(2)减小起动瞬间系统du/dt数值
如果逆变器在图4所示的“t2”时刻投入,A、B两相输出高电平,C相输出低电平,这时候逆变器AC、BC相输出电压瞬间由零变为UDC(直流母线电压),电压变化率达到最大值,会对功率器件以及输出滤波电路元件造成过电流冲击。
发现以上问题后,本文采用零电平过渡技术实现起动瞬间脉宽信号的安全接入,该方法的基本特征是,在起动信号发生后,首先对当前脉宽状态进行识别,在零电平开关状态到来后,再将脉宽信号使能输出,该方法能够很好的解决以上问题。
3.2 逆变器运行过程中脉宽信号安全稳定
现代电力电子技术要求逆变器输出电气量幅值、相位和频率随时变化,脉宽信号的输出也随之呈现跳跃式变化,为提高脉宽输出的安全稳定性。需要结合开关信号所属区间进行相应的处理,并对故障信号进行快速识别与闭锁。下面结合图5对以上两方面问题做进一步分析。
3.2.1 开关区间过渡处理
图5为多载波PWM调制开关区间和开关组合分析图。图中T1~T3为三个连续的开关区间,“S1”表示输出正电平状态,“S0”表示输出零电平状态,“S-1”表示输出负电平状态。“Sd+”表示正死区状态,“Sd-”表示负死区状态。

图5 开关区间和开关组合分析图Fig.5 Switching combination and transition area
(1)T1~T2过渡区间分析。在 T1~T2区间载波UC与调制波UM的交点数值小于零,其过渡过程SA1、SA3按照三电平调制波UM<0状态时的要求输出;SA2与SA4按照双边对称死区原理在图5中所示的理想开关位置A、B点,进行提前关断和延时开通。
(2)T2~T3过渡区间分析。该过渡区间,需对三电平脉宽输出添加额外约束和附加条件才能保证脉宽输出安全稳定。在T2~T3过渡区间由于调制波UM和载波UC斜率由负变正,按照三电平脉宽调制原理SA1需由零瞬变为1,SA3需由1瞬变为零,此时需要增加额外的死区,以避免逆变桥臂直通,又由于T3区间并不方便实时预测,因此,只有根据对T2~T3过渡区间的确认,之后再对 SA1信号实行加入单边死区的措施。类似的开关区间过渡还会发生在系统超调制发生与返回时刻,下表总结了A相桥臂各器件所需的死区约束,并且将作为三电平脉宽调制中的开关判据,以此提高系统安全稳定性。

表 A相桥臂所有死区约束Tab. Dead-time constraint of phase A
3.2.2 故障信号极快速识别与安全闭锁
即使有一套稳定、健壮的脉宽输出理论与方法,系统在运行过程中也会出现电压不稳定、程序复位及信号线瞬间粘连等各种无法预期的问题,为最大限度提高脉宽输出的安全与稳定性,还需要建立一套完善的故障信号识别以及安全闭锁机制。

图6 故障信号识别与安全闭锁Fig.6 Fault signal recognition and safe blocking
该问题是一项系统性的工作,对功率器件驱动、脉宽信号发生以及高速检测技术几个方面均提出了新的要求,面对这些问题,本文采用了图6中A、B、C三点的故障识别和安全闭锁机制,其特点如下:
A点功率器件驱动电路能够对脉宽小于Tfault的故障、干扰、错误脉宽信号加以滤除。
B点要求系统能够对脉宽信号能够进行快速检测(约几十纳秒),并且对脉宽信号的状态进行快速、实时的判断。当检查到故障信号时,在Tfault时间内向驱动系统发出闭锁信号。
C点故障检测闭锁还要求识别系统与顶层控制算法和脉宽输出之间有信息的双向交互,以便提高故障识别性能,并对闭锁原因进行记录。
3.3 逆变器紧急停止时刻脉宽信号特殊处理
逆变器紧急停机,分为两种情况:一种是在正常情况,另外一种是在故障状况。在正常状况下,如果逆变器输出接旋转负载,简单的直接闭锁脉宽,会产生反供电,导致过电压、过电流冲击等问题产生。如果是在故障状态下,情况将会更加复杂,不当的急停方式,可能会使得故障进一步扩大。由于该问题涉及的理论研究内容较多,鉴于研究工作和篇幅限制,本文在此仅对逆变器驱动 6kV、380kW 异步电动机在不同负载情况下的急停瞬态过程进行定量分析,为后续研究提供理论分析的数据基础。
4 试验结果分析
图7所示为新型三电平逆变电路di/dt环节的电流波形分析,由于高压条件下直流环节电气量的测量难道大,加之文中所述局部过电流出现时间非常短暂(纳秒级),因此本文测试条件为:电压等级为100V,阻感负载参数分别为 4.8Ω和 31.5μH,死区时间为 30μs。
图7 di/dt电路试验波形Fig.7 The analysis of di/dt circuit
如图 7所示,A相桥臂开关器件 SA1在 A点开通,流过 SA1的电流在 B点达到前期峰值,但该值依然小于负载电流,经过一段时间后,在 C点稳定至负载电流。从波形结果看,流过 SA1的电流得到了有效控制,避免了局部过电流问题出现,验证了本文提出的分相独立di/dt抑制电路的有效性。
图8为6kV、380kW异步电动机3Hz时的起动电压、电流实测波形比较,图8a为无安全稳定措施时的起动波形,图8b为对应频率下采用了安全稳定措施后的起动波形。从图8可以看出采用安全稳定措施后,均有效降低了系统起动电流峰值以及尖峰过电压逆变器的安全稳定性能得到提高。
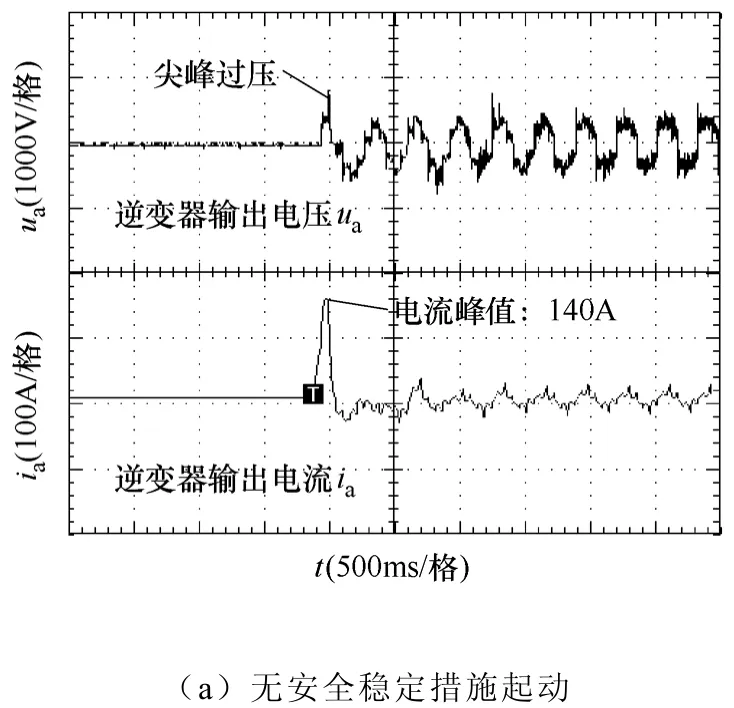

图8 6kV、380kW异步电动机起动电压电流波形比较Fig.8 Starting voltage and current waveforms of 6kV 380kW asynchronous motor
图9所示为逆变器驱动6kV、380kW异步电动机在 35Hz频率下的电压与电流波形(开关频率为800Hz),35Hz时电压总谐波含量为3.9%,电流总谐波含量为 2.9%,50Hz时电压总谐波含量也仅为4.3%。从实验波形可以看出,本文采用的新型di/dt环节,对三电平逆变电路输出波形并无影响。此外,本文 2.2节中所提出的相关方法和原理,不仅能够提高脉宽调制的安全稳定性,对提高脉宽输出的质量也同样具有积极作用。

图9 新型三电平逆变器输出波形Fig.9 The waveform of new three-level NPC inverter
图10所示为逆变器驱动6kV、380kW三相异步电动机在 30Hz运行时空载和带负载两种状态下瞬间闭锁全部脉宽控制信号后,逆变器的输出电压电流变化波形。从图10a中可以看出空载运行时,瞬间闭锁脉冲,逆变器的输出将会出现尖峰过电压和过电流,尖峰过电压达到额定值的 1.5倍,尖峰过电流达到2.5倍,图10b为带载时的紧急停机波形,考虑到装置安全,在图中所示T1时刻,首先分断输入断路器,之后在T2时刻再闭锁脉冲,从图中波形可以看出,即便分断了系统电源,由于电机惯性作用,其反向供电电压与电流均会达到很高的数值,对逆变器安全运行及其不利。图10的分析结果为后续的理论研究提供了试验和数据基础。
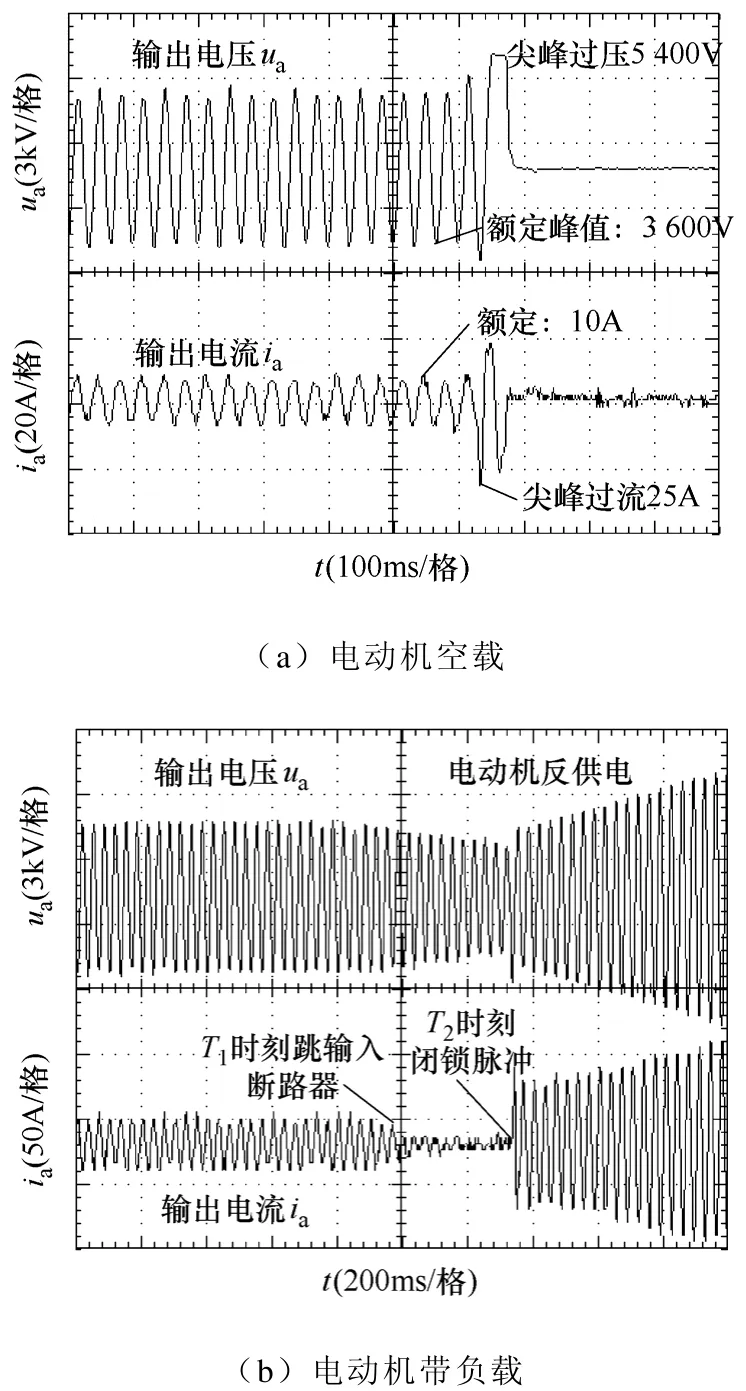
图10 紧急停机时逆变器输出电压电流波形Fig.10 Output voltage and current waveform during emergency shut-down
4 结论
传统中性点钳位三电平逆变电路在高压大功率场合面临着一系列新的理论和技术问题,本文针对主电路拓扑改进、脉宽控制安全稳定性提高中的关键技术问题进行了研究,并提出了一种基于分相独立 di/dt抑制电路的新型三电平逆变器,在主电路结构改动最小的基础上解决了传统三电平逆变器局部过电流问题,是对传统三电平逆变器结构的拓展。论文还将提高系统安全稳定性概念贯穿至脉宽调制研究之中,进一步丰富完善了高压大功率脉宽调制理论。今后,将继续结合现有试验结果,对高压大功率三电平逆变器的紧急停机措施,以及系统故障分析与自适应保护中的理论问题进行研究。
[1]余贻鑫, 栾文鹏. 智能电网述评[J]. 中国电机工程学报, 2009, 29(34)∶ 1-8.Yu Yixin, Luan Wenpeng. Smart grid and its implementations [J]. Proceedings of the CSEE, 2009,29(34)∶ 1-8.
[2]鲁宗相, 王彩霞, 闵勇, 等. 微电网研究综述[J].电力系统自动化, 2007, 31(19)∶ 100-107.Lu Zongxiang, Wang Caixia, Min Yong, et al.Overview on microgrid research[J]. Automation of Electric Power Systems, 2007, 31(19)∶ 100-107.
[3]刘杨华, 吴政球, 涂有庆, 等. 分布式发电及其并网技术综述[J]. 电网技术, 2008, 32(15)∶ 71-76.Liu Yanghua, Wu Zhengqiu, Tu Youqing, et al. A survey on distributed generation and its networking technology[J]. Power System Technology, 2008,32(15)∶ 71-76.
[4]Akagi H, Fujita H, Yonetani S, et al. A 6.6kV transformerless statcom based on a five-level diode-clamped PWM converter∶ system design and experimentation of a 200V 10kV·A laboratory model[J]. IEEE Transactions on Industry Applications,2008, 44(2)∶ 672-680.
[5]Madhav D Manjrekar, Peter K Steimer, Thomas A Lipo. Hybrid multilevel power conversion system∶ a competitive solution for high-power applications[J].IEEE Transactions on Industry Applications, 2000,36(3)∶ 834-841.
[6]李国栋, 毛承雄, 路继明, 等. 基于IGCT串联的三电平高压变频器直流环节研究[J]. 中国电机工程学报. 2007, 27 (1)∶ 82-87.Li Guodong, Mao Chengxiong, Lu Jiming, et al.Discussion on the DC-link of 6kV NPC three-level medium voltage drives based on IGCTs’series connection[J]. Proceedings of the CSEE, 2007, 27(1)∶82-87.
[7]Wang Dan, Mao Chengxiong, Lu Jiming, et al. Design of snubber for series IGCTs used in high power and medium voltage converter[C]. Proceedings of the 38th International Universities Power Engineering Conference, Thessaloniki, Greece, 2003, 1(9)∶ 157-160.
[8]刘健, 尹项根, 张哲, 等. 高压大功率三电平逆变器的 SPWM 数字化技术研究[J]. 中国电机工程学报. 2008, 28 (27)∶ 35-41.Liu Jian, Yin Xianggen, Zhang Zhe, et al. Study of SPWM digital technologies for high-voltage highpower three-level NPC inverter[J]. Proceedings of the CSEE, 2008, 28(27)∶ 35-41.
[9]Mondal S K, Pinto J O, Bose B K. A neuralnetwork-based space vector PWM controller for a three-level voltage-fed inverter induction motor drive[J]. IEEE Transaction Industry Applications,2002, 38∶ 660-669.
[10]胡存刚, 王群京, 李国丽, 等. 基于虚拟空间矢量的三电平 NPC逆变器中点电压平衡控制方法[J].电工技术学报, 2009, 24(5)∶ 100-107.Hu Cungang, Wang Qunjing, Li Guoli, et al. A neutral-point potential balancing algorithm for three-level inverter based on virtual-space-vector[J].Transactions of China Electrotechnical Society, 2009,24(5)∶ 100-107.
[11]Subrata K Mondal, Bimal K Bose, Valentin Oleschuk,et al. Space vector pulse width modulation of threelevel inverter extending operation into overmodulation Region[J]. IEEE Transactions on Power Electronics, 2003, 18(2)∶ 604-611.
[12]胡海兵, 姚文熙, 吕征宇. 三电平空间矢量调制的FPGA实现[J]. 电工技术学报, 2010, 25(5)∶ 116-122.Hu Haibing, Yao Wenxi, Lu Zhengyu. Realization of three-level SVPWM using FPGA[J]. Transactions of China Electrotechnical Society, 2010, 25(5)∶ 116-122.
[13]白华, 赵争鸣, 张永昌, 等. 最小脉宽特性对高压三电平逆变器的影响[J]. 电工技术学报, 2006,21(12)∶ 60-65.Bai Hua, Zhao Zhengming, Zhang Yongchang, et al.Effect of minimum pulse width on high voltage threelevel inverters[J]. Transactions of China Electrotechnical Society, 2006, 21(12)∶ 60-65.